无人-有人机混合主动式交互决策研究
2022-07-03学喆张岳陈军
学喆 张岳 陈军
摘要:为了减少无人机与有人机的频繁交互,本文提出无人-有人机混合主动式交互决策模型方法。首先,采用基于规则的模糊认知图(RBFCM),构建决策任务选择规则库,实现决策任务的快速选择;其次,根据决策任务、无人机状态和当前战场态势,考虑到战场信息的不确定性,构建基于模糊灰色认知图(FGCM)的协同决策需求推理模型;最后,根据协同决策需求程度和有人机(飞行员)的任务负荷水平等信息,采用模糊认知图(FCM)建立交互方式决策模型。其中,在协同决策需求推理模型和交互方式决策模型中引入粒子群算法(PSO)学习模型的权重矩阵,使权重矩阵更加客观。通过仿真试验,验证了无人-有人机混合主动式交互决策模型方法的有效性和可靠性。该模型可以实现从决策任务的快速选择到交互方式的自主决策,为无人-有人机混合主动式交互决策研究提供新思路。
關键词:混合主动式;人机协同;交互决策;模糊认知图;粒子群算法
中图分类号:V19文献标识码:ADOI:10.19452/j.issn1007-5453.2022.05.007
有人机与无人机协同可以实现两者的优势互补,提升编队的整体作战效能,它是未来空战的重要样式[1-2]。其中,无人机与有人机的交互活动贯穿协同探测、任务规划、协同控制、协同攻击等任务环节[3-7]。为了减少频繁交互、降低飞行员的任务负荷,无人机应充分发挥自主潜能,根据人-机-环状态自主地选择应该执行的决策任务,推理该决策任务的协同需求,进而确定与有人机的具体交互方式。这种混合主动式的交互决策模式适用于具有较高自主水平的无人机与有人机的协同,有助于提升智能人机系统的融合交互水平[8-11]。
目前,国内外学者主要对混合主动交互模式下的协同控制等具体问题开展了研究,如Clare等[12]使用混合主动方式实现了多个无人驾驶车辆的自动任务分配和调度,操作员只在必要时处理不可预见的问题。Schmitt等[13]研究了有人机/无人机系统中混合主动式交互的方法,使无人机可协助有人机实现任务规划和管理。吴立珍等[14]建立了基于多模态交互的多无人机混合主动控制系统,根据决策等级和多任务动态分配原则切换人的控制权限和无人机的控制权限,实现操作员对多无人机的混合主动控制。但对于无人-有人机混合主动式的交互决策问题研究比较少。
混合主动式交互决策是指无人机能够根据自身状态、有人机(包括飞行员)状态,以及作战任务使命要求,自主确定其应执行的决策任务,推理该决策任务的交互需求,进而选择采用何种方式与有人机进行交互。它可以有效发挥无人机的智能决策推理能力,减少与有人机的交互频次,降低飞行员任务负荷,促使无人机的角色从有人机“听命的随从”转变为“忠诚的伙伴”,非常符合未来高端无人机和先进有人机的协同决策技术发展趋势。
