精液质量分析系统的应用技巧
2022-07-06朱宽峰北京田园奥瑞生物科技有限公司
文│朱宽峰(北京田园奥瑞生物科技有限公司)

计算机辅助精液质量分析系统(computer assisted semen analysis system,CASAS)是使用计算机技术进行精液质量分析的仪器,正确使用可以有效降低人工检测的误差大、主观性强的缺点。但很多技术员甚至科研人员对CASAS不太了解,存在一些误解,笔者根据对CASAS研发与使用的经验对CASAS做一个介绍,期望能让大家对此有更多的认识。
一、CASAS的原理
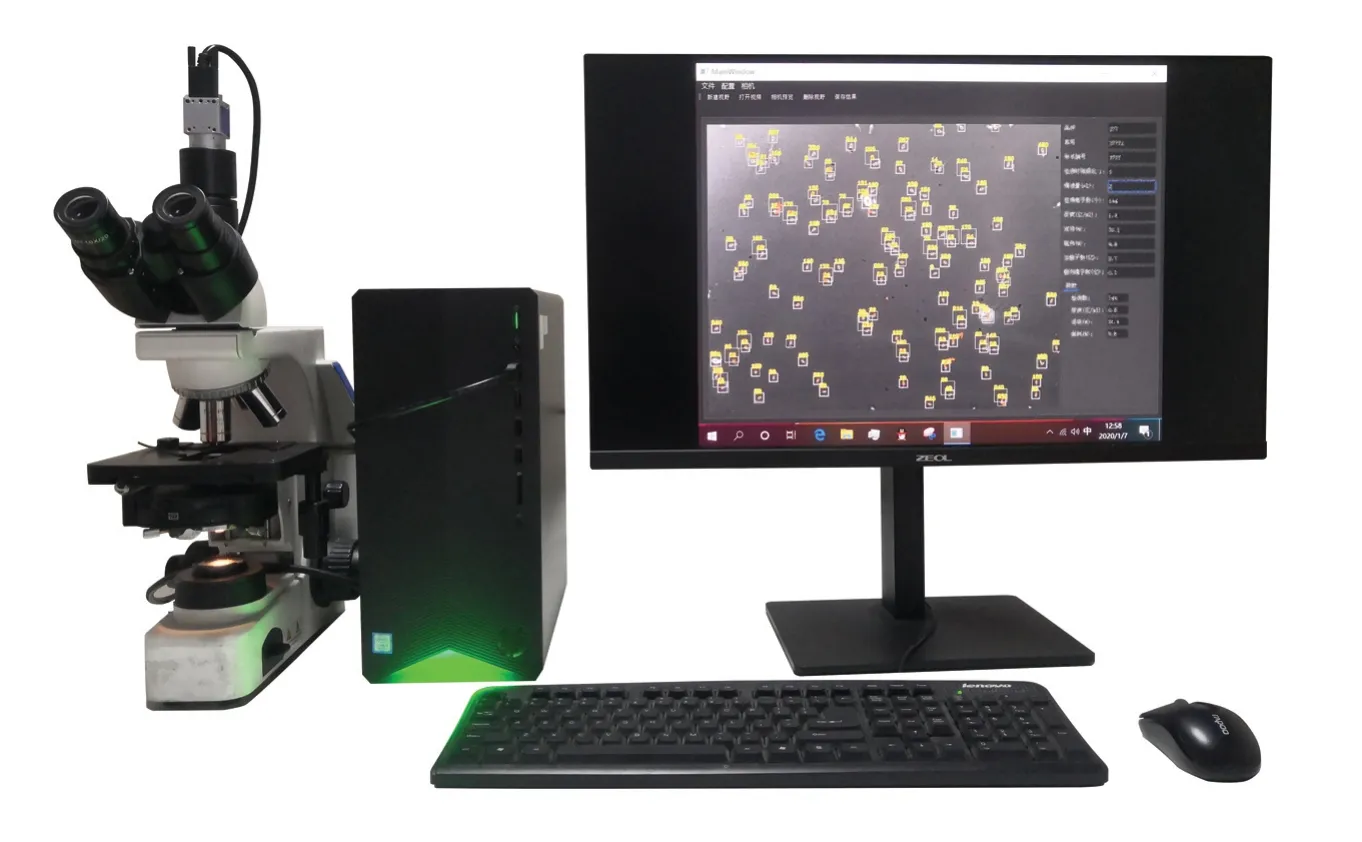
1.CASAS系统组成。包括硬件和软件两部分,其中硬件主要包括显微镜、高清高速摄像头、计算机等部分,软件包括相机驱动软件、精液质量分析软件等。
2.原理。显微镜成的像被高清摄像头采集,经过计算机处理后识别出精子,并构建精子轨迹,进而计算出精子各项运动参数,并输出各项监测指标。
(1)精子识别。精液样品,更为通常杂质比较少,最简单的识别方法就是将图像中一定大小范围的亮斑或者暗斑识别出来即可,更为精确的还需要计算斑块的长度宽度等信息。有一些智能算法则是基于训练模型,先通过人工训练,积累数据,优化模型从而对实际样本进行检测。
(2)构建轨迹。相机获取的是一系列有时间顺序的静态图像,通过一定的算法将这些图像中的精子进行一一匹配,从而构建出所有精子的运动轨迹。
(3)运动参数定义。最基础的运动参数定义见表1,对应的示意图见下图。根据这些参数的定义可以计算出各种运动参数,并为活力、活率等指标的计算做基础。
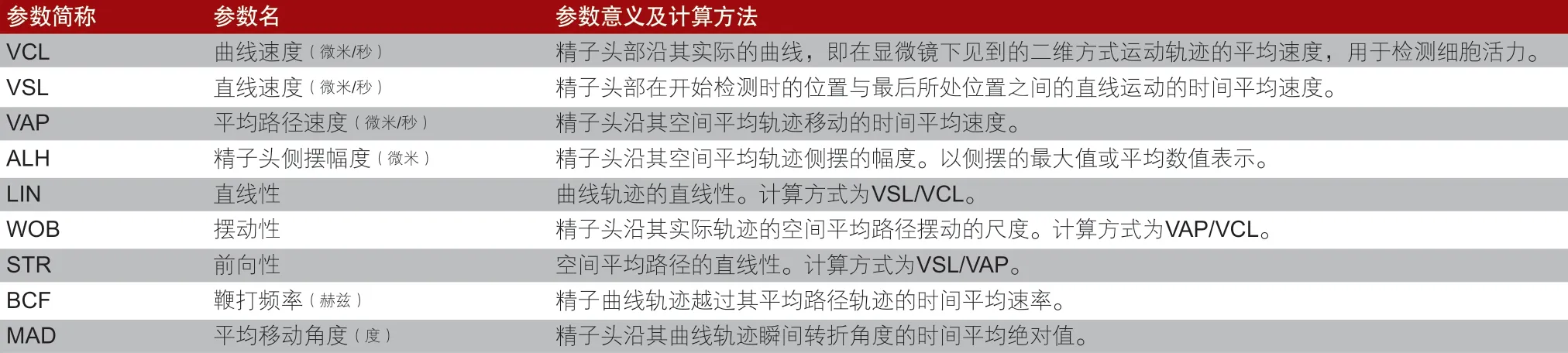
表1 精子运动参数表
(4)主要指标的定义。主要的指标包括密度、活力、活率,以及其他一些辅助的指标。
活力是指前向精子占总精子的百分比,活力=视野中前向精子数/视野总精子数×100%。
活率是指活动精子占总精子的百分比,活率=视野中活动精子数/视野总精子数×100%。
密度是指单位体积的精子数,密度=视野精子数/视野体积=视野精子数/(视野长度×视野宽度×腔室厚度)。
一般检测时多个视野的平均值或者汇总数据,因此还需要对上述数据求平均值。
二、引起检测误差的因素
