全行驶状态下虚拟轨道列车的动载及道路友好特性
2022-07-06王承萍张济民周和超梅名苏陆海英
王承萍,张济民,周和超,薛 兆,梅名苏,陆海英
(1.同济大学铁道与城市轨道交通研究院,上海 201800;2.中车长客股份国家轨道客车工程研究中心转向架研发部,吉林 长春 130062)
虚拟轨道列车作为一种新型的城市轨道交通工具,兼具轨道车辆和道路车辆的双重属性,能够在一定程度上缓解因城市道路的饱和及居民生活水平要求的提高而导致的城市交通系统压力[1-3]。
学者们为探究车辆在不同运行状态下的振动特性和道路友好性开展了大量研究。Yin 等[4]构建了列车的三维动力学模型,评估了匀速、牵引和制动状态下的车辆振动特性。为探究城市重型公共汽车在匀速状态下的加速度振动特性,进而分析舒适性指标,Nguyen 等[5]在Matlab/Simulink 中开发了多自由度的汽车动力学模型,评估了路面等级对加速度振动特性的影响。李金辉等[6]构建了三轴带平衡悬架的汽车动力学模型和路面非平稳随机激励时域模型,对牵引和制动状态下重型汽车轮胎的动载特性进行分析。Zhou等[7]开发了一种半主动空气悬架系统的半挂汽车动力学模型,对匀速状态下的动载特性进行了分析。Nguyen等[8]提出了重型卡车的非线性动力学模型,以评估匀速行驶状态下重型卡车平顺性和道路友好性。刘祥银等[9]集成了一个双轮辙激励的空间域路面车辆动力学模型,对车辆轮胎的动载变化规律进行了计算和分析。刘大维等[10]创建了三维随机路面激励下的重型车辆动力学模型,以探究在三维空间域路面激励下的道路友好性。He等[11]利用Adams建立了半主动空气悬架车辆动力学模型来研究匀速状态下的道路友好性。
上述研究中,大部分研究是针对车辆在某一运行状态(匀速、牵引、制动)下的车辆振动特性或道路友好性进行研究,然而,将车辆运行状态与道路特点相结合来分析车辆振动特性和道路友好性的研究较少,且对运行状态的分析较为单一。为便于分析,将车辆在站间所历经的三种运行状态定义为全行驶状态,第一阶段为牵引阶段,以恒定的加速度使速度由零达到某一速度;第二阶段为匀速阶段;第三阶段为制动阶段,以恒定的减速度使速度减到零。由于虚拟轨道列车在固定的道路上单向运行,且车站间距较短,导致列车在站间运行时需要频繁的牵引、匀速、制动,即虚拟轨道列车在站间的各个运行状态与道路之间保持一一对应的关系。因此,对虚拟轨道列车在全行驶状态下的动载特性和道路友好性进行研究具有重要意义。
本文将运行道路和对应的运行状态相结合,对虚拟轨道列车在站间全行驶状态下的动载特性和道路友好性进行研究。基于动力学理论和达朗贝尔原理,在考虑轮胎-路面之间的相互作用和车辆之间的耦合作用的基础上,构建了随机路面激励下的虚拟轨道列车动力学模型,并对动力学模型进行了验证。通过数值计算,对牵引、匀速、制动状态下的动载特性和道路友好性进行分析,并探究运行速度、路面等级和加/减速度对动载特性和道路友好性的影响。
1 虚拟轨道列车三维动力学模型
为分析虚拟轨道列车在全行驶状态下的动载特性和道路友好性。基于车辆动力学理论、轮胎动力学理论及非线性动力学理论,考虑轮胎-道路之间的相互作用及车辆之间的耦合作用,搭建了三节编组的虚拟轨道列车动力学模型,如图1 所示。该动力学模型由三节车辆铰接而成,车辆之间通过具有刚度和阻尼的车钩装置连接;每辆车由车体和4 个轮胎构成,车辆和相应的轮胎之间通过具有刚度和阻尼的独立悬架装置连接;橡胶轮胎选取魔术公式模型[12]以描述其动态特性;为实现整车的全轮驱动,每个轮胎均安装有电机控制器。车辆沿着速度方向编号,分别命名为车辆1、车辆2、车辆3。车辆1的左侧轮胎编号为轮胎11和轮胎13,右侧轮胎编号为轮胎12 和轮胎14,其余车辆和对应轮胎的编号方式相同。
图1 中,Xc、Yc、Zc、ϕc、φc、βc分别表示车辆的纵向、横向、垂向、侧滚、摇头和点头;Xw、Yw、Zw、βw分别表示车轮的纵向、横向、垂向和点头;Mc、Mw分别表示车辆和车轮的质量;Icx、Icy、Icz分别表示车辆绕X、Y和Z轴的转动惯量;Iwy表示轮胎绕Y轴的转动惯量;Ksx、Ksy、Ksz分别表示独立悬架装置的纵向、横向和垂向刚度;Csx、Csy、Csz分别表示独立悬架装置的纵向、横向和垂向阻尼;Kcx、Kcy、Kcz分别表示车钩装置的纵向、横向和垂向刚度;Ccx、Ccy、Ccz分别表示车钩装置的纵向、横向和垂向阻尼;H为车辆质心与轮胎质心之间的垂向距离;BW为车辆质心与轮胎质心之间的横向距离;L为轮距的一半;Lcc为相邻车辆质心的纵向距离;v为行驶速度。i表示车体编号,为1,2,3;j表示车轮编号,为1,2,3,4。