因此,本文拟采用基于规则的模糊认知图,实现无人机决策任务的快速选择;考虑到复杂战场的不确定性,拟运用模糊灰色认知图实现协同决策需求的智能推理,并基于无人机自主级别划分标准建立交互方式决策模型。在建模过程中,需要充分发挥先验知识和可用数据的作用,提高交互决策模型的有效性和可靠性。
1 FCM及其扩展模型
1.1模糊认知图
模糊认知图(fuzzy cognitive map,FCM),是一种较理想的、可用于建模和模拟动态系统知识表示和决策支持的工具。经典FCM模型由概念节点、有向弧及其关联权值矩阵组成。节点表示系统的属性、特征、性能等;有向弧表示节点间的影响关系,其影响程度由关联权值矩阵描述,通过各概念之间的因果关系以及相互作用来模拟复杂系统行为,如图1所示。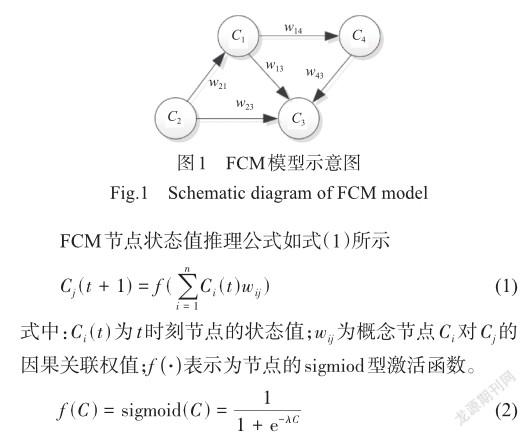
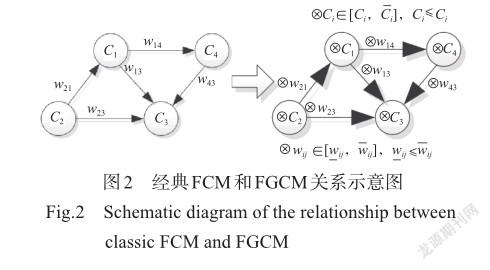
由于FCM建模方法简单、灵活,容易引入其他智能方法和学习算法,以及在不同应用场景良好的适应性和易用性,使得FCM的发展迅速,衍生出许多FCM扩展模型[15],主要包括基于规则的模糊认知图[16]、模糊灰色认知图[17]、直觉模糊认知图[18]、动态模糊认知图[19],并且在人机协同领域取得了广泛应用[20-21]。
1.2两种模糊认知图的扩展形式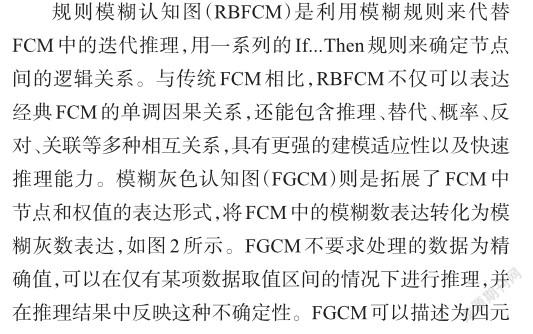
2混合主动式交互决策模型架构
无人-有人机混合主动式交互决策模型架构如图3所示。模型主要包括决策任务选择模型、协同决策需求推理模型和交互方式决策模型。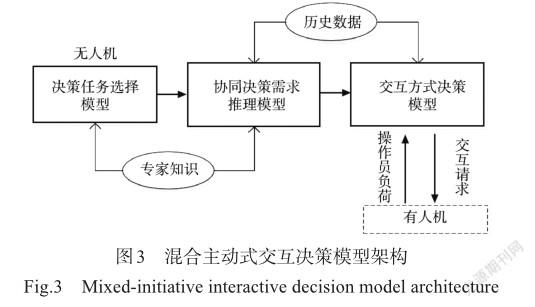
为了实现无人机对决策任务的快速选择,采用RBFCM模型方法对决策任务选择进行建模。其中,输入节点集合主要来源于战场态势CEnv、无人机状态CUAV和有人机的状态CMAV。初始选择模糊规则集R(·)由专家知识库构建,可采用知识图谱的方法抽取获得[22]。输出节点集合为决策任务类型CDecisionTask,可以引入规则评价值支持模糊规则的学习更新,如图4所示。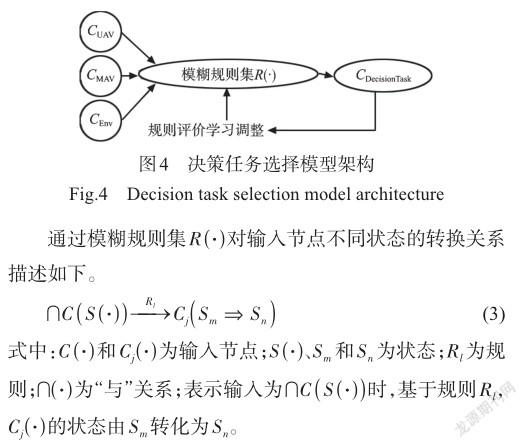
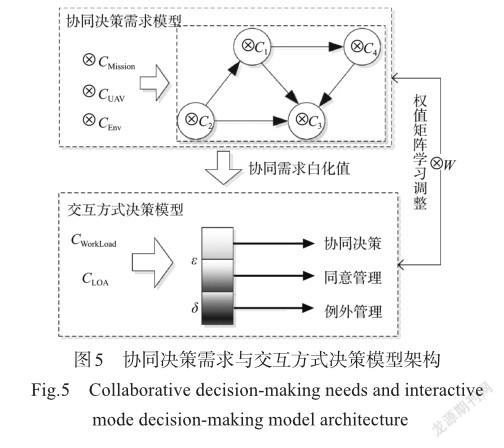
针对复杂战场环境的不确定性特征,采用FGCM对协同决策需求推理进行建模;从协同决策需求程度CDemand、飞行员任务负荷水平CMissionLoad和无人机自主等级CLOA等方面构建交互方式决策模型,如图5所示。模型的参数可以采用粒子群算法(PSO)进行学习,减小模型实际输出与期望输出之间的误差,并利用历史数据样本学习优化权重矩阵。DB90CEC3-3942-44E5-ABC4-FEBBBB41B9CA
3决策任务选择模型
基于“观察-判断-决策-行动”(OODA)的任务回路,一般无人机可选择的决策任务主要为:目标确定、威胁判断、航路选择、机动决策、攻击判断等[23]。从战场态势、无人机状态和有人机状态三个方面提取特征因素作为模型节点,如图4所示构建基于RBFCM的决策任务选择模型。
