基于无人机倾斜摄影的农房占地面积测量研究
2022-07-04丁立法张振海
丁立法,张振海,陈 鹏
(1. 黑龙江省第六地质勘查院,黑龙江 佳木斯 154000)
目前,无人机在许多领域广泛应用,能有效解决农房补充调查过程中所存在的多种问题,极大地降低了农房占地面积测量的误差。基于此,设计一种基于无人机倾斜摄影技术的农房占地面积测量方法[1-2]。
1 农房占地面积测量方法设计
1.1 布设像控点
在进行无人机航测之前,需要先选定像控点。由于像控点的选取会直接影响到测量精度,因此选择的像控点需要在保证方便外业实地观测的同时,也要保证空三加密的精度。在布设像控点时,一般设定在相邻像片重叠区域内,且保证像控点距像片边缘应大于150像素[3]。根据相关规范的要求,不同比例尺下像控点布设参数需要满足表1。
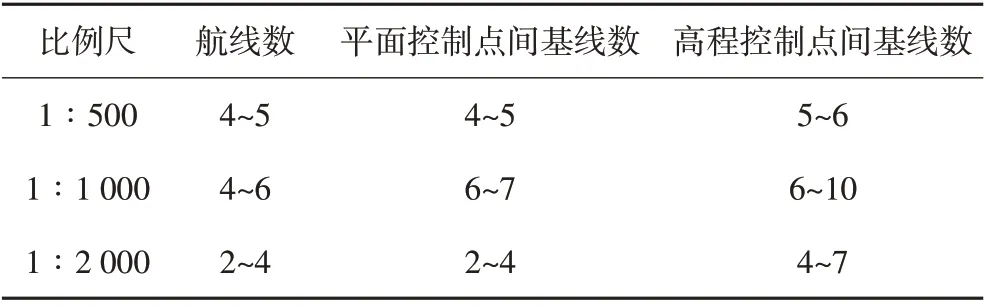
表1 不同比例尺下像控点布设参数
以表中的数据作为参考,调整比例尺与布设像控点,以便像控点能够在无人机倾斜影像中清晰显示,方便测量后期的刺点与判别,但是在此过程中需要注意避免在阴影与可被遮挡的区域进行布点[4]。如果是在地势较为平坦或高程变化较小、无植被覆盖的区域,可以选择在此布设高程控制点;如果在高程变化较大的情况下,例如斜坡的陡坎与土堆不能作为高程控制点布点的目标[5]。在像控点布设过程中,首先对区域网进行划分,在此过程中需要考虑到被测地区的地形地貌特征,还应注意无人机成图的比例尺,还需考虑到成像分辨率和规划好的无人机航拍区域划分等。区域网的划分形状最好以正方形和矩形为主,相邻的区域网航线至少需要4条重复基线,旁向相邻区域网至少需要2条,以降低后续农房占地面积测量误差[6]。
1.2 无人机图像特征提取与匹配
在利用无人机倾斜摄影得到的图片中,常见的特征主要包括点、线、面等,点特征相对稳定,也是特征提取与匹配过程中常用的特征。一般情况下,研究人员将灰度图像中像素周边突变的点作为特征点[7-8],这些点一般会是图像拐点以及交叉点等。本文在特征提取与匹配的过程中采用二进制的特征算子,以降低SIFT描述子的维度,有效提高计算速度。在特征提取过程中,要构建图像尺度空间,如下式所示:

式中,L(x,y,σ)为图像尺度空间;G(x,y,σ)为高斯函数;I(x,y)为原始图像;*为卷积运算;σ为尺度因子。当σ较大时,能够突出图像的一般特征,σ较小时能够突出图像的细节特征,高斯差分空间可以通过尺度空间经过差分运算得到,当2 个尺度空间的比例因子的值为k时,那么为了生成高斯差分金字塔,其过程如下:

高斯差分金字塔生成过程如图1所示。
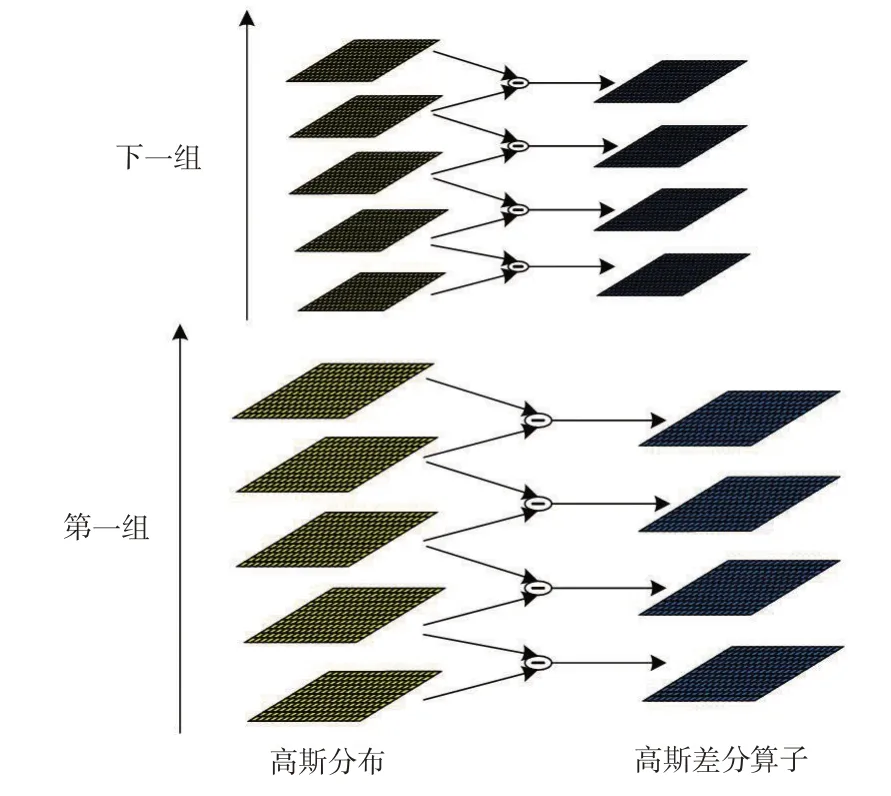
图1 高斯差分金字塔生成示意图
利用高斯金字塔检测出的关键点所在的像素梯度与方向分布,并将所有的关键点及其周围的像素点以向量的方式描述出来[9]。在此基础上,需要在关键点的尺度空间中对周围邻域进行划分[10],并将坐标轴作为关键点的主方向,将采样点分配到相应的子区域中,完成图像特征匹配。
1.3 三维建模与测量实现过程
构建民房三维模型是精准测量其占地面积的前提,因此本文对无人机倾斜摄影测量的实景模型构建方法进行研究[11]。首先采用平面模板标定法对相机进行标定,在此过程中需要使用相机拍摄一系列特定的图像,并将这些特定图像称为标定模板[12]。
利用无人机所带的倾斜相机,将拍摄到的图像按照上述的棋盘式标定模板进行排列,通过标定算法计算能够得到相机的几何模型,为后续的图像畸变矫正等处理过程提供参数[13]。通过公式推导获取到相机镜头参数的初始值后,对其单应性矩阵进行计算,单应性矩阵可以表示为:

矩阵中的h1、h2、h3分别为矩阵H的列向量,计算公式如下式所示:

式中,K为内参矩阵,r1、r2、r3为世界坐标系相对于摄像机坐标系的旋转矩阵的项,也称为外参矩阵项[14]。通过无人机影像在布设的像控点完成无人机倾斜摄影图像采集,根据特征的提取与匹配结果对影像畸变进行校正,以扩大图像灰度值的动态变化范围[15],对影响区域网进行联合平差,这是建模的关键步骤,得到外方位元素与稀疏的三维点云,如图2所示。

图2 拍摄位置与稀疏点云示意图
由于上述得到的稀疏三维点云地物过于粗糙,要使图像光滑平缓,还需要进一步对其进行处理得到稠密三维点云。根据几何约束与亮度相关性进行图像进行匹配,并计算匹配强度。当匹配强度较大时,两点的相似度比较高,说明周围具有潜在匹配点,通过多次匹配之后完成稠密三维点云建模,在此技术上通过投影矩阵计算出三维坐标,完成农房面积测量。
2 实验设置与结果分析
2.1 实验区选择
为了验证本文设计的基于无人机倾斜摄影技术的农房占地面积测量方法的有效性,需要进行大量的现场实验。本次农房占地面积测量试点区域选择黑龙江省双鸭山市宝清县七星泡镇及附近的兴华村和民主村,面积约为7 km2。七星泡镇位于宝清县西北部,省道205 从镇中经过,交通便利,同时附近的兴华村及民主村距离七星泡较近,可一并纳入农房占地面积测量工作计划中,该地区房屋情况复杂,满足试点工作需要,选择的实验区域如图3所示。