1.成像质量。所有的分析基础都建立在成像的基础上,成像不清晰的话会导致子识别困难。从样品到软件识别的图像,需要经过显微镜物镜成像、摄像头采集、图像处理等多个步骤,每一个步骤有问题都会影响图像质量。
(1)显微镜。对于显微镜成像来说,光源的稳定性和均匀性、镜片有无上有无灰尘、镜头是否污染、盖玻片厚度是否与镜头匹配都会影响成像质量。不同类型的显微镜成像清晰度也不一样,是否正确使用也是关键。对于普通生物显微镜来说,可变光阑是否调到合适位置其成像质量也会有很大差异。对于相差显微镜来说,聚光镜是否调到位、相差环是否对中、相差片与物镜是否对应都能影响显微镜的成像质量。
(2)玻片。对于玻片来说,玻片洁净度是严重影响成像质量的一个因素,脏的玻片会使精子和脏物之间难以区分。盖玻片厚度会影响光程,因而影响成像,一般物镜上都会有标注,通常是0.7毫米厚的盖玻片最适宜。
玻片腔室厚度过大会导致视野有多层精子,精子运动表现为明显的三维运动,当精子不处于焦平面时成像不清晰,从而影响精子识别。而当精子在不同层之间来回穿梭时会导致精子跟踪失败。
(3)摄像头与相机驱动。对于摄像头来说,分辨率和信噪比是十分重要的参数。分辨率越高,信噪比越高,则成像越清晰,越有利于精子识别。但过高分辨率会导致图像数据量过大,增大计算机处理工作量,降低分析速率,一般来说,在物镜放大基础上,相机的分辨率应该达到1微米/像素以内,否则看不见精子尾部。曝光时间也会影响成像质量,曝光时间太短,则获得的信息不足,图像模糊;曝光时间过长,由于精子是运动的,会导致精子重影,也会使图像模糊。
一般来说,应该使显微镜光照尽量强一些,以尽量缩短曝光时间。
通过对相机参数进行合理调整和设置,或者专门对采集到的数据进行增强和降噪,都能够提升图像质量。
2.震动。由于精子本身尺寸只有几微米,实验台几微米的震动都会明显影响精子的运动轨迹,导致本来静止的精子表现出活动迹象,而活动精子VCL也会略微增大。因此放置显微镜的操作台应该平稳防震。
3.温度。一定范围内,温度越高精子活跃度越高。但是由于载物台中间要留出光通道,中间有空槽,恒温载物台在这个位置温度也会比其他位置低。载玻片越薄,经载玻片传导的热量越少,中间的温度也就越低。因此应该保证载物台中央温度达到规定的37℃~38℃。
4.精子面密度。面密度是指单位面积的精子数,影响面密度的因素包括精子密度和腔室厚度。密度越大、腔室厚度越大,则精子面密度越大,精子之间的距离也就越小。精子间距越小,则精子碰撞的概率越大,死精子越有可能被当成活精子,精子轨迹跟踪失误的概率也越大。同时精子间距越小,当精子间距小于精子在两帧时间间隔内的运动距离时,精子就很可能匹配错误。
