基于改进势场法的无人机编队协同避障控制算法
2022-07-07孙翊君代冀阳
孙翊君 代冀阳 应 进 聂 航
(南昌航空大学信息工程学院 江西 南昌 330063)
0 引 言
无人机编队协同飞行控制研究已成为近年来的一个前沿课题,其不仅可以发挥单架无人机具有的机动性能优势,还可以多架无人机协同合作共同完成较为复杂的任务,是一种典型的多智能体系统[1]。而这些协同控制任务的实现均建立在多智能体系统的一致性问题研究框架内,因此针对无人机编队协同避障控制策略的进一步研究是具有重大意义的。
目前,人工势场法因其原理简单、实时性好等优点在无人机编队控制、航迹规划领域得到了广泛应用,但其极易因障碍物影响出现死锁以及目标不可达问题等[2-3]。文献[4]通过将斥力偏转一定角度来避免传统势场法死锁问题;文献[5]使用双向人工势场的概念使控制对象避开局部极点;文献[6]引入回环力、无人机间作用力来解决死锁以及编队安全问题。但上述算法未明确编队间距与架构通信问题,且未考虑无人机状态一致问题。基于图论法则是研究一致性问题的重要工具[7-8]。文献[9]在文献[6]基础上分别设计了三个代价函数进行优化控制,但无人机相对位置不明确,未能保证固定的编队结构;文献[10]提出了单一领导者的多智能体系统一致性算法,通过势场函数避免机间自碰撞,有效地使智能体速度达成一致,但忽略了路径避障问题;文献[11]在假设领导者路途无障碍的前提下提出基于一致性算法和人工势场法的编队避障控制律,但构造的势场函数较为简单,易出现死锁问题;文献[12]在此基础上基于多虚拟领导者进行编队控制,增加指向领导者任一侧的势场旋转力跳出死锁,但实际环境较为复杂,一旦与领导者失去通信,编队将难以维持,且其模拟环境较为理想化,实际应用价值较低。