战场态势包括地形、气象以及电磁三个特征因素,其模糊化表征见表1。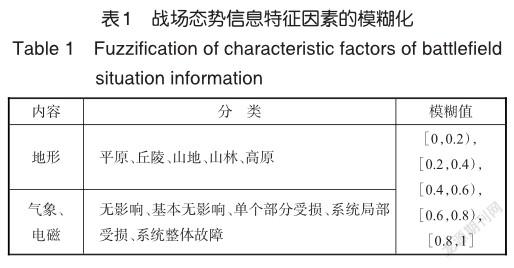
无人机状态包括自主等级、资源水平和智能水平三个特征因素。表2为改进的LOA划分标准,能与有人机协同决策的无人机自主等级最高应达到IV-V级,具备同意管理或例外管理模式。
无人机资源水平是指物理域中无人机所固有的、基于其装备水平的任务活动实施能力。资源支持为定值,仅受其装备水平影响,从无人机机动性、探测能力、通信中继能力、续航能力、战斗能力、交互能力、协作能力、电磁能力等方面综合考虑,将资源水平模糊化为[0,1]之间的5个等级。无人机智能水平指认知域内无人机观察、认知、分析、计划、决定、行动、沟通方面智能水平的支持能力。综合考虑上述因素,同样将其智能水平模糊化为[0,1]之间的5个等级。
在不同的特征因素下,无人机最适合执行的决策任务也不同。例如,当环境条件恶劣、无人机自主等级较低且有人机飞行员任务负荷较重时,无人机适合执行无须操作员授权、危险系数和对智能水平要求较低的航路选择等决策任务。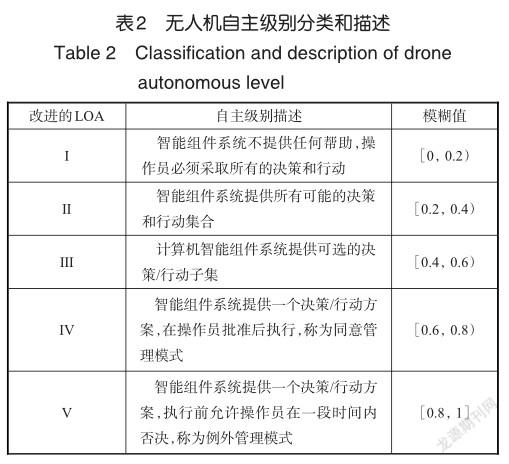
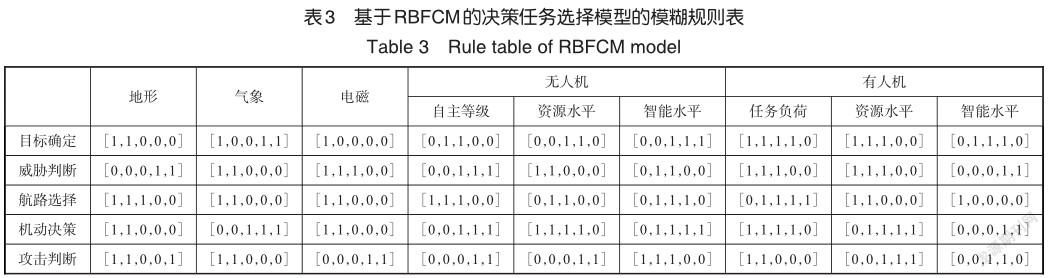
特征因素模糊化值可用编码的形式表示,方便RBFCM的推理,如图6所示。用5维矢量表示一个特征因素在[0,1]区间上的表现情况。例如,航路选择中特征因素地形的编码为[1,1,1,0,0]表示在航路选择决策任务中地形相对平坦,分布在前三个模糊区间。根据专家先验知识构建决策任务选择RBFCM模型的初始规则,见表3。
4协同决策需求推理模型
从使命任务、无人机状态和战场态势三个方面提取特征因素,构建基于FGCM的协同决策需求推理模型,并采用灰数的方式量化特征参数。
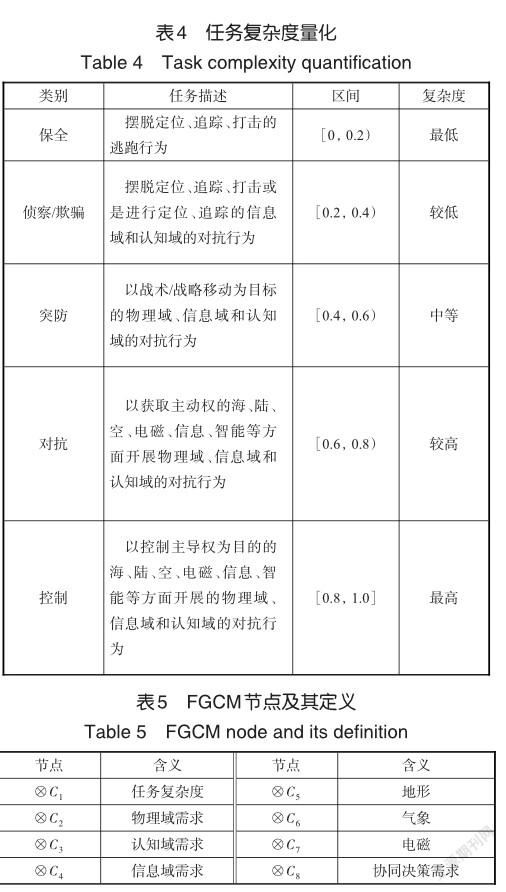
任务使命决定了任务的复杂度,根据不同任务类型的侧重点,模糊量化任务复杂度见表4。
无人机状态从物理域、认知域、信息域三个方面的需求进行描述。(1)物理域:无人机的需求体现在机动性、探测能力、通信中继能力、续航能力、战斗能力、交互能力、协作能力、电磁能力等资源水平的支持上,用Lp表示。(2)认知域:无人机的需求体现在观察、认知、分析、计划、决定、行动、沟通方面智能水平的支持上,用Lc表示。(3)信息域:将无人机抽象为节点,无人机间信息传递方向表示节点连接关系,主要从时效和安全角度考虑无人机信息传递拓扑结构所产生的作战效益。
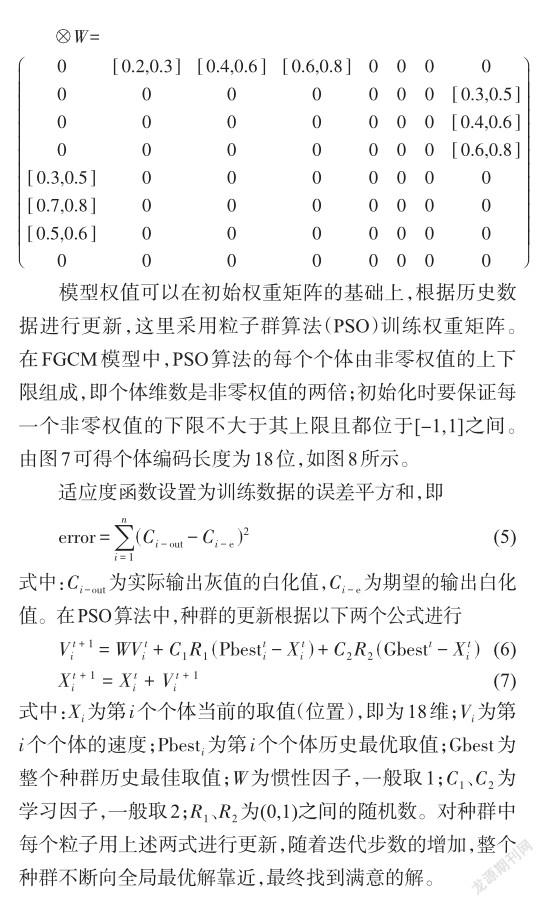
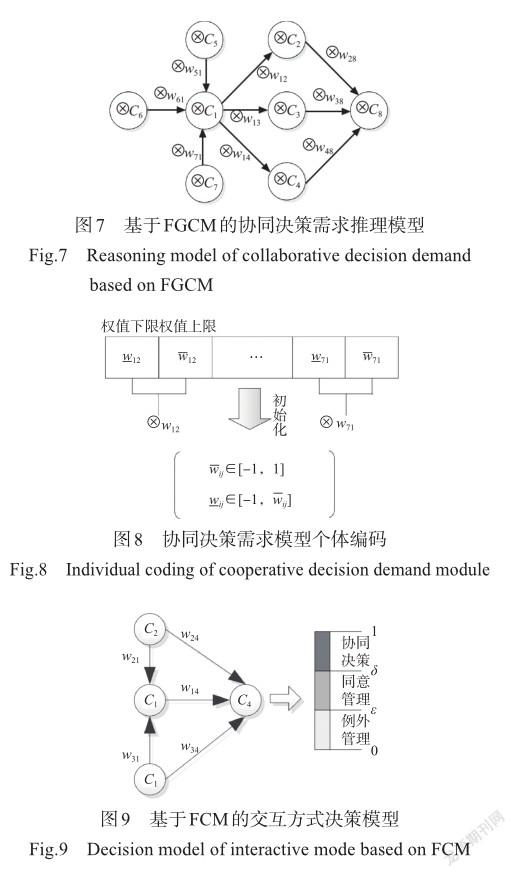