5.帧率。帧率是摄像头指每秒钟获取的图像数量。帧率受限于曝光时间和摄像头的性能。在摄像头允许范围内,最大帧率=1秒/曝光时间。帧率越高,则相邻两帧中精子移动的距离就越小,越不容易将两个相邻的精子错配。
6.分析时长。精子运动轨迹是弯弯曲曲的,没有完全呈直线运动的。分析时间越长,则精子轨迹呈现的越全面,时间越短越不容易反映精子的实际轨迹。对于圆弧形运动或者转圈的精子来说尤其明显。当时间很短时,精子近似呈直线运动,随着时间延长,圆弧越来越明显,直线性越来越低,直到最后呈圆圈状。不同的轨迹计算出来的参数不同,也就影响到活力和活率的判定。
分析时长并不是越长越好,分析时间越长,精子轨迹交叉的概率越大,出错的概率也越大。并且分析时间越长意味着需要分析的帧数就越多,数据处理量越大,分析速率就越慢。
7.算法。各种参数和指标的定义,需要明确为计算公式和判定逻辑才能使计算机能够执行,但是具体参数和指标的定义公式、精子识别算法、跟踪算法等多个方面的内容细节都会有多种选择,并影响到结果。
(1)参数定义公式。VCL、VSL和MAD定义比较明确,计算方法基本一致,LIN=VSL/VCL,定义也因此是明确的,但这些指标受帧率和分析时长影响。
但VAP是指平均路径速率,具体采用哪种平均值或者拟合公式来代表平均路径各个厂家都不一样,并没有统一的计算公式。ALH、BCF、STR、WOB等参数都是在平均路径的基础上计算的,由于平均路径的计算方法没有统一的公式,这些参数也就没有统一的计算公式。并且VAP、ALH、BCF、STR、WOB也受帧率和分析时长的影响。
(2)指标定义。对于目测方法来说,前向精子是综合多个信息来判定的,不仅仅是精子呈前向运动,还有是不是主动运动而不是飘动的。但是怎样的精子算前向的,每个人都有自己的判定标准,并且是个模糊的标准。对于计算机就必须是明确的。
对于活力,可以从运动轨迹的曲率、线性、前向性、平均移动角度等一个或者多个方面进行判定。但是具体选择哪一个作为依据并没有标准。理论上这些指标都是可行的,并且都是相关的。
对于活率,精子运动到什么程度算活动的,以VCL、VSL还是VAP作为依据也是没有标准的,理论上这些指标都是可行的,并且也是相关的。