鉴于此,本文针对分布式无人机编队,采用分段思想、增加指向目标侧的旋转力、机间力改进势场函数以解决死锁等问题,并将得到的势场精确控制输出作为期望状态值,结合一致性理论对航迹位置、速度进行误差修正,提出一种图论法和势场法相结合的无人机编队协同避障控制策略,实现编队航行顺利以及各无人机间的状态一致性。利用系统的动能与势能构造Hamilton函数讨论编队收敛性,利用反证法证明编队稳定性,并以不同形状的障碍物模拟复杂环境,通过仿真验证该算法的有效性以及收敛性。
1 问题描述
1.1 无人机编队建模
首先,考虑二维空间中具有n架无人机的编队模型,第i架无人机运动学方程设为二阶积分器模型为:
(1)
式中:xi=(xix,xiy)为无人机i的位置状态;vi=(vix,viy)为其速度状态;ui=(uix,uiy)表示其控制输入。
则可定义以下向量作为所有n架无人机的积分状态向量:
(2)
在无人机编队的一致性控制中,假设每一架无人机上均安装有信息接收发送装置,并且无人机间的数据传输准确、无延迟、无数据丢包等问题,那么在图论理论中,无人机间信息的互换网络拓补结构可通过图G=(V,E)来表示。V={1,2,…,n}表示其节点的非空集合,每一个节点都表示一架无人机。E={(i,j)|i,j∈N,i≠j}表示其边集,(i,j)∈E表示无人机i可以获取无人机j的状态信息[13],但反之不可。若无人机i与j之间可双向通信,则表示图G为无向图。其拉普拉斯矩阵定义为L=D(G)-A(G)。其中:D(G)=diag(d(i))表示其入度矩阵,d(i)为向节点i传输信息的节点数目;A(G)=[aij]表示其邻接矩阵,aij为边(i,j)的权值。
