一种装卸作业机械手结构设计
2022-07-05喻志杰
喻志杰
(长安大学工程机械学院,陕西 西安 710064)
0 引言
装卸活动[1]的基本动作包括装车(船)、卸车(船)、堆垛、入库、出库以及连接上述各项动作的短程输送,是随运输和保管等活动而产生的必要活动。在物流过程[2]中,装卸活动是不断出现和反复进行的,它出现的频率高于其他各项物流活动,每次装卸活动中花费的时间,往往成为决定物流速度的关键。装卸活动所消耗的人力也很多,所以装卸费用在物流成本中所占的比重也较高,以我国为例,铁路运输的始发和到达的装卸作业费大致占运费的20%左右,船运占40%左右[3]。因此,为了降低物流费用,优化装卸是个重要环节。此外,进行装卸操作时往往需要接触货物,此过程是造成货物破损、散失、损耗、混合等损失的主要环节,例如袋装水泥纸袋破损和水泥散失主要发生在装卸过程中,玻璃、机械、器皿、煤炭等产品在装卸时最容易遭受损失[4]。由此可见,装卸活动是影响物流效率[5]、决定物流技术经济效果[6]的重要环节。
传统的装卸机械手[7-8],大多数都是只适用于一定范围的物品装卸,无法做到对多种物品进行装卸,这会使得在对不同物品装卸时需要用到不同的设备,给物品装卸带来麻烦[9]。基于此,笔者设计了一种新型的装卸作业机械手来解决上述问题,保证装卸作业时的高效性[10-11]。
1 结构设计
1.1 设计要求
为了实现机械手装卸作业高效率、高质量,装卸作业机械手的设计应满足以下设计要求:
1)机械手可以快速地更换不同设备来装卸不同的物品;
2)机械手在工作过程中无磨损;
3)机械手在工作过程中可以稳定地装卸;
4)机械手能循环使用;
5)机械手不会对物品造成损伤。
1.2 设计方案
装卸作业的常用方式有气力输送装卸搬运、重力装卸搬运、机械装卸搬运等。第一种耗费的人力物力财力太大,不适用于装卸作业;第二种适用于装卸大型重量级的物品;第三种适用范围较广,方法简单,成本较低。比较这几种装卸作业方式之间的特点,考虑到装卸作业的适用范围和成本等因素,笔者拟借鉴机械手的方法进行相关设计。装卸作业机械手就是使用机械手夹持不同的设备来对不同的物品进行装卸,这样不仅能提高工作效率,同时还能应用在更多的装卸场合[12]。
基于机械手的基本原理,笔者在机械手的基础上进行一定程度的改进,在满足上述设计要求的基础上,参考现有的一些机械手模型,设计了一种对不同物品都能装卸的装置[13]。
该装置整体呈一个夹子结构,夹子结构的顶端是连接头和连接杆,连接杆的底部固定连接箱,连接箱上开有滑槽,滑槽的内侧壁滑动连接左右机械夹。机械夹的一侧与异型齿轮通过弧形槽连接,另一侧与复位弹簧连接,复位弹簧固定在连接箱内壁上,连接箱内还有限位杆,限位杆的外侧壁与左右机械夹的侧壁贯穿滑动连接。在工作箱内螺纹杆与齿轮啮合连接,齿轮与转杆固定连接,转杆贯穿连接箱与工作箱,转杆的底端固定连接异型齿轮。其中装卸作业机械手的正面剖视结构示意图如图1 所示,装卸作业机械手在图1 中A 处放大结构示意图如图2 所示,装卸作业机械手的异型齿轮与左机械夹连接处顶部俯视结构示意图如图3 所示,装卸作业机械手的齿轮与螺纹杆顶部俯视结构示意图如图4 所示。图中:1 为连接头,2 为连接杆,3 为连接箱,4 为左机械夹,5 为右机械夹,6 为复位弹簧,7 为异型齿轮,8 为滑槽,9 为工作箱,10 为螺纹杆,11 为齿轮,12 为转杆,13 为限位杆。