战场态势方面与表2选取的特征相同,不同的是它们的取值不再是一个确定的数,而是一个灰度区间。根据选取的特征因素及其影响关系,构建基于FGCM的协同决策需求推理模型如图7所示。其中,各节点含义见表5。模型初始权重矩阵确定如下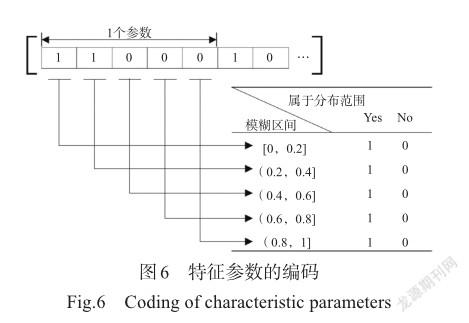
5交互方式决策模型
基于FCM构建的交互方式决策模型选取协同决策需求程度C1、当前无人机自主等级C2、飞行员的任务负荷水平C3三个因素为输入节点,推理结果由节点C4输出,并通过两个门限参数ε和δ将结果映射到三种交互方式:协同决策、同意管理、例外管理。门限参数可通过数据样本学习调整。决策推理模型如图9所示。
在同意管理和例外管理的无人-有人机交互方式下,有人机不参与无人机自主决策,只负责对无人机上报的决策方案进行批准或默认,此时无人机的决策自主等级处于IV-V级。在协同决策交互方式中,由于决策条件的不充分,導致无人机要么无法给出决策结果,要么只能列出可能的所有决策方案或是若干最可行的决策方案,此时无人机的决策自主等级处于I-III级,需要请求有人机干预其自主决策活动。
在数据样本的支持下,同样可以采用PSO算法优化交互方式决策模型的权重矩阵。与FGCM模型不同的是,FCM模型的PSO算法个体由模型中的非零权值组成,由于权重矩阵的非零值有5个,为了进一步提高模型的客观性,将两个门限参数ε和δ也作为学习的参数,但要满足0<ε<δ<1。因此,个体编码长度为7位。由FCM和两个门限参数ε和δ的定义可知,在种群的初始化和迭代过程中,每一位权值在[-1, 1]。
6仿真试验
6.1决策任务选择模型验证
基于RBFCM的决策任务选择模型的验证主要考察规则集是否完备且无冲突。
由表3易知,对于任意输入组合都有决策任务与之对应,所以规则是完备的。
对于冲突的检验,采取遍历所有输入组合的方法。按照规则表进行推理,找出冲突的输入组合并根据冲突的结果对规则进行调整。经过检验发现目标确定和机动决策存在冲突,对相应的规则进行调整,通过完备性和无冲突检验的规则集见表6(加粗部分为调整之后)。DB90CEC3-3942-44E5-ABC4-FEBBBB41B9CA
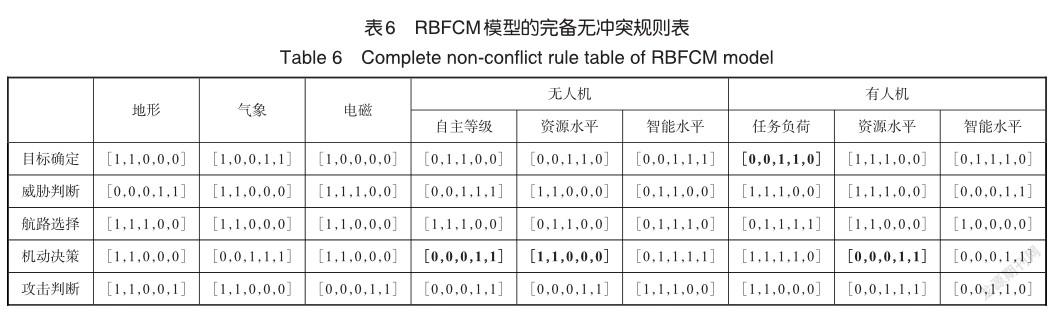
根据调整后的规则表,可以获得每种决策任务下各项特征参数的分布区间。以航路选择为例,其特征参数的分布区间如图10所示。根据特征参数的分布区间图,可以直观地看出模糊规则下不同决策任务的特征参数分布特点,根据调整后完备、无冲突的RBFCM模型,可以实现快速的决策任务选择。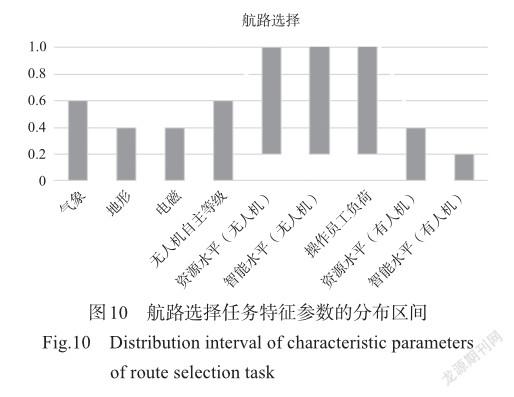
6.2协同决策需求模型验证