(3)
假设由固定无向连通图来表示无人机编队的通信传输方式,那么四无人机编队的网络拓补结构图如图1所示。
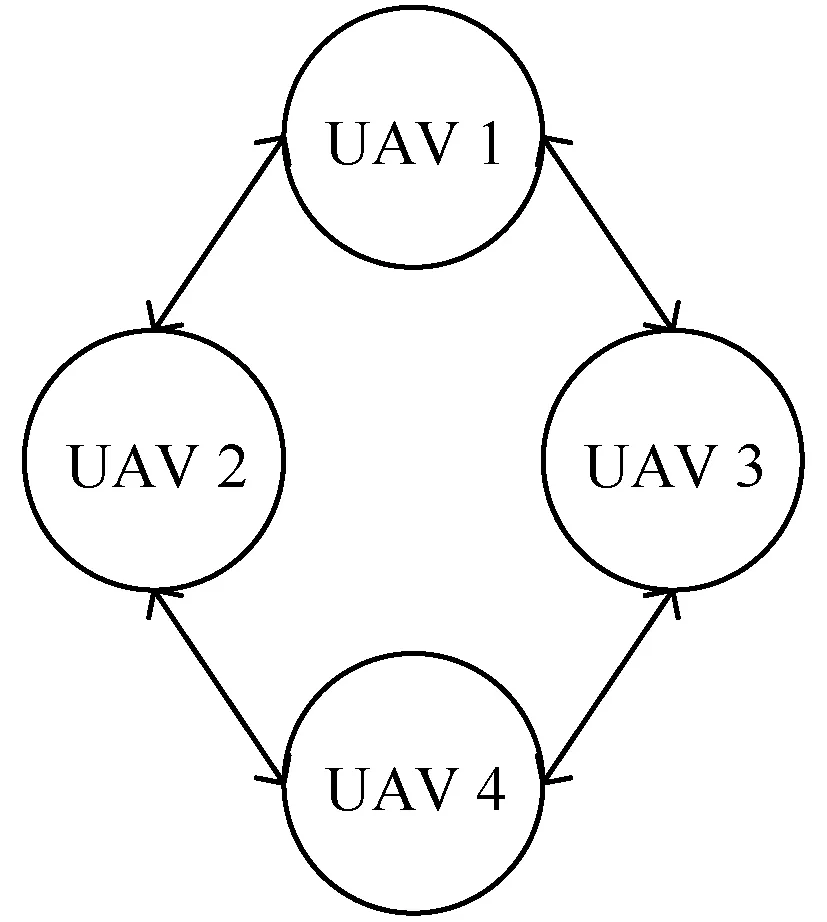
图1 无人机编队通信拓补图
1.2 编队控制目标
对于上述无人机编队系统,不论其初始状态如何,若能够满足式(4),则称当t→∞时,多无人机可以按照期望的速度以及编队队形轨迹收敛,达到了一致性:
(4)
式中:ρa表示无人机i与无人机j之间的相对最佳间距,以此可保持预期编队队形。若ρa为0,则表示为普通的无人机编队系统一致性控制要求。
本文将采用普通的系统一致性控制协议,至于无人机间相对最佳间距与位置的保持将以人工势场法为基础的机间势场力来替代,以求实现精确控制;另外,无人机编队的避障问题同样以改进的人工势场法进行控制实现。即若无人机编队系统满足式(5),则称多无人机可以在保证自身安全稳定的前提下完成任务。
(5)
式中:xk(t)表示无人机i和障碍物k几何中心的连线与障碍物表面相交所得交点的空间位置。ρ(xi(t),xj(t))、ρ(xi(t),xk(t))则分别表示无人机i与无人机j、障碍物k之间的相对距离。
2 改进人工势场法
2.1 传统人工势场理论
传统人工势场法定义是基于物理学中的势能场演变而来,无人机在整个环境内受到目标位置的引力势场能作用以及障碍物对其的斥力势场能作用,而后无人机将在所受势场能产生的合力作用下以合力方向向目标位置移动。其原理图如图2所示。
