武汉市CORS 坐标时间序列中共模误差分析
2022-07-04王力斌潘鹏飞
王力斌,潘鹏飞,薛 蛟
(1. 武汉市测绘研究院, 湖北 武汉 430022)
近年累积的GNSS 参考站坐标时间序列,为大地测量学及地球动力学研究提供了宝贵的数据基础。然而,GNSS 数据处理过程涉及到众多因素的影响,所得的坐标时间序列中难免存在着多种误差[1]。其中,在GNSS坐标时间序列中包含了一种空间相关的误差,称之为共模误差(common mode error)[2-5]。剔除武汉CORS参考站坐标时间序列中的共模误差,不但有助于获得测站准确的位置和速度,解释板块构造运动,建立和维持武汉2000坐标系,而且还能更好地研究地球动力学过程,具有重要的理论意义及应用价值[6-7]。
1 共模误差的计算方法
1.1 残差时间序列的获取
为了得到观测值残差的时间序列,采用正弦、余弦函数描述测站的年周期、半年周期变化,将坐标分量每日解观测序列建模[8]:
式中,t为日坐标解历元,以年为单位;a为测站位置;b为线性速度;c,d为测站的年周期运动;e,f为半年周期运动;为跳变改正项;gj为跳变振幅;Tgj为发生跳变的历元;ng为跳变个数;H为海维西特阶梯函数,在突变前H值为0,发生突变后H值为1;vi为观测值残差。初次模型参数求解完成后,采用相关算法对拟合残差v̂进行分析剔除粗差影响。然后对剔除粗差的观测数据重建模,求得净化的残差时间序列。
1.2 区域叠加滤波算法
区域叠加滤波算法是目前广泛采用的计算共模误差的方法。假设共模误差在某一区域分布均匀,从单日坐标残差ε来计算共模误差的校正值[9]。
式中,d为时间;S为站台数目。从原始GNSS观测值中减去共模误差校正值得到滤波后的坐标时间序列。
1.3 相关系数叠加滤波
相关系数叠加滤波引入了相关系数作为权重因子,以某一个基准站为单位,分别计算所有测站对其产生的共模误差[10]:
式中,εi为第i个台站的共模误差值;s为参与计算共模误差的台站个数;vj,k和σ2j,k分别为第i个台站某一位置分量第k天的残差和误差;ri,j为站i和站j该分量残差坐标时间序列间的相关系数;rmin为阈值,即参与共模误差计算的台站与当前台站的相关系数需要大于rmin,通常取值r值为0.3。
2 武汉CORS共模误差分析
2.1 武汉CORS站空间相关性分析
本文选取了时间序列跨度基本相同、相同历元数多的6 个武汉CORS 观测网络基准站进行分析,分别为WHDH、WHHN、WHHP、WHKC、WHXZ。各基准站坐标时间序列的时间跨度均从2005—2015年,历元数为2 700 左右。图1~3 分别显示了6 个武汉CORS基准站N、E、U方向坐标时间序列,基准站坐标时间序列在N、E、U方向存在较为明显有规律的非线性变化,且测站之间存在显著的相关性。

图1 武汉CORS坐标时间序列N方向相关性
2.2 空间叠加滤波
以6 个武汉CORS 基准站残差坐标时间序列为研究对象,分别采用区域叠加滤波算法计算共模误差。经空间叠加滤波后,各基准站残差坐标时间序列的相关性平均降低60.32%,其中WHHN 站降幅最大,达到77.80%。空间叠加滤波能够有效地提取武汉CORS残差坐标时间序列中的共模误差,降低观测站之间的相关性。表1反映了WHHN站经空间叠加滤波前后的相关系数。
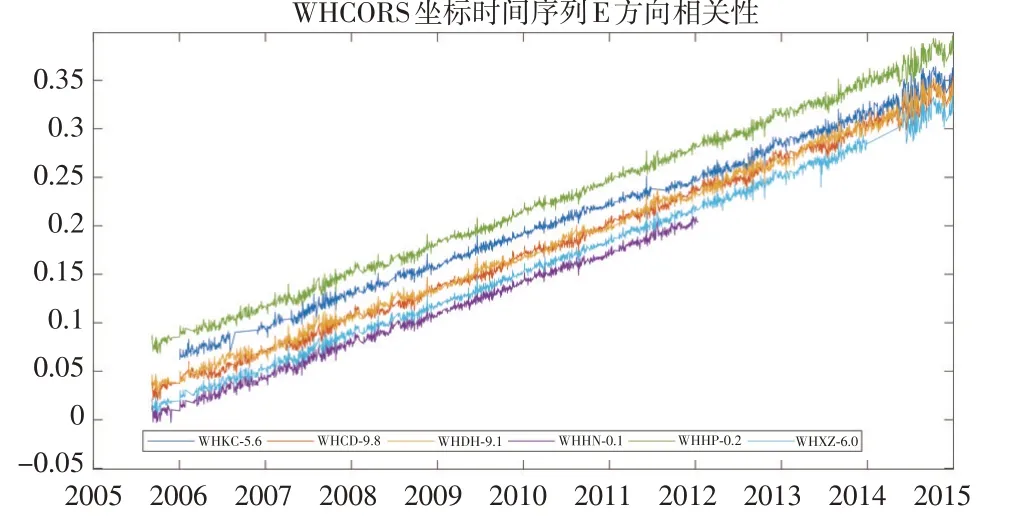
图2 武汉CORS坐标时间序列E方向相关性
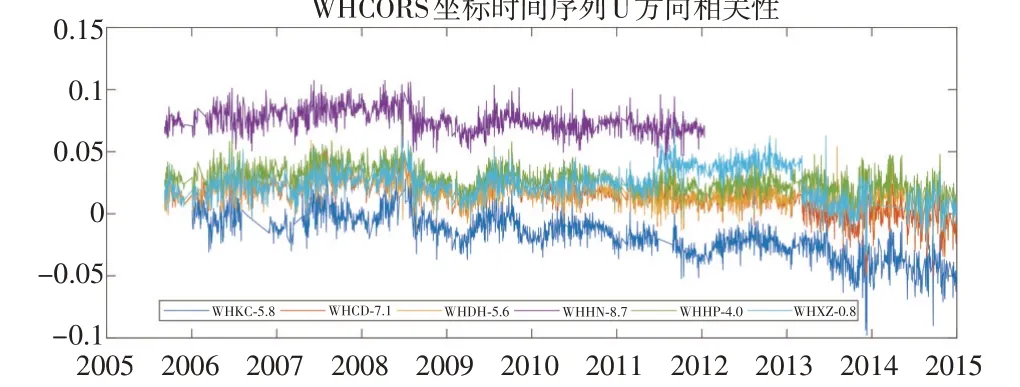
图3 武汉CORS坐标时间序列U方向相关性

表1 WHHN基准站残差坐标时间序列滤波前后相关系数对比
为了进一步证实空间叠加滤波在小空间尺度GPS观测网中的可行性,分别计算了空间叠加滤波前后各基准站N、E、U分量残差坐标时间序列的均方差,如表2所示。经过空间叠加滤波,测站N、E、U方向坐标时间序列标准差均有显著地降低,其中N方向平均减少50.99%,E方向平均减少50.64%,U方向平均减少41.65%。