根据数据样本学习、调整权重矩阵,当训练集上的误差满足设计要求时,将此时的权重矩阵作为最终矩阵。训练样本示例见表7(训练样本为收集到的历史数据,故均为精确值且经过归一化处理)。设置PSO算法的种群大小为500,惯性因子取为1,学习因子取为2。为防止粒子更新步长过大,设置粒子最大速度为0.1,最大迭代步数300步。在学习过程中,对于超出限定范围的个体进行重新初始化,30组训练数据下,由于前10步误差与后面的误差不是同一量级,为了便于观察判断,从第11步开始绘制样本拟合误差下降曲线,如图11所示。
经过300步的训练,误差下降到非常小的范围内,此时得到FGCM模型的最终权重矩阵如下(结果精确到小数点后两位)。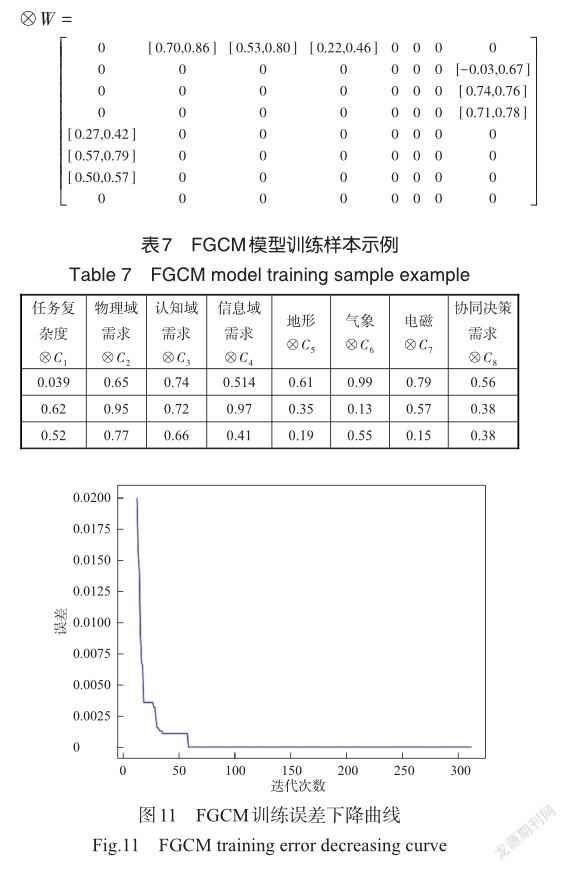
可见,采用PSO算法,收敛快,效率高,权值矩阵的学习提高了模型的客观性。
6.3交互方式决策模型验证
基于FCM的交互方式决策模型的权重矩阵同样采用PSO算法进行学习。与协同决策需求推理FGCM模型不同的是,FGCM的权重矩阵是在专家给定的初始权值基础上进行学习、调整,目标函数是训练样本的实际输出与期望输出之间的误差,而这里的初始矩阵需要随机生成,目标函数为样本数据中的交互方式决策正确率,其训练样本示例见表8(数据均经过归一化处理)。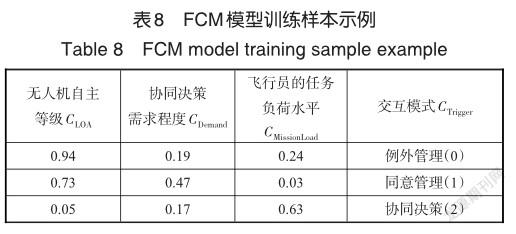
同样设置PSO算法的种群大小为500,慣性因子取为1,学习因子取为2。为防止粒子更新步长过大,设置粒子最大速度为0.1,最大迭代步数500步。在学习过程中,对于超出限定范围的个体进行重新初始化,30组训练数据下,训练准确率如图12所示。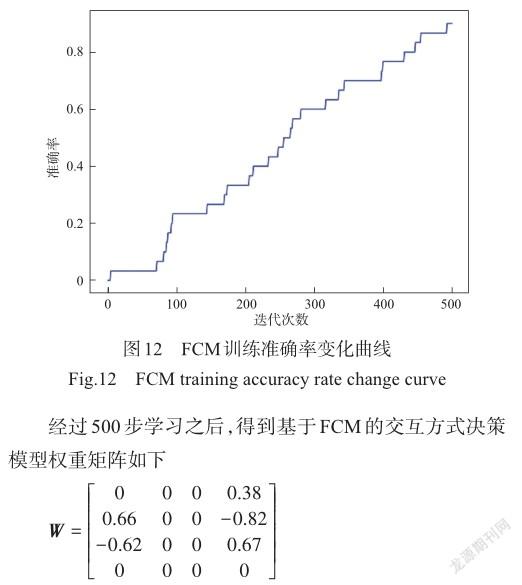
此时,两个门限参数分别为0.31、0.65,交互方式决策模型的准确率达到95%。
使用20组测试数据进行推理,三种交互方式分布如图13所示。在不同的情况下,无人机根据无人机自主等级、协同决策需求程度以及飞行员的任务负荷水平的不同,推理出适合此情境下的交互方式。例如,在无人机自主等级高而协同决策需求程度以及飞行员的任务负荷水平低时,选择例外管理交互方式。而在传统的交互方式中,不同情况下无人机均采用同一种交互方式,缺乏针对性,导致飞行员的频繁介入或不能及时介入,进而造成飞行员认知负荷过重或无法发挥人机协同的最大效果。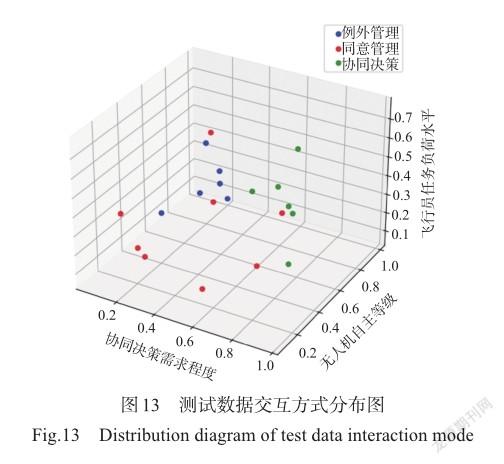
7结论
本文从避免频繁交互的角度出发,开展了无人-有人机混合主动式交互决策研究,主要工作如下:
(1)采用FCM及其扩展模型进行建模,考虑到战场态势的实时性,建立了基于RBFCM的决策任务选择模型,仿真试验表明,此模型的规则表完备且无冲突,可以实现决策任务的快速选择。
(2)面对战场信息的不确定性,建立了基于FGCM的协同决策需求推理模型,通过灰数表达战场信息的不确定性,并引入PSO算法,通过历史数据学习、调整权重矩阵,提升了模型推理的客观性和准确性。