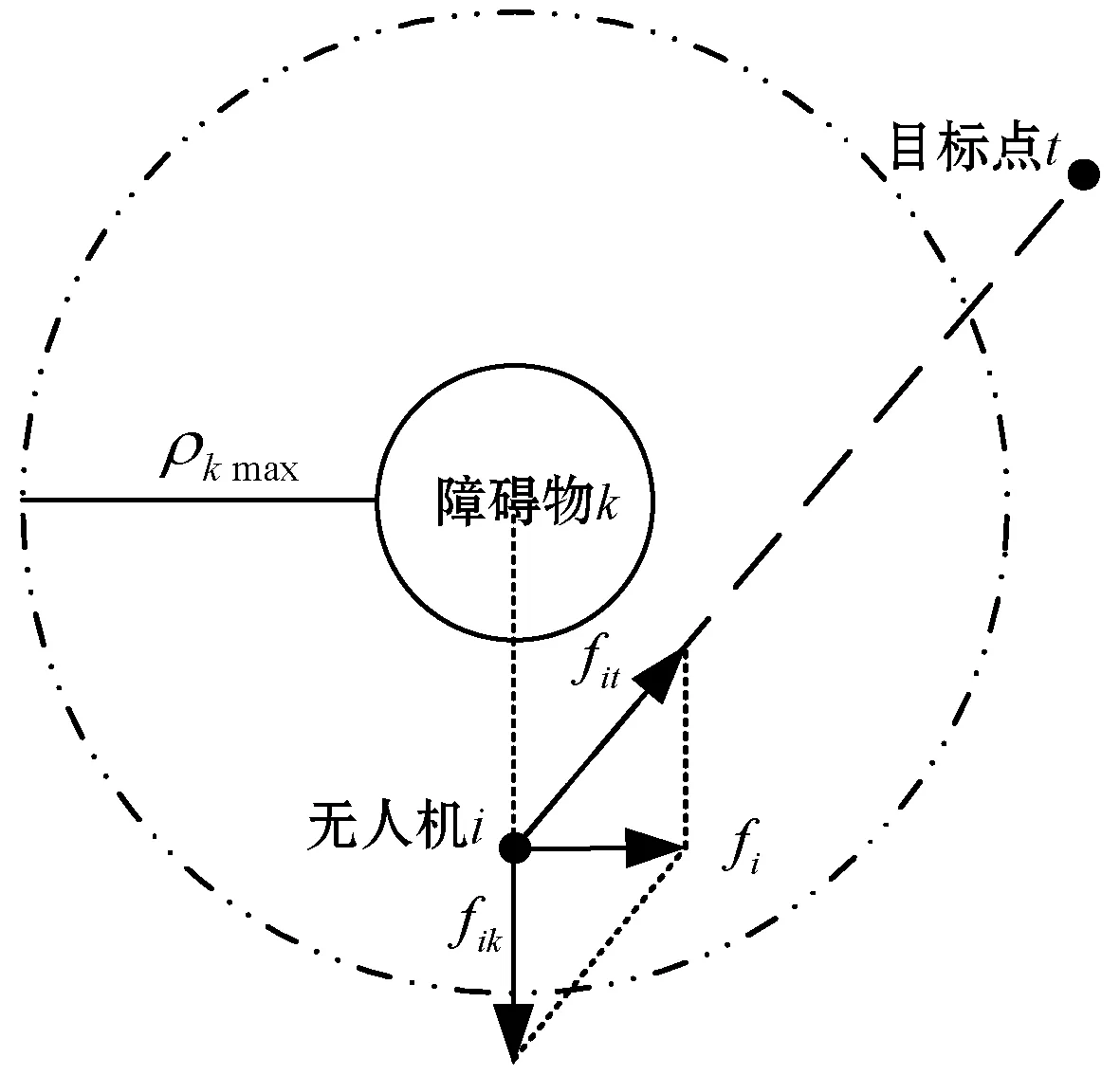
图2 传统势场法原理图
引力场与斥力场函数定义如下:
Uit(xi)=0.5αρ2(xi,xt)
(6)

(7)
式中:α、β分别表示引力、斥力增益系数;ρk max则表示无人机i所受障碍物k影响的最大范围。
但应用传统势场法进行航迹规划时,无人机在航迹前方具有规律排布的障碍附近时,极易因所受的合力势场作用变为零而陷入局部极小点,造成停滞飞行的情况;无人机在即将抵达目标位置时,若目标前存在一定的障碍物布置,则此时的无人机所受斥力势场极有可能大于引力势场,造成不能到达目标位置的可能。因此需要将传统势场函数加以改进后应用,故在文献[6]的基础上采用分段思想、增加旋转力、机间势场力等手段将传统势场法加以改进后应用于本文所提无人机编队模型。
2.2 势场函数改进
首先应用分段思想对传统势场函数进行改进:
(8)
(9)
式中:α1、α2表示引力增益系数,且α1>α2,即当其小于无人机间的最佳间距时,以通过增加引力增益系数的手段增大引力场作用,解决目标不可达问题;β表示斥力增益系数。
对其求负梯度可得到如下的引力与斥力模型:
(10)
fik(xi)=-▽Uik(xi)=
(11)
式中:θit为无人机i所受引力的角度;θik为无人机i所受障碍物k斥力的角度。
另外,为解决局部极小值问题,在无人机所受合力计算中引入一个附加旋转力,定义在无人机受到斥力作用的垂直方向上,它的指向与目标侧一致,表达式如下:
fic(xi)=[fic(xi)cosθic,fic(xi)sinθic]
(12)
