农田地形测绘无人机增稳系统设计与实现
2022-07-07杜蒙蒙李若男姬江涛王鹏飞
杜蒙蒙, 李若男, 姬江涛, 王鹏飞, 何 平
(1. 河南科技大学农业装备工程学院,河南 洛阳 471003; 2. 河南泽达智能科技有限公司,河南 洛阳 471003)
0 引言
土地平整是建设高标准农田的重要技术措施之一,可显著提高农田灌溉效率,改善土壤盐分与养分的空间分布状况,减少病虫草害的发生,增加作物产量[1-2]。获取高精度的农田地形数据,是提高平整地作业精度与效率、降低平整地机具超载率与空载率的重要技术手段[3]。随着无人机技术的发展,多旋翼无人机被广泛应用在农业遥感与地形测绘作业中。基于激光测距技术的多旋翼无人机地形测绘系统融合全球导航卫星系统(GNSS,Global Navigation Satellite System)模块的定位数据、无人机飞行控制器的姿态数据及激光测距模块的距离数据,可实现农田地形数据的高效采集与处理,为生成高精度的农田数字地形图提供数据支持。然而,多旋翼无人机的螺旋桨通过螺栓直接安装在浆盘平面内均匀分布的直流电机上,其产生的升力始终垂直于浆盘平面,无法进行角度调节[4]。当多旋翼无人机以一定的速度朝向某一方位飞行作业时,往往依靠电机间的转速差形成相应的扭矩,使得无人机机体以“前低后高”的倾斜姿态获取相应的水平分力,以提供水平方向的加速度。当飞行方向或飞行速度改变时,无人机机体的倾角(俯仰角、横滚角与偏航角)相应地发生变化,反之亦然。由于固有的空气动力学特性及横风、空气乱流等多种外界因素的影响,多旋翼无人机飞行过程中机体倾角处于动态变化的状态,导致其负载设备工作性能与精度下降[5]。
为了消除无人机机体倾角变化对机载设备的影响,通常使用机械云台或电子云台对无人机的倾角变化进行补偿[6-8]。机械云台尺寸大、质量大及价格昂贵,不适合安装在小型无人机上。微型无刷电机控制的电子云台负载能力小,无法搭载尺寸大、质量大的地形测绘设备,应用范围通常局限于航拍领域[9-11]。
本研究基于步进电机与连杆机构,设计一种面向农田地形测绘无人机的大负载三轴增稳系统,通过增稳系统的实时调节实现对无人机机体倾角的动态补偿。增稳系统基于STM32 单片机,采用MPU6050 加速度传感器获取无人机的倾角数据,以倾角数据作为输入量控制步进电机输出相应的角位移,驱动曲柄连杆机构,使联结在曲柄连杆机构上的调平盘始终处于水平姿态,保障搭载在调平盘上的激光测距仪免受无人机机体倾角变化的影响,提高农田地形测绘无人机的作业精度。
1 地形测绘无人机增稳系统设计
1.1 工作原理
地形测绘无人机系统由多旋翼无人机、高精度GNSS 模块、增稳系统及激光测距仪组成,如图1 所示。GNSS 移动站及激光测距仪分别安装在无人机的顶端与底部。通过地面控制站将飞行路径导入无人机的飞行控制器,无人机按预定路径完成飞行任务。在无人机返回地面后分别获取激光测距仪的测距序列、GNSS 移动站数据及静置在地面的GNSS 基站数据。以GNSS 基站数据为基准,利用后处理动态差分方法修正GNSS 移动站数据,获取厘米级精度的无人机定位数据(xGi,yGi,hGi),其中xGi,yGi,hGi分别为无人机的经度、维度和海拔高度[12]。

图1 地形测绘无人机系统Fig. 1 Sketch of drone topographic surveying system
从无人机地形测绘系统的定位数据(xGi,yGi,hGi)中提取hGi分量,计算GNSS 移动站的天线模块与激光测距仪的安装高度差d及激光测距高度序列h,根据式(1)获取地面测量点的海拔高度序列hi。 使用hi替代无人机地形测绘系统的定位数据(xGi,yGi,hGi) 中 的hGi分量,即获取地面测量点的三维坐标数据(xGi,yGi,hi)。