(3)根据以上两个模型的结果建立基于FCM的人机交互决策推理模型,同样使用PSO算法学习权值矩阵。仿真表明,模型经过500步训练后,人机交互推理模型的交互模式选择准确率可以达到95%以上。
综上所述,基于混合主动式无人-有人机交互决策模型可以实现从无人机决策任务选择到无人机协同决策需求推理,再到其与有人机交互方式决策的全过程,可为未来高端无人机与先进有人机的协同决策技术研究提供方法参考。
参考文献
[1]牛轶峰,沈林成,李杰,等.无人-有人机协同控制关键问题[J].中国科学:信息科学,2019,49(5):538-554. Niu Yifeng, Shen Lincheng, Li Jie, et al. Key scientific problems in cooperation control of unmanned-manned aircraft systems[J]. Scientia Sinica Informationis, 2019,49(5):538-554.(in Chinese)
[2]樊锐,张鑫龙,马磊,等.有人/无人机协同作战研究[J].中国电子科学研究院学报,2020,15(3):230-236. Fan Rui, Zhang Xinlong, Ma Lei, et al. Research on manned / unmannedaerialvehicleteaming[J].JournalofChina Academy of Electronics and Information Technology, 2020,15(3):230-236. (in Chinese)DB90CEC3-3942-44E5-ABC4-FEBBBB41B9CA
[3]孙晓闻.无人/有人机协同探测/作战应用研究[J].中国电子科学研究院学报,2014,9(4):331-334. Sun Xiaowen. Application research for cooperative detection combat of unmanned/manned aerial vehicles[J]. Journal of China Academy of Electronics and Information Technology, 2014,9(4):331-334. (in Chinese)
[4]胡月.有人/无人机协同作战任务分配与航迹规划研究[D].南京:南京航空航天大学,2020. Hu Yue. Research on mission assignment and flight path planning of manned/unmanned aerial vehicles cooperative operations[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2020. (in Chinese)