式中:θic为无人机i所受旋转力的角度;ζ表示旋转力增益系数;η表示旋转力启动参数;ρk min则表示障碍物k影响的最小范围。
无人机间的相对最佳间距保持则以机间势场力来精确控制实现,定义为无人机接近时,机间势场力表现为斥力;当无人机远离时,势场则表现为引力。根据图1所示编队结构,具体表达式如下:
fij(xi)=-▽Uij(xi)=
(13)
式中:θij为无人机i与j之间势场力的角度;ε表示无人机间势场力增益函数;ρa max、ρa min则表示无人机间距允许的最大值和最小值。
因此无人机i所受的势场合力控制输入如下:
fi=fit(xi)+fio(xi)+fic(xi)+fia(xi)
(14)
考虑被控对象为质点模型,那么无人机的速度vi=fit,则预规划得到无人机下一时刻的位置为xi(t+1)=xi(t)+viΔt,Δt表示时间步长。
但人工势场法只能保证编队的相对架构,不能实现状态的一致性。文献[11]以领导者状态作为期望状态值以实现编队协同控制,然而领导者一旦出现问题编队将难以为继。因此本文将采用预规划得到的势场精确输出作为期望状态值,结合一致性理论进行状态误差修正,达到编队状态收敛控制目标。
3 无人机编队协同避障控制器设计
3.1 编队协同避障控制器设计
对于编队中处于任意状态的无人机,为了保证在安全避碰避障到达目标的前提下还能够实现无人机编队的一致性,提出应用于多无人机系统的编队协同避障控制协议如下:
i∈{1,2,…,n}
(15)
(16)
3.2 稳定性分析
将式(15)代入式(1)可得无人机i运动学模型为:
i∈{1,2,…,n}
(17)

(18)

(19)