图1 虚拟轨道列车动力学模型Fig.1 Virtual track train dynamics model
虚拟轨道列车共有15 个刚体,其中,车体具有纵向、横向、垂向、侧滚、摇头和点头6 个自由度,车轮具有纵向、横向、垂向和点头4个自由度,因此,虚拟轨道列车动力学模型具备66个自由度,,如表1所示。虚拟轨道列车的具体参数由项目合作方提供(见表2)。

表1 虚拟轨道列车动力学模型的自由度Tab.1 Degrees of freedom of virtual track train dynamics model

表2 虚拟轨道列车参数Tab.2 Parameters of virtual track train
根据达朗贝尔原理,车辆的动力学方程由式(1)—(6)给出。

车轮的动力学方程由式(7)—(10)给出。

式(1)—(10)中:Fxca、Fyca、Fzca分别为车辆之间的纵向力、横向力和垂向力;Fxwc、Fywc、Fzwc分别为车辆与轮胎之间的纵向力、横向力和垂向力;Fxcw、Fycw、Fzcw分别为车体对车轮纵向力、横向力、垂向力;Fxrw、Fyrw、Fzrw分别为道路对车轮纵向力、横向力、垂向力;Tr为道路对车轮的阻力矩;Ty为牵引或制动力矩。
2 考虑轮辙相干性的路面不平度
路面不平度通常采用功率谱密度函数来描述其统计特性,中国标准[13]将路面不平度分为A至H级,共8个等级。车辆运行时受到路面激励所产生的频率为f=vn,n为路面不平度的空间频率。根据轮胎与路面激励的时间频率范围(f1,f2),得到路面不平度功率谱密度的有效空间频率范围(n1,n2)。路面不平度功率谱密度函数表达式如下:

式中:n为空间频率,为波长的倒数;n0为参考空间频率,取n0=0.1 m-1;Gq(n0)为参考空间频率n0下的路面功率谱密度值,称为路面不平度系数;W为频率指数,一般取W=2;Gq(n)为功率谱密度。
文献[14]指出傅里叶逆变换法的速度更快、适应性更强、理论推导更为严谨,被认为是一种较为理想的模拟方法。因此,本文采用傅里叶逆变换法来模拟随机路面不平度,在此基础上,将左、右侧车轮相位角的相干性[15-16]纳入考虑,模拟路面不平度。图2 为B 级左、右侧路面不平度。图3 为B 级左、右侧功率谱密度函数与标准功率功率谱密度函数的对比(横纵坐标均为对数表达)。综上,路面不平度的模拟值与标准值拟合效果较好,验证了随机路面不平度模型的正确性。其他路面等级均可得到相同的结论。
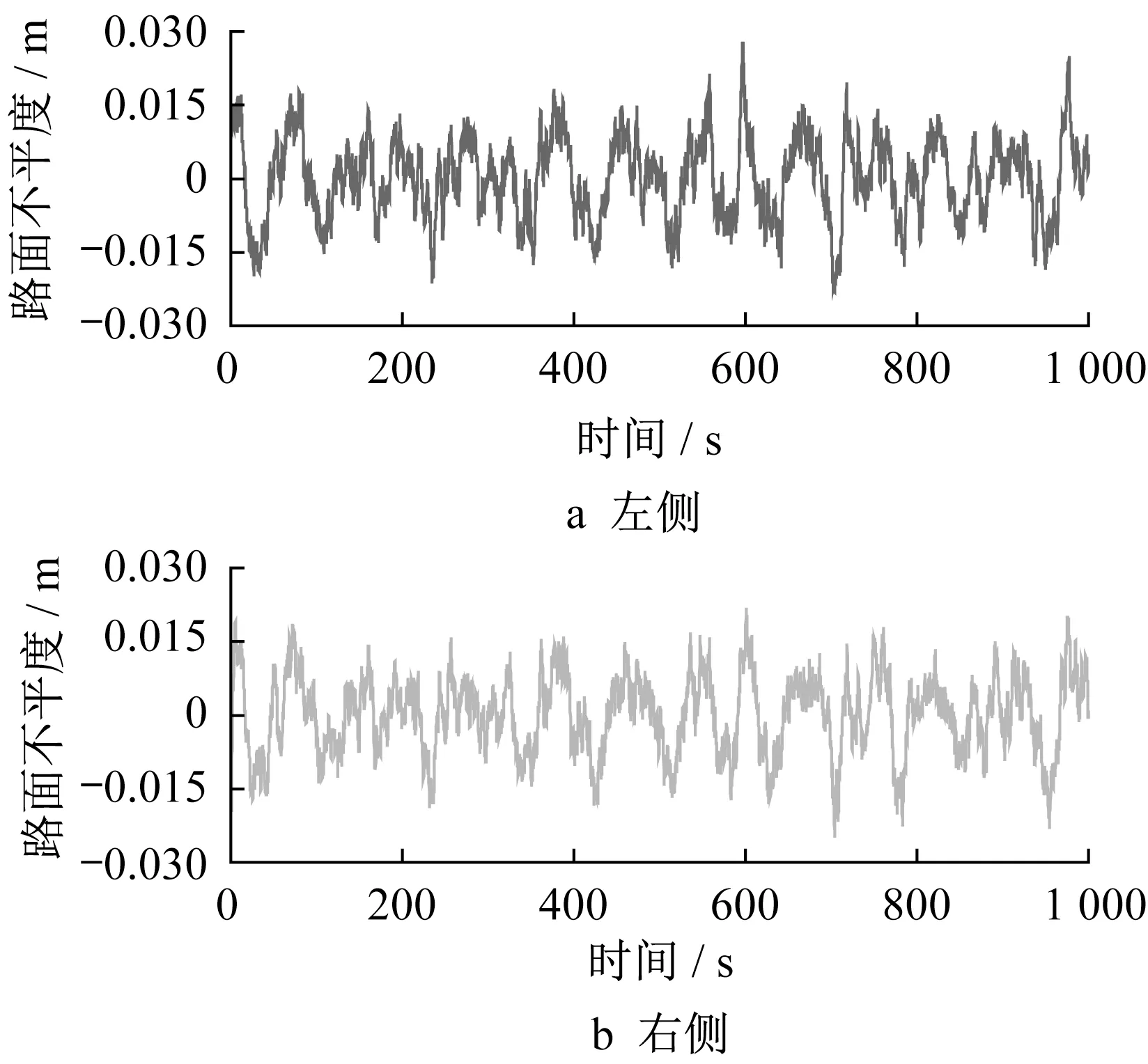
图2 B级路面不平度Fig.2 B-grade pavement

图3 B级路面功率谱密度Fig.3 Power spectral density of B-grade pavement
3 模型验证
采用无线加速度传感器对虚拟轨道列车的车辆1的垂向加速度进行测试,无线加速度传感器安装位置如图4所示。运行速度和路面不平度分别设为30 km·h-1和B 级以确保仿真计算与实际运行工况的一致性。

图4 加速度传感器安装位置Fig.4 Position of accelerometers
图5 给出了仿真和试验的垂向加速度时域响应。仿真与试验加速度的幅值变化范围均在-1 m·s-2~+1m·s-2。图6为仿真与试验的垂向加速度功率谱分析(横、纵坐标均取对数)。仿真与试验的垂向加速度振动频率主要集中在10 Hz 以内的低频范围内,且两者均在频率为1.996 Hz处出现能量峰值;高频区的数据主要是由于数值计算中引入的噪声数据,其能量很小,可以忽略不计。此外,由于仿真与试验的路面不平度存在差异,导致仿真结果与试验结果不完全一致。但仿真与试验的垂向加速度变化趋势吻合较好。由上述分析可知,无论是在时域还是在频域,仿真与试验垂向加速度总体变化趋势都拟合得较好。因此,从现场试验的角度验证了所建立的虚拟轨道列车动力学模型的正确性。