在无人机飞行过程中,动态变化的无人机机体倾角严重影响激光测距高度序列h的测量精度,间接导致地面点海拔高度数据hi精度的下降,迫切需求设计一种具有自稳能力的增稳系统,抵消无人机倾角变化造成的影响。
1.2 结构组成与运动学分析
本研究设计的增稳系统面向多旋翼无人机地形测绘作业,由固定盘、执行机构和调平盘3 部分组成,具有结构简单、质量小和响应快等优点,其结构简图与结构参数分别如图2 和表1 所示。
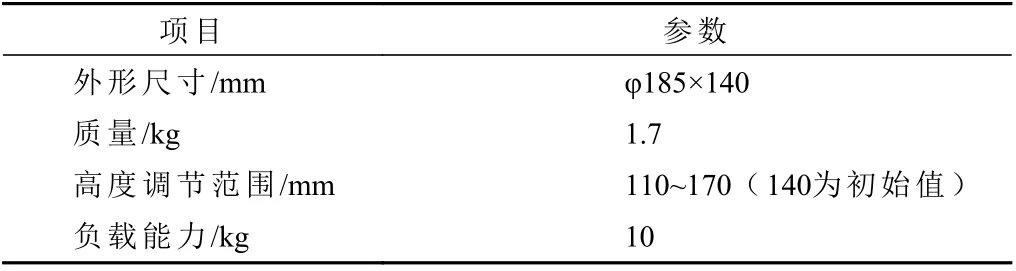
表1 增稳系统结构参数Tab. 1 Structure parameters of stability augmenting system.

图2 增稳系统结构Fig. 2 Structure of stability augmenting system
固定盘与无人机机体通过螺栓固定连接,并为均匀分布的3 个步进电机提供安装位置。步进电机的动力输出轴通过曲柄连杆机构连接至调平盘。调平盘上安装MPU6050 加速度传感器,集成3 轴电子陀螺仪与 3 轴电子加速度计,实时测量调平盘的角度变化。MPU6050加速度传感器通过测量重力加速度在x轴、y轴和z轴上的投影分量,根据式(2)、式(3)和式(4)分别计算绕各轴的旋转角度,并将角度信息转化为电压信号传输至STM32 单片机,控制步进电机输出相应的角位移,利用曲柄连杆执行机构动态补偿调平盘的角度变化,从而使调平盘保持水平姿态[13-15]。
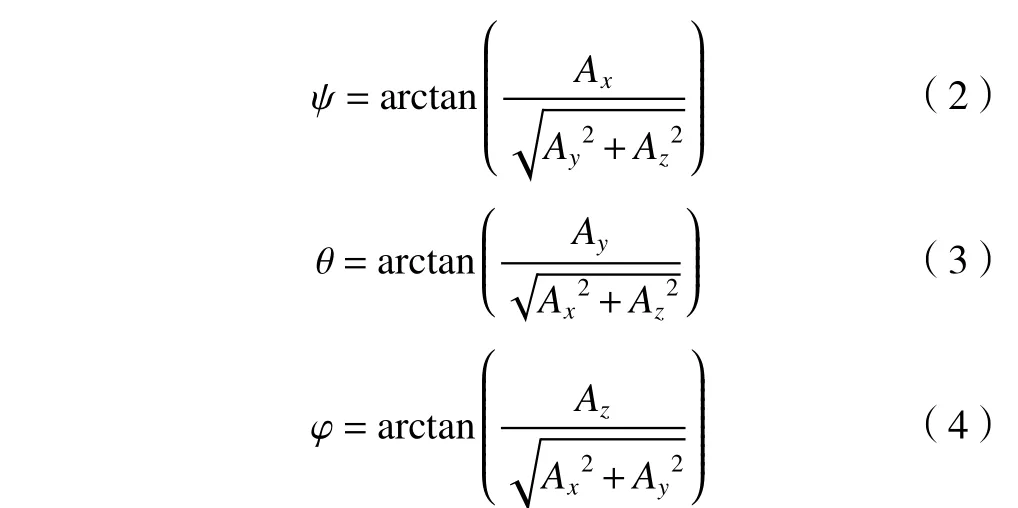
式中 ψ、θ、 φ−MPU6050 加速度传感器绕x轴、y轴和z轴的旋转角度
Ax、Ay、Az−重力加速度在x轴、y轴和z轴方向上的投影分量
为了使增稳系统快速、稳定地实现自动调平,动态补偿无人机的倾角变化,本研究控制增稳系统在空间上的3 个自由度,即2 个水平轴旋转自由度与1 个竖直轴平移自由度。选择3 组带有光电编码盘的步进电机作为动力元件,因此,增稳系统为全驱动系统,具有响应迅速、结构简单的优点。步进电机的输出轴通过3 组并联的曲柄连杆机构将运动传输至调平盘,使其始终保持水平姿态,不受无人机机体倾角变化的影响。增稳系统的运动简图如图3 所示。