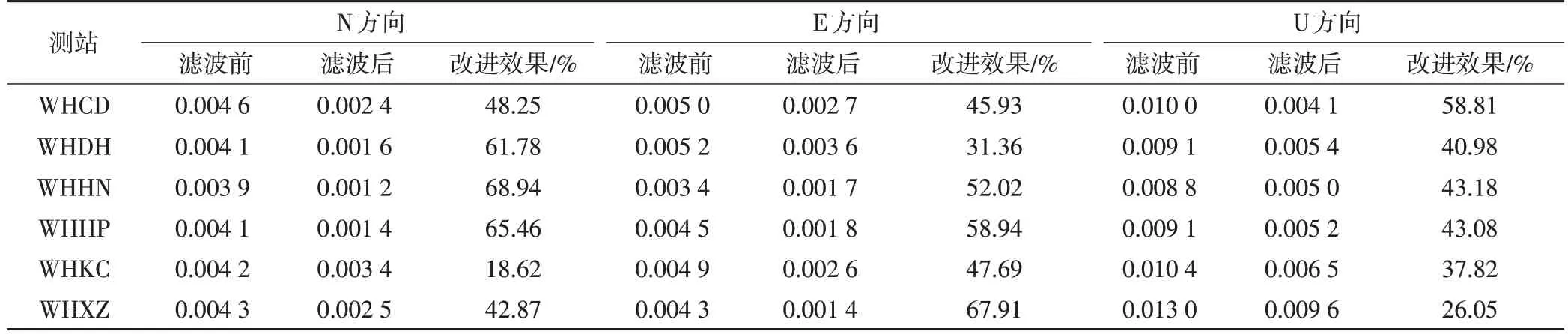
表2 空间叠加滤波前后残差坐标时间序列标准差
2.3 相关系数叠加滤波
以6 个武汉CORS 基准站残差坐标时间序列为研究对象,分别采用相关系数叠加滤波算法计算共模误差。经相关系数叠加滤波后,各基准站残差坐标时间序列的相关性平均降低62.77%,其中WHHN 站降幅最大,达到71.39%。相关系数叠加滤波能够有效地提取武汉CORS 残差坐标时间序列中的共模误差,降低观测站之间的相关性(如表3)。
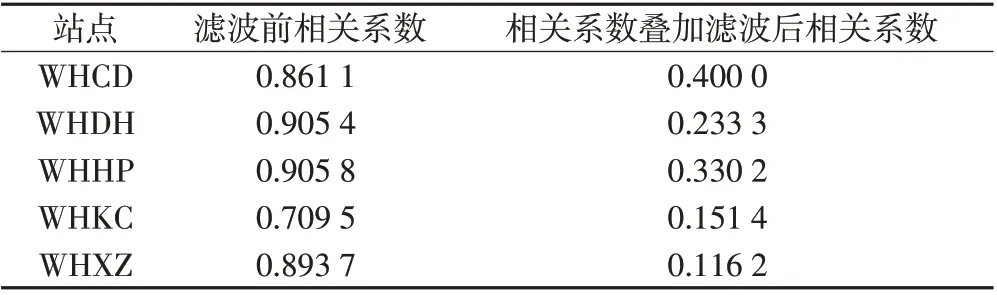
表3 WHHN基准站N方向残差坐标时间序列滤波前后相关系数对比
表4 分别计算了相关系数叠加滤波前后,各基准站N、E、U分量残差坐标时间序列的均方差。经过相关系数叠加滤波,测站N、E、U方向坐标时间序列标准差均有显著地降低,其中N 方向平均减少52.18%,E 方向平均减少51.60%,U方向平均减少43.08%,基准站坐标时间序列的精度较空间叠加滤波进一步提高。
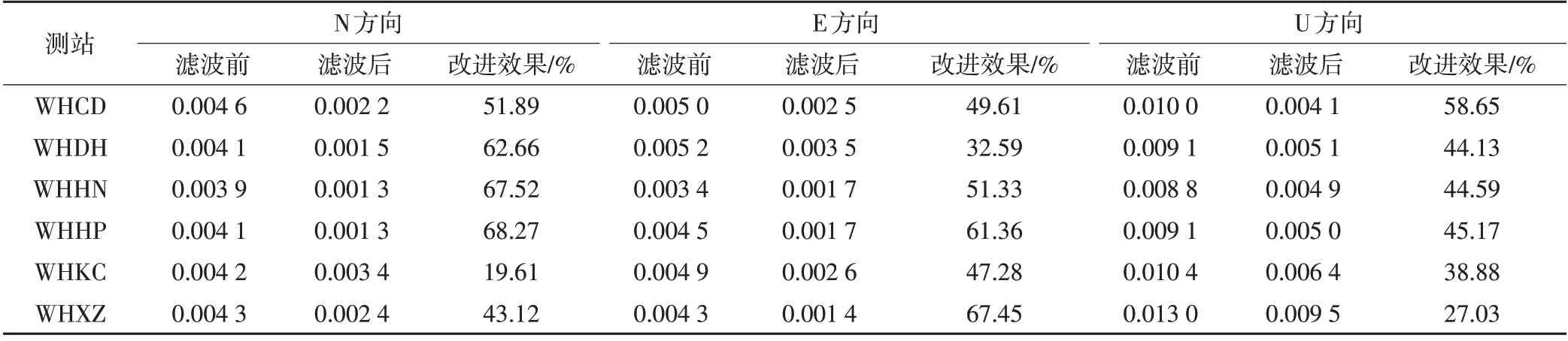
表4 相关系数叠加滤波前后残差坐标时间序列标准差
3 结 论
基于武汉CORS 单日解坐标时间序列数据,考虑测站的线性变化、年周期变化、半年周期变化、跳变等因素,实现了武汉CORS坐标时间序列的数据建模。将武汉CORS6个基准站的坐标时间序列数据根据时间进行排列,根据折线图可以观察到测站之间存在显著的相关性,直观地表明了测站之间存在共模误差的影响。将空间叠加滤波算法以及相关系数叠加滤波算法进行比较,分别计算2 种算法滤波前后残差坐标时间序列的相关系数以及滤波前后残差坐标时间序列的标准差大小。结果表明,2 种方法均能有效剔除武汉CORS 坐标时间序列中共模误差的影响,相关系数叠加滤波算法的效果略优于空间叠加滤波算法。