图5 试验与仿真的加速度时域曲线Fig.5 Vertical acceleration time-domain curve of test and simulation

图6 仿真与试验的加速度功率谱Fig.6 Vertical acceleration power spectral density for test and simulation
4 结果分析
动载特性主要选取各轮胎的垂向动载和纵向动载。道路友好性是指轮胎在路面上运行时,轮胎动载荷所导致的路面损伤程度。Cole和Cebon[17]在四次幂定律的基础上,考虑轮胎动载荷的空间重复性,提出95百分位四次幂和力来评估路面损伤程度,并将其定义为道路损伤系数J。道路损伤系数J的计算公式如下:

式中:Fw4为车轮动载荷的四次幂和力;σFw4为Fw4的标准差;mFw4为Fw4的均值。
4.1 全行驶状态
站间全行驶状态主要包括三个状态(按顺序描述):第一阶段为牵引阶段,加速度为+2 m·s-2,速度从0 加速到70 km·h-1;第二阶段为匀速阶段,速度为70 km·h-1;第三阶段为制动阶段,减速度为-2 m·s-2,速度从70 km·h-1减速到0。路面等级设置为B 级,路面滚动阻力系数和地面附着力系数的设置见文献[18]。轮胎动载荷是轮胎垂向载荷减去其均值得到。为便于分析,均选取右侧轮胎进行分析,左侧轮胎变化趋势类似。
从图7 可知,车辆在0~9.44 s 内由0 匀加速到70 km·h-1;在9.44~19.44 s 内保持70km·h-1的速度匀速运行;在19.44~28.88 s内由70 km·h-1匀减速到0。由于虚拟轨道列车采用全轮驱动的方式,在各运行状态下,各个轮胎的纵向力趋于定值。其中,牵引与制动状态下的纵向力大小相等,方向相反,绝对值为8.3 kN,匀速状态下纵向力趋近于零。

图7 全行驶状态下的纵向力Fig.7 Longitudinal force in full running conditions
全行驶状态下各轮胎的垂向动载荷均方根值如表3所示。在列车惯性作用下,牵引状态下,轮胎12的垂向动载荷均方根值最大,制动状态下,轮胎34的垂向动载荷均方根值最大。除轮胎12 和轮胎34外,垂向动载荷均方根值在匀速状态大于牵引、制动状态,牵引和制动状态差异不明显。

表3 全行驶状态的垂向动载荷均方根值Tab.3 Root mean square of vertical force in full running conditions kN
图8表明了整车在全行驶状态下的道路损伤系数。其中,相较于牵引与制动状态,匀速状态下的道路损伤系数更小,牵引与制动状态下的道路损伤系数差异较小。由此表明,匀速状态下的道路友好性优于牵引状态和制动状态,而牵引和制动状态的道路友好性相似。

图8 全行驶状态下的道路损伤系数Fig.8 Road damage coefficient in full running conditions
4.2 匀速状态
虚拟轨道列车在匀速状态下的动载特性和道路友好性同运行速度、路面等级密切相关。探究运行速度的影响时,运行速度分别设置为10、30、50、70 km·h-1,路面等级为B 级;探究路面等级的影响时,路面等级分别设置为A 级、B 级、C 级,运行速度为70 km·h-1。
由图9 可以看出,运行速度的增加将诱发车辆各部件的剧烈振动,使得轮胎垂向力的增加,从而导致垂向动载荷均方根值增大。当运行速度由10 km·h-1增加到70 km·h-1时,垂向动载荷均方根值最大增大了2.4 倍。由图10 可以看出,路面等级的降低代表路面激扰的增大,使车辆各部件振动加剧,进而导致垂向动载荷均方根值增大。当路面等级由A级降低到C级时,垂向动载荷均方根值最大增大了6.8倍。此外,结合图9 和图10 可知,轮胎12 和轮胎34垂向动载荷均方根相差较小,与此变化趋势类似的还有轮胎14和轮胎32、轮胎22和轮胎24,垂向动载荷的均方根值在匀速状态下关于列车中心呈对称分布的现象。由于车辆1 和车辆3 在纵向方向几何中心与重心之间存在偏差,且重心位置靠近轮胎12和轮胎34,各轮的垂向动载荷均方根值的分布规律有:轮胎14和轮胎32最大,轮胎22和轮胎24次之,轮胎12和轮胎34最小。
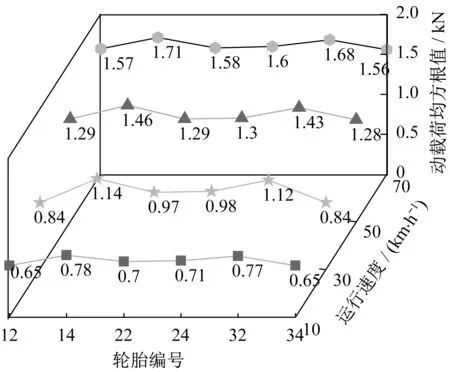
图9 匀速状态下运行速度对垂向动载荷均方根值的影响Fig.9 Effect of running speed on the RMS of vertical dynamic load in uniform condition