图3 增稳系统运动简图Fig. 3 Motion diagram of stability augmenting system
步进电机是一种由脉冲信号控制角位移的开环控制元件,电机输出轴的角位移与控制信号脉冲数成线性关系,无累积位置误差,广泛应用在数控系统等领域。该步进电机配套500 线AB 相光电编码器,步距角1.8°。定义3 个步进电机分别为电机A、电机B 和电机C,呈120°夹角中心对称分布。安装在调平盘上的MPU6050加速度传感器实时检测其俯仰角变化量 Δθ与横滚角变化量 Δψ 。STM32 单片机获取调平盘的俯仰角变化量Δθ与横滚角变化量 Δψ,根据运动学方程式(5)、式(6)和式(7)分别计算3 组步进电机相应的输出轴角位移α 、 β 、 γ。步进电机输出角位移驱动曲柄连杆机构,补偿调平盘的俯仰角与横滚角变化量,使得调平盘始终处于初始水平状态。
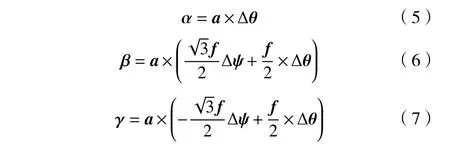
式中f−固定盘与调平盘之间的原始行程
Δθ−俯仰角变化量
Δψ−横滚角变化量
α、 β 与 γ−步进电机A、B、C 各自的输出轴角位移(顺时针旋转为正、逆时针为负)
a− 步进电机位置常数
1.3 仿真建模分析
本研究在三维设计软件Solidworks 环境下,利用仿真设计功能,对地形测绘无人机的增稳系统进行三维建模与仿真分析。通过运动干涉分析优化结构尺寸,并利用有限元仿真分析插件“Simulation”对增稳系统的三维模型进行应力仿真分析,检验其在最大载荷时的应力状况,为加工样机及轻量化材料选型提供数据支持。
仿真分析流程如下。首先,选择7 075 T6 铝合金板材配置增稳系统各零件的材料属性。其次,建立有限元分析模型,根据增稳系统最大负载质量(10 kg),在Solidworks Simulation 环境下将均布载荷98 N 施加于调平盘上,基于混合曲率网格计算增稳系统的应力云图,如图4 所示。根据Simulation 仿真分析结果报表可知,增稳系统在最大负载工作状态下最大应力为18.4 MPa,远小于7 075 T6 铝合金板的屈服强度(505 MPa),满足设计要求。

图4 增稳系统应力分布Fig. 4 Stress distribution of stability augmenting system
2 增稳系统样机性能测试与分析
根据工作原理及运动学分析,试制地形测绘无人机的增稳系统样机如图5 所示。通过螺栓将增稳系统的固定盘安装在无人机平台底面,并在调平盘上安装负载工作部件激光测距仪器及检测无人机机体倾斜角度的MPU6050 加速度倾角传感器。

图5 增稳系统试验样机Fig. 5 Sketch of stability augmenting system’s prototype
为了检验增稳系统的动态调平性能,在其固定盘上安装另外1 组MPU6050 加速度倾角传感器。两组倾角传感器在水平x轴及水平y轴方向上保持一致,同步测量固定盘(无人机机体)及调平盘(激光测距仪)的倾角变化,获取固定盘绕水平x轴的倾角数据与绕水平y轴的倾角数据各计700 组,以及增稳系统动态补偿后的调平盘绕水平x轴的倾角数据与绕水平y轴的倾角数据各计700 组。分析无人机姿态发生变化时调平盘的动态补偿性能,如图6 所示。

图6 增稳系统试验样机动态调平测试数据Fig. 6 Dynamic test data of stability augmenting system’s prototype
试验数据显示,固定盘绕水平x轴的倾角数据最大值及最小值分别为24.03°及−15.06°,相应地,经增稳系统动态补偿后调平盘绕水平x轴的倾角数据最大值及最小值分别为2.68°及−2.52°。同理,固定盘绕水平y轴的倾角数据最大值及最小值分别为38.73°及−26.55°,经增稳系统动态补偿后调平盘绕水平y轴的倾角数据最大值及最小值分别为2.30°及−2.23°。数据同时表明,固定盘绕水平x轴倾角数据与y轴倾角数据的标准差分别为7.09°及9.44°,相应地,经增稳系统动态补偿后调平盘绕水平x轴倾角数据与y轴倾角数据的标准差分别为0.58°及0.59°,增稳系统的动态调平效果显著。
3 结束语
本研究面向农田地形测绘无人机设计负载增稳系统。增稳系统由固定盘、曲柄连杆机构和调平盘3 部分组成,结构简单、响应快速。
仿真分析结果表明,增稳系统结构配置合理,未出现结构干涉现象;在最大负载状态下,满足强度要求。
增稳系统样机性能测试数据显示,经增稳系统动态补偿后的调平盘绕水平x轴及y轴的倾角变化均得到了大幅改善,倾角范围<3°,标准差<0.6°。与无人机机体倾角>15°、标准差>7°的数据相比较,增稳系统的动态调平效果显著,大大改善农田地形测绘精度。