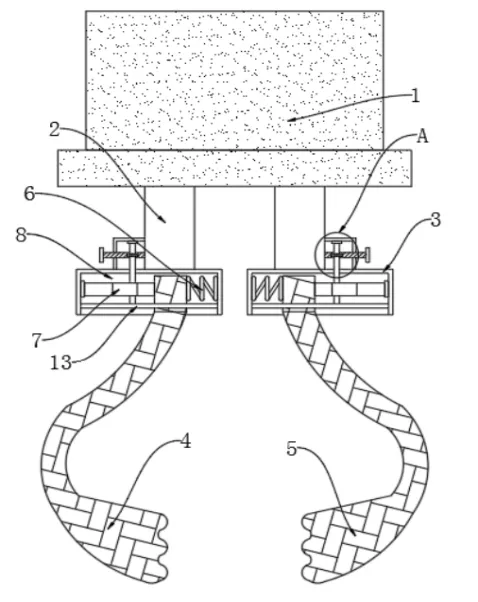
图1 装卸作业机械手的正面剖视结构示意图

图2 装卸作业机械手在图1 中A 处放大结构示意图
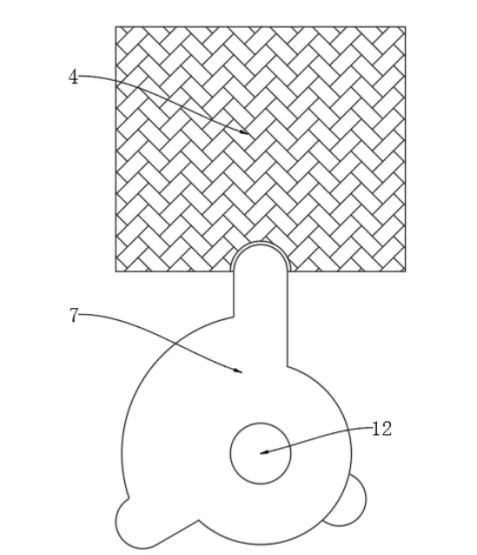
图3 机械手的异型齿轮与左机械夹连接处顶部俯视结构示意图
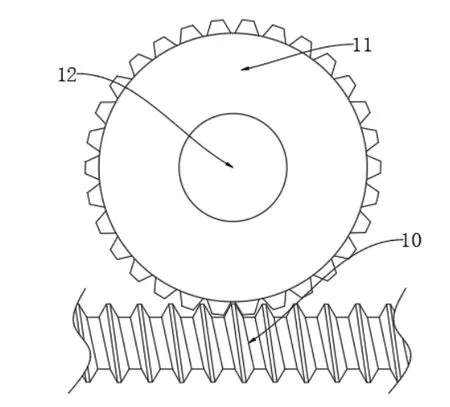
图4 机械手的齿轮与螺纹杆顶部俯视结构示意图
笔者所设计的装卸作业装置是由一个机械手搭配不同设备的集合体,具有十分优越的工作性能,且操作简单方便,成本低廉,其具体优越性如下:
1)满足不同物品的装卸;
2)机械手更换不同设备简单高效;
3)不会对物品造成损伤;
4)机械手可以循环使用,满足实际情况需求。
2 结构分析
该机械手通过螺纹杆、齿轮和转杆配合使用。当需要对左机械夹和右机械夹进行间距调整时,通过转动螺纹杆带动与螺纹杆相互啮合的齿轮转动,带动与齿轮内侧壁贯穿固定连接的转杆转动,实现调整左机械夹和右机械夹的间距,使得该装置能适用于不同物品的装卸作业,扩大了该装置的适用范围[14]。
本实用新型装置通过异型齿轮、限位杆、复位弹簧和滑槽的配合使用,在调整左机械夹和右机械夹间距时,通过异型齿轮的转动,使得异型齿轮的不同齿牙与机械夹的外侧壁相互啮合,进而调整左、右机械夹的间距,在调整过程中通过复位弹簧进行弹性夹紧,防止机械夹的松动,提高了机械夹的稳定性。
3 实施方式
该装置在使用时首先通过转动螺纹杆,螺纹杆的转动带动与螺纹杆外侧壁相互啮合的齿轮转动,带动与齿轮内侧壁贯穿固定连接的转杆转动,进而带动与转杆外侧壁贯穿固定连接的异型齿轮转动,最后使得与异型齿轮连接的左右机械夹在连接箱的滑槽内左右滑动,实现异型齿轮对左机械夹和右机械夹的间距调整,扩大了该装置的适用范围,使该装置能够装卸更多的物品。复位弹簧的弹性可以对机械夹进行加紧固定,避免机械夹的松动给装卸作业带来麻烦。
4 结论
综上所述,笔者设计了一种应用于装卸作业的机械手新型装置,该装置能适用于不同物品的装卸作业。该机械手通过螺纹杆、齿轮和转杆的配合使用,实现对左机械夹和右机械夹的间距调整,使得该装置能适用于不同物品的装卸作业,扩大了该装置的适用范围。同时通过异型齿轮、限位杆、复位弹簧和滑槽的配合使用,防止机械夹的松动,提高了机械夹的稳定性。笔者设计的机械手装置能够实现装卸作业的高效率、高稳定性,解决了现有装卸作业过程中存在的技术难题,具有很高的实际应用价值。