图10 匀速状态下路面等级对动载荷均方根值的影响Fig.10 Effect of road grade on the RMS of vertical dynamic load in uniform condition
图11 表明了匀速状态下运行速度和路面等级对道路损伤系数的关系。路面等级的降低和运行速度的增加将导致道路损伤系数的增大。当运行速度为70 km·h-1时,面等级由A 级下降到C 级,道路损伤系数从1.65 增加到1.86,增加了12 %。当路面等级为C级时,道路损伤系数在70 km·h-1时相较于10 km·h-1时增大8%。

图11 匀速状态下运行速度和路面等级对道路损伤系数的影响Fig.11 Effect of running speed and road grade on road damage coefficient in uniform condition
4.3 牵引/制动状态
根据4.1节的结果可知牵引与制动状态下的动载特性和道路友好性比较相似。以牵引状态为例,探究加速度的影响时,加速度分别设置为1、2、3、4 m·s-2,路面等级为B级;探究路面等级的影响时,路面等级分别设置为A级、B级、C级,加速度为2 m·s-2。
牵引状态下加速度与垂向动载荷的关系如图12所示,垂向动载荷均方根值随着牵引加速度的增加而增大,4 m·s-2下的动载荷均方根值比1 m·s-2下的增加约2倍。路面等级与垂向动载荷均方根值的关系如图13所示,垂向动载荷均方根值随着路面等级的降低而增大,C 级路面激励下的动载荷均方根值比A 级路面激励下的增加约5 倍。此外,由于相邻车辆在纵向方向的相互耦合作用,致使垂向动载荷均方根值在各轮的分布规律与匀速状态有所区别,具体表现在:轮胎12 和轮胎34 最大,轮胎14 和轮胎32、轮胎22和轮胎24较为接近。

图12 牵引状态下加速度对垂向动载荷均方根值的影响Fig.12 Effect of acceleration on the RMS of vertical dynamic load in traction condition

图13 牵引状态下路面等级对垂向动载荷均方根值的影响Fig.13 Effect of road roughness on the RMS of vertical dynamic load in traction condition
图14显示了牵引状态下加速度、路面等级与道路损伤系数的关系。道路损伤系数与加速度呈现正相关,即道路损伤系数随着加速度的增加而增加。其中,路面等级为C 级时,加速度由1 m·s-2增加到4 m·s-2时,道路损伤系数增长25%。道路损伤系数与路面等级呈现负相关,即道路损伤系数随着路面等级的降低而增加。当加速度为4 m·s-2时,C级相较于A级,道路损伤系数增加了11%。

图14 牵引加速度和路面等级对道路损伤系数的影响Fig.14 Effect of acceleration and road grade on road damage coefficient
5 结论
本文对全行驶状态(牵引、匀速、制动)下的虚拟轨道列车的动载特性和道路友好性进行探究,根据理论分析和数值推导,构建了虚拟轨道列车动力学模型,并对该动力学模型进行了验证,并评估了关键因素对动载特性和道路友好性影响。结论如下:
(1)车轮纵向力在牵引与制动状态下大小相等,方向相反,在匀速状态下趋于零。由于列车的惯性作用,牵引时,车辆1前轴的垂向动载荷均方根值最大,而制动时车辆3后轴的最大。
(2)道路友好性在匀速状态下明显优于牵引和制动状态,牵引和制动状态下的差异较小。运行速度和加速度/减速度的增加、道路等级的降低均会使道路友好性变差。
(3)运行速度和加/减速度的增加、路面等级的降低均会导致列车更加剧烈的振动,使垂向动载荷增大。垂向动载荷均方根值与运行速度、加/减速度均呈正相关,与路面等级呈负相关。
(4)匀速状态下各轴的垂向动载荷均方根值关于列车中心对称,且变化规律为轮胎14和轮胎32最大,轮胎22和轮胎24次之,轮胎12和轮胎34最小。