[5]于星棋,陈春,王渊.联合作战条件下有人机与无人机蜂群协同作战研究[J].舰船电子工程,2021,41(10):5-6,29. Yu Xingqi, Chen Chun, Wang Yuan. Research on the cooperative operation of drones and man-machine swarm under the condition of joint operation[J]. Ship Electronic Engineering, 2021,41(10):5-6,29. (in Chinese)
[6]张杰勇,钟赟,孙鹏,等.有人/无人机协同作战指挥控制系统技术[J].指挥与控制学报,2021,7(2):203-214. Zhang Jieyong, Zhong Yun, Sun Peng, et al. Command and control system and technology for manned/unmanned aerial vehicle cooperative operation[J]. Journal of Command and Control, 2021,7(2):203-214. ( in Chinese)
[7]刘莎,张硕,刘禄.基于动态非零和博弈的无人机集群协同对抗方法研究[J].航空科学技术,2022,33(2):75-83. Liu Sha, Zhang Shuo, Liu Lu. Research on cooperative confrontation of UAV cluster based on dynamic non-zero-sum game[J]. Aeronautical Science & Technology, 2022,33(2):75-83.(in Chinese)
[8]Endsley M. Autonomous horizons:system autonomy in the air force-a path to the future(Volume I:human autonomy teaming)[M]. Washington:U.S. Department of theAir Force,2015.
[9]Allen J E,Guinn C I,Horvtz E. Mixed-initiative interaction[J]. IEEE Intelligent Systems and their Applications,1999,14(5):14-23.
[10]Tecuci G,Boicu M,Cox M T. Seven aspects of mixed-Initiative reasoning:an introduction to this special issue on mixedinitiative assistants[J].AI Magazine,2007,28(2):11-18.