对于视野边缘的精子,肯定是有精子游入,也有精子游出,这些精子会改变视野中的精子数量,并且都是运动精子,对活力和活率有一定影响,因此是否考虑这些边缘位置的精子就会导致一定的误差。
对于密度,视野长度和宽度一般误差很小,但是腔室厚度误差比较大。对于标称10微米厚的玻片来说,如果加工误差1微米,则检测的密度将会因此产生10%的误差。对于标称20微米厚的玻片来说,如果加工误差1微米,则检测的密度也会因此产生5%的误差。
(3)精子识别。视野边缘的精子由于显示不全,会导致精子识别失误。这个概率为边缘区占总视野的面积比例,与精子大小以及视野总面积有关。精子越小,视野越大,则边缘精子识别误差越小。
杂质越多、图像质量越差,则识别出错的概率越大,识别误差也就越大。
(4)精子跟踪。最简单的跟踪方法是最小邻域算法,也就是将后一帧图像中与上一帧距离最近的精子认为是同一个精子,这样就可以将全部图像中的精子轨迹建立起来。很显然,这种算法没有考虑精子运动方向和路径交叉的情况。
由于精子运动不规则,构建精子实际路径,需要预测精子的运动方向,对精子运动方向有一定限制。在精子轨迹交叉时,精子图像重叠,此时还需要对重叠图像进行分割,否则会导致精子数量偏低以及轨迹断掉。
帧率越低,精子在帧与帧之间运动的距离就长,越容易被当成2个精子。分析时长越长,轨迹交叉的概率越大。因此帧率越低,分析时长越长,跟踪的误差就越大。
即使没有跟踪失误,要构建完整的轨迹最少需要几十帧的图像,在这段时间内肯定有精子游出和游入视野,而这两部分的精子都不会有完整的轨迹。如果采纳不完整轨迹的结果,则会有计算误差。如果不采纳不完整轨迹,则运动精子尤其是快速运动精子的比例将会降低。视野越小,精子运动越快,分析时长越长,这个影响就会越大。
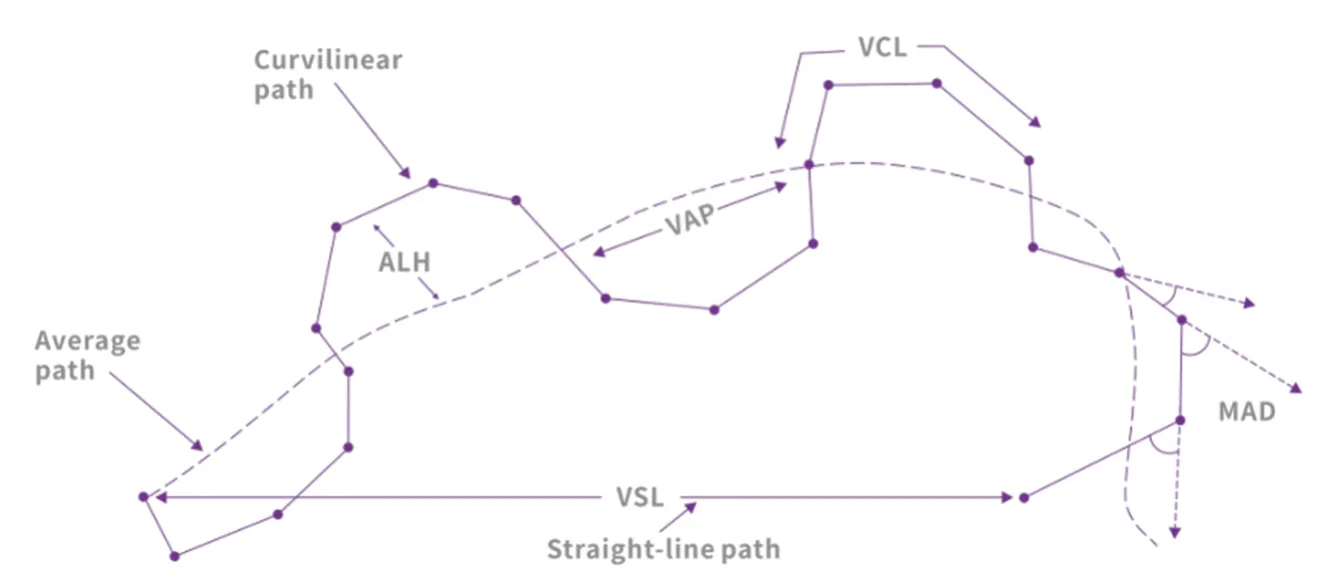
◎图 运动参数定义示意图
三、正确使用CASAS
不同厂家的CASAS,由于具体参数各不相同,不具备严格意义上的可比性。同一厂家的CASAS,由于参数设置不同得出的结论也不具备严格意义上的可比性。对于这些结果,由于都是对活力、活率进行检测,但是方法不同,可以认为它们是有相关性的不同指标,都能反映出精子的运动状态。
要正确使用CASAS,则应该熟悉CASAS的结构和原理,并掌握显微镜的调试使用方法、软件各项参数调好后尽量不动,起码不修改对结果有重要影响的帧率、分析时长、判定参数及其阈值。即便要修改,也应该在一个实验全部结束以后。