其中多机系统的拉普拉斯矩阵如下:
(20)
因此无人机编队系统的运动学模型表示为:
(21)
首先考虑以下齐次方程的稳定性:
(22)
选取编队系统的总能量构造Hamilton函数,其包括势能以及动能函数,具体定义如下:
(23)
对其求导得:
vT·(-f-γ0Lx-γ1Lv+f+γ0Lx)=
(24)

非齐次方程一般解为通解与其特解之和,那么在t→∞时,式(21)的解渐变收敛为[x′,v′]T。
综上:当增益设置为γ0>0,γ1>0,编队内所有无人机的状态值将趋于最大不变集中,且所有无人机的状态值都能够收敛到期望位置和期望速度并趋于一致,机间间距能够收敛到最佳距离并渐进保持稳定,形成编队队形。
接下来采用反证法进行无人机机间势场力能够有效避免机间碰撞的证明。
当无人机的初始状态(x(0),v(0))∈LH(c)时,假设t=t1>0时刻至少存在两架不同的无人机发生碰撞,定义两架无人机分别为k、l,那么此时机间势场能量Ukl(xk(t1))→∞,那么:
Ukl(xk(t1))→∞
(25)
这与H(x(t),v(t))≤c的事实相悖,即∀t≥0,反证法的假设条件是不成立的,可得无人机之间不会有相互碰撞的情况发生。
对于无人机编队在飞行途中能否有效躲避障碍物的证明同样可以采用反证法进行相似的分析验证。由此无人机编队系统的稳定性与一致收敛性得以证明。
4 仿真分析
为了验证所提出算法的有效性,模拟实际环境中无人机可能遇到的复杂障碍物,分别以传统势场法与协同避障控制算法引导无人机编队进行航迹仿真。实验考虑四架可相互通信的无人机编队系统,其通信拓补图如图1所示,则其拉普拉斯矩阵为:
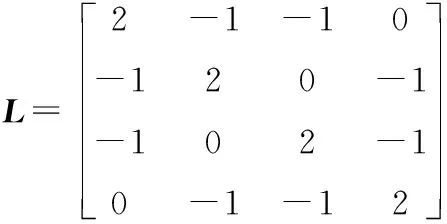
(26)
首先设置编队控制协议相应的参数:n=4,γ0=0.1,γ1=10,α1=1.5,α2=3.0,β=3.0,ζ=0.05,η=350,ε=4 000。选取代表性的圆、正六边形、凸形、L形模拟真实障碍,尽可能表示无人机飞行中可能遇到的各类障碍边界,其质心坐标位置分别为(40,50)、(45,30)、(21.5,36.5)、(28,15),ρk max=20,ρk min=0.1。四架无人机的位置状态信息如表1所示,ρa=3,ρa max=10,ρa min=0,期望速度设为5 m/s。
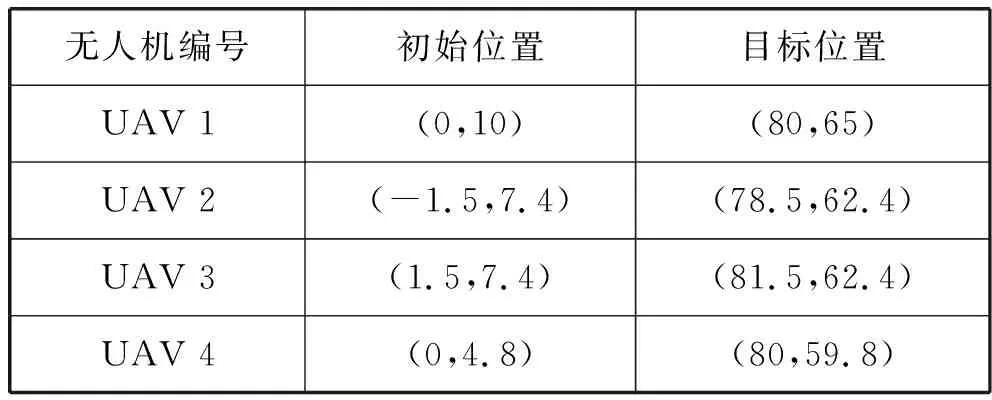
表1 无人机位置信息
采用传统势场法引导式(1)所描述的四架无人机在上述复杂飞行环境中,由初始位置出发所得运动轨迹如图3所示,而采用式(14)-式(16)所示的无人机编队协同避障控制策略所得仿真结果如图4-图7所示。
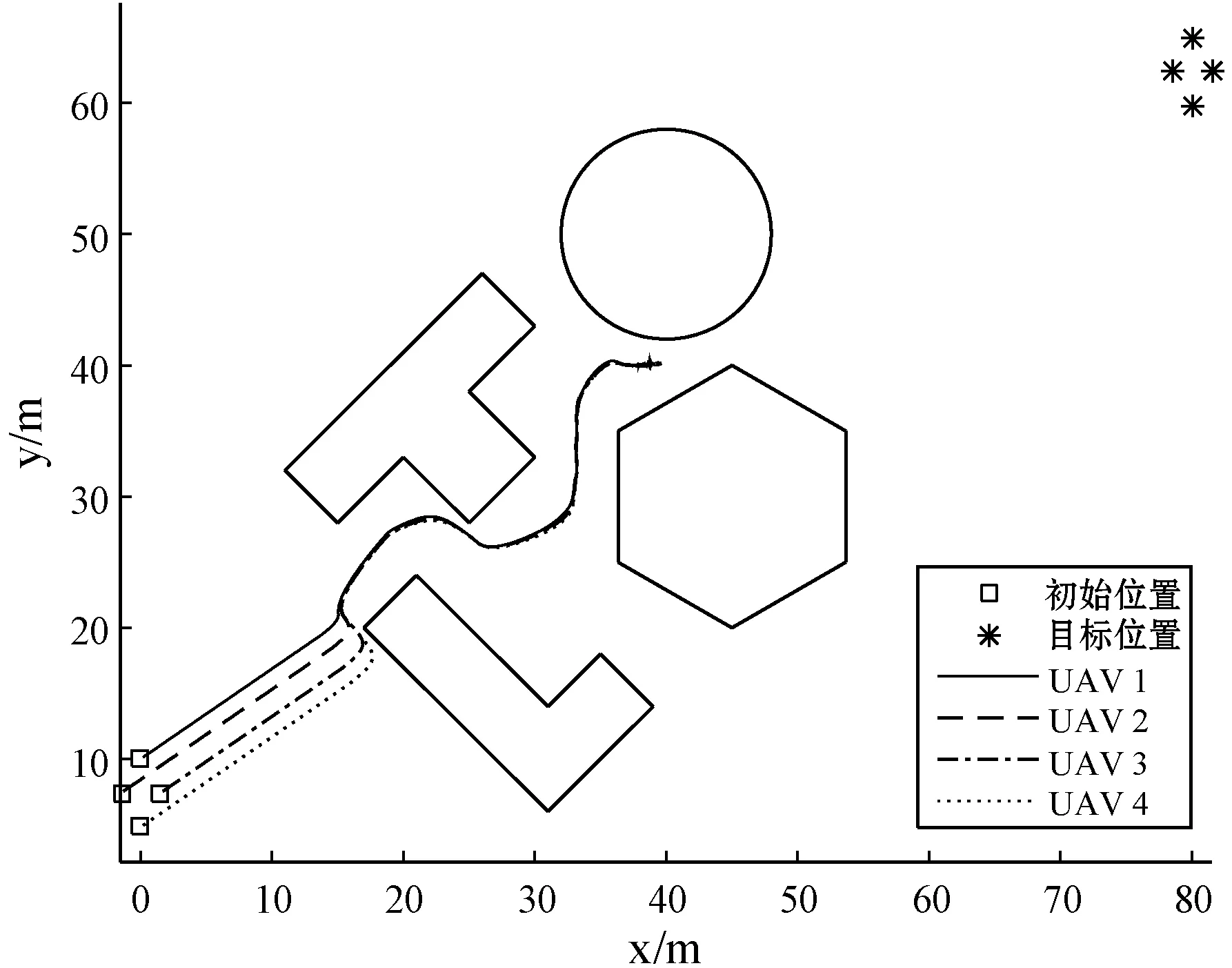
图3 传统势场法作用下的无人机编队运动轨迹
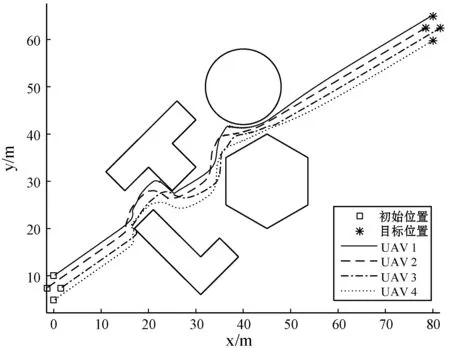
图4 改进算法作用下的无人机编队运动轨迹
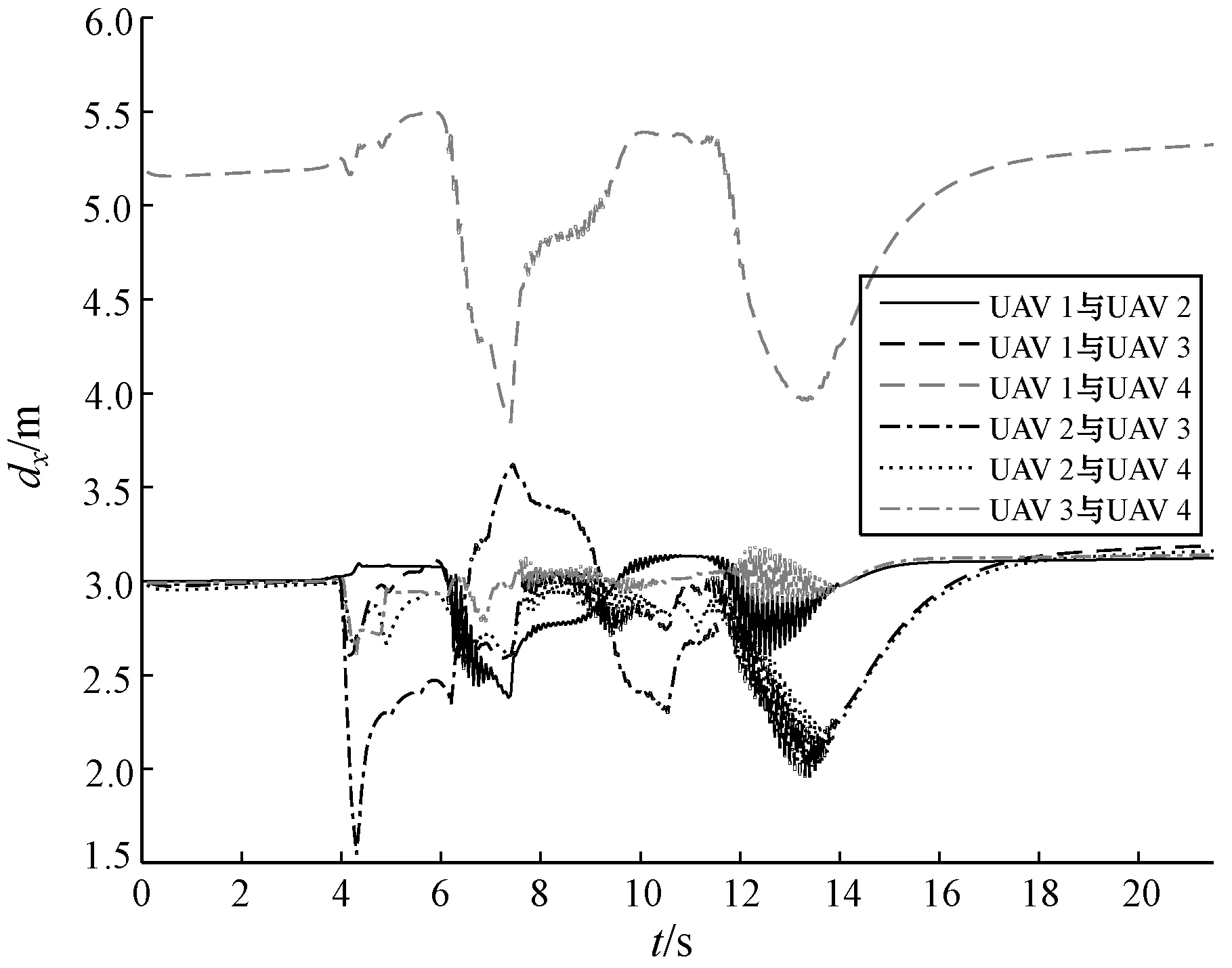
图5 各架无人机间的相对距离
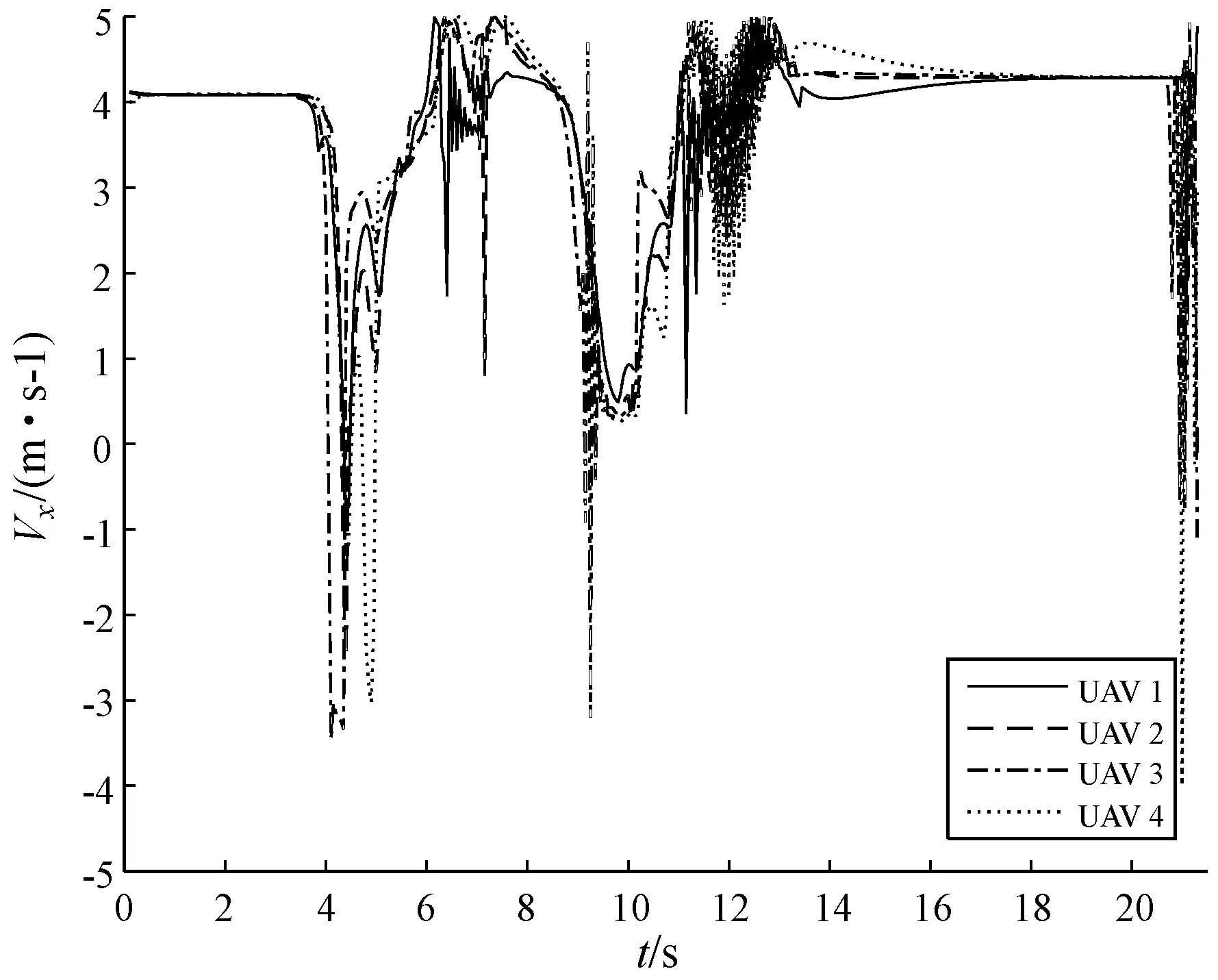
图6 各架无人机x轴速度分量
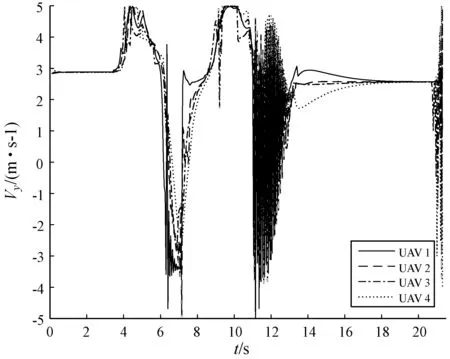