图3 实验区域遥感图像
实验中选择的无人机系统为成都纵横公司生产的大鹏CW-10型,该型号无人机翼展为2.6 m,长度1.6 m,操作简单,全自主飞行,垂直起降,实用升限大于等于4 000 m,最高起飞海拔3 500 m,具有防风与防水功能。该无人机采用一机多用任务舱设计,可配备MG-200S双光吊舱或JR503五镜头倾斜摄影相机,可根据任务需求,实时更换任务舱,同时使用全新电源管理模块,续航可达90 min,最大起飞重量为12 kg,任务载荷为2 kg,最大飞行空速为72 km/h。
2.2 布点及三维建模
本文实验中布设的控制点和检查点共两组,第一组在实验区域地面,共25个测点,用于构建三维模型和评估测量误差;第二组在农房建筑外表面,共98个测点,用于构建精细化模型和评估测量误差。第一组的测点均匀分布在300 组的测点均的实验区域,并埋设不锈钢测量标志,如图4所示。

图4 测量标志
根据均匀布点的原则,且为了保证实验结果的可靠性,选择4 种建模方案,分别选择其中3、6、9、12个测点作为控制点,将其均匀分布在实验区内,其余的点则作为检查点,分布如图5所示。
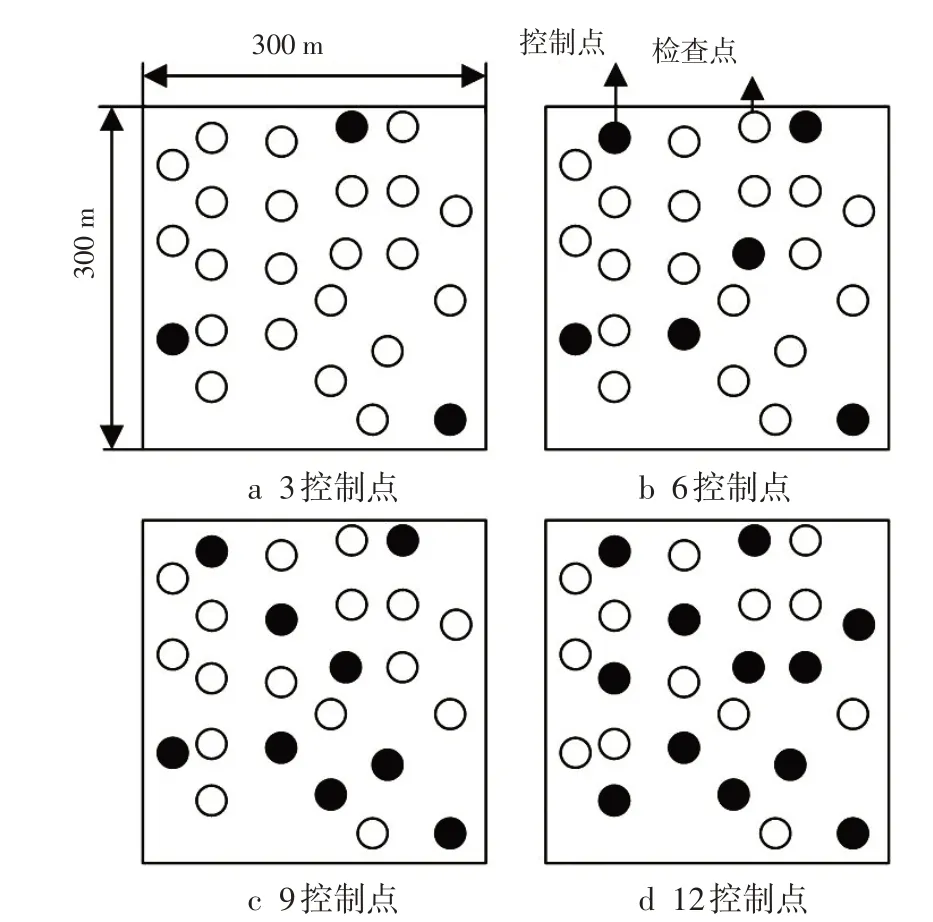
图5 实验区控制点与检查点的布设方案
第二组的测点分布在农房建筑的外表面上,按照不同高度分层布置。