图7 各架无人机y轴速度分量
由图3可看出,传统势场法在作用于无人机编队时,各无人机之间不能保持相对间距且在障碍物间隙陷入死锁,未能完成飞行任务。而图4中,在本文所提出的编队控制策略作用下,四架无人机能够良好实现编队避障,并最终到达目标位置。结合图5可得,无人机间距始终不为零,说明控制策略能够保证无人机的飞行安全,良好实现机间避碰;当编队安全通过障碍物区域之后,四架无人机在18 s左右能够迅速地稳定到期望的编队队形。
由图6、图7分析可得,在控制策略作用下的各架无人机在x轴与y轴方向上的速度分量能够在较短的时间内收敛至期望速度,并趋于一致。另外在即将抵达目标位置时,四架无人机的速度呈现出一定的波动,这说明在无人机所受目标引力势场作用上进行的改进手段是具有有效性的。
综上,利用本文提出的无人机编队协同避障控制策略,当无人机编队在飞往目的地的过程中能够很好地保证自身的安全稳定,并能够在避障避碰的前提下以较快的速度收敛至期望的编队队形以及期望航行速度,实现位置以及速度的一致收敛,从而达到预期设计目标,验证了所提出算法的优越性。
5 结 语
本文针对采用二阶积分器模型的无人机,通过图论描述无人机编队之间的通信关系,以人工势场产生的精确控制输入和一致性理论为基础,提出一种基于图论法和人工势场法相结合的无人机编队协同避障控制策略,利用LaSalle不变集原理讨论了系统的稳定性,证明了所提出控制算法的收敛一致性。最后通过仿真模拟来印证此控制策略的有效性与优越性,结果表明无人机编队在控制策略作用下能够成功避开障碍,以较短的时间收敛至期望速度以及编队队形,并保持稳定到达目标位置。