2.3 实验结果分析
在上述测区进行占地面积测量,为了验证本文方法的有效性,将文献[1]方法与文献[2]方法作为实验对比方法,测试不同方法的覆盖率以测量误差。
1)覆盖率测试。采用3种方法进行测量覆盖率测试,其中部分覆盖率测试结果如图6所示。
分析图6 可知,与文献[1]、[2]相比,本文方法在测量过程中覆盖率较高,基本实现了全覆盖,能够为后续农房占地面积精准测量奠定基础。
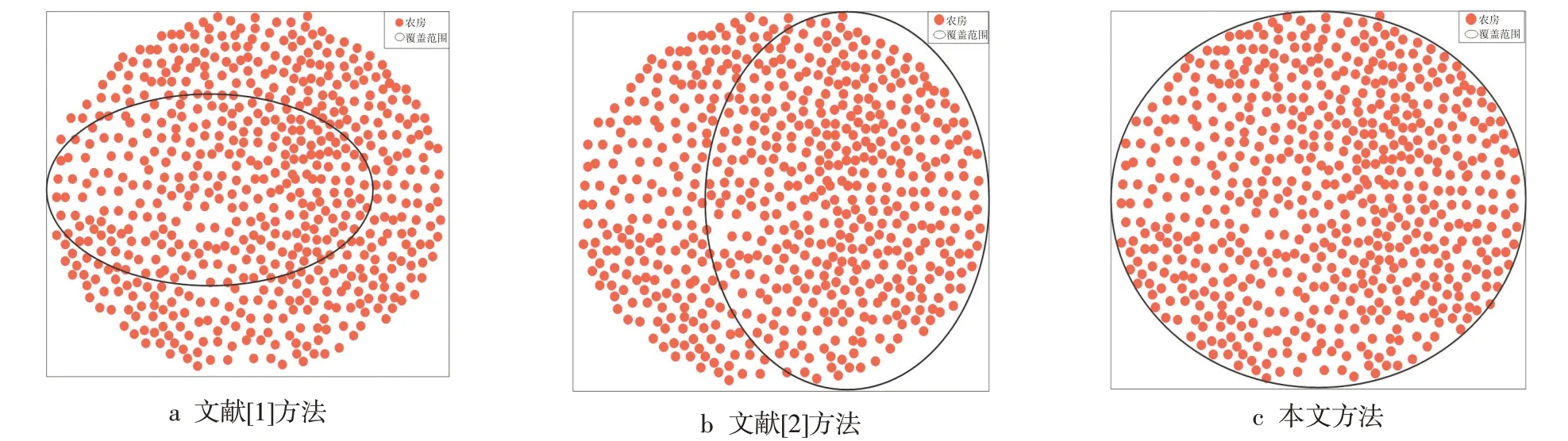
图6 覆盖率测试
2)测量误差对比。在上述实验结束后,将实验结果进行统计与分析,分析3种方法的测量误差,选择平面中误差与高程中误差作为对比参数,结果如表2所示。
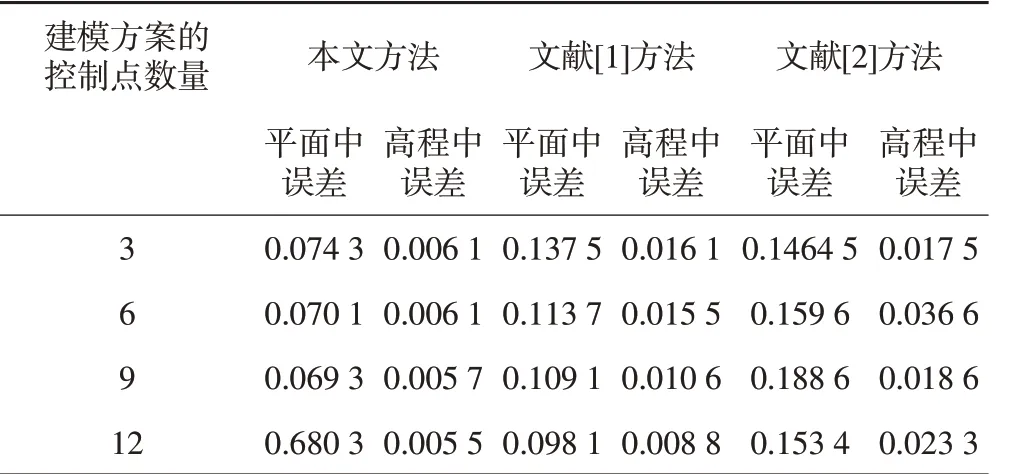
表2 测量误差
从上表的实验结果可知,针对平面中误差与高程中误差,本文方法测得的误差要小于实验对比方法。主要原因在于本文方法的布点方式具有合理性,测量覆盖率高,因此该方法的测量误差小。
3 结 语
为了提升农房占地面积测量工作效率,设计了基于无人机倾斜摄影技术的农房占地面积测量方法。利用无人机倾斜摄影技术来测量农房占地面积,相对于人工测量,无人机航空测量的操作更加简单,且受到地形影响较小,成本低廉。