[11]薛澄岐,王琳琳.智能人機系统的人机融合交互研究综述[J].包装工程, 2021,42(20):112-124. Xue Chengqi, Wang Linlin. Review of human-computer integration interaction in intelligent human-computer system[J]. Packing Engineering, 2021,42(20):112-124.(in Chinese)
[12]Clare A S,Macbeth J C,Cummings M L. Mixed-initiative strategies for real-time scheduling of multiple unmanned vehicles[C]//2012 American Control Conference(ACC),Montreal,CANADA,2012:676-682.
[13]Schmitt F,Schulte A. Mixed-initiative mission planning using planning strategy models in military manned-unmanned teaming missions[C]//2015 IEEE International Conference on Systems,Man,and Cybernetics(SMC),City Univ Hong Kong,Hong Kong,China,2015:1391-1396.DB90CEC3-3942-44E5-ABC4-FEBBBB41B9CA
[14]吴立珍,牛轶峰,王菖,等.多无人机监督控制系统设计与实践[J].无人系统技术,2020,3(4):42-52. Wu Lizhen, Niu Yifeng, Wang Chang, et al. Design and practice of supervisory control system for multiple unmanned aircraft systems[J]. Unmanned Systems Technology, 2020,3(4): 42-52. (in Chinese)
[15]Amirkhani A,Papageorgiou E I,Mohseni A,et al. A review of fuzzy cognitive maps in medicine:taxonomy,methods,and applications[J]. Computer Methods and Programs in Biomedicine,2017,142:129-145.
[16]Zdanowicz P,Petrovic D. New mechanisms for reasoning and impacts accumulation for rule-based fuzzy Cognitive Maps[J]. IEEE Transactions on Fuzzy Systems,2018,26(2):543-555.
[17]Harmati I A,Koczy L T. On the convergence of fuzzy grey cognitive maps[C]//3rd Conference on Information Technology,Systems Research and Computational Physics(ITSRCP),Krakow,POLAND,2018:74-84.
[18]Hajek P,Froelich W. Integrating TOPSIS with interval-valued intuitionistic fuzzy cognitive maps for effective group decision making[J]. Information Sciences,2019,485:394-412.
[19]Arruda L V R,Mendon?a M,Neves F,et al. Artificial life environment modeled by dynamic fuzzy cognitive maps[J]. IEEE Transactions on Cognitive and Developmental Systems,2018,10(1):88-101.
[20]陈军,梁晶,程龙,等.基于FCM的多无人机协同攻击决策建模方法[J].航空学报, 2022, 43(3):325526. Chen Jun, Liang Jing, Cheng Long, et al. Cooperative autonomous attack decision of multiple UAVs based on FCM[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(3):325526.(in Chinese)
[21]陳军,徐嘉,高晓光.基于ABFCM模型框架的UCAV自主攻击决策[J].系统工程与电子技术,2017,39(3):549-556. Chen Jun, Xu Jia, Gao Xiaoguang. Autonomous attack decision-making of UCAV based on ABFCM model framework[J]. Systems Engineering and Electronics, 2017, 39(3): 549-556. (in Chinese)
[22]钟昊,郭永贞,宗孝鹏.基于知识图谱的智能决策辅助系统研究[C]//第九届中国指挥控制大会,2021:133-138. Zhong Hao, Guo Yongzhen, Zong Xiaopeng Research on intelligent decision support system based on knowledge atlas[C] //Proceedings of the 9th China Command and Control Conference, 2021:133-138. (in Chinese)
[23]吴兆香,欧阳权,王志胜,等.基于人工智能的无人机区域侦察方法研究现状与发展[J].航空科学技术,2020,31(10):57-68. Wu Zhaoxiang, Ouyang Quan, Wang Zhisheng, et al. Status and development of regional reconnaissance methods of UAV based on artificial intelligence[J]. Aeronautical Science & Technology, 2020,31(10):57-68.(in Chinese)
Research on UAV-MAV Mixed-Initiative Interactive Decision
Xue Zhe1,Zhang Yue1,Chen Jun1,2
1. Northwestern Polytechnical University,Xian 710072,ChinaDB90CEC3-3942-44E5-ABC4-FEBBBB41B9CA
2. Chongqing Institute for Brain and Intelligence,Guangyang Bay Laboratory,Chongqing 400064,China
Abstract: In order to reduce the frequent interaction between UAV and MAV, a hybrid active interactive decision model method of UAV and MAV is proposed. Firstly, the rule-based fuzzy cognitive map (RBFCM) is used to construct the decision task selection rule base to realize the rapid selection of decision tasks. Secondly, according to the decision tasks, UAV status and current battlefield situation, considering the uncertainty of battlefield information, the fuzzy grey cognitive map(FGCM) is constructed. Finally, according to the collaborative decision-making demand degree and the task load level of MAV(pilot), the interactive decision-making model is established by using fuzzy cognitive map (FCM). Among them, particle swarm optimization(PSO) algorithm is introduced into the collaborative decision-making demand reasoning model and interactive decision-making model learns the weight matrix of the model to make the weight matrix more objective. Through simulation experiments, the effectiveness and reliability of the hybrid active interactive decision-making model method of unmanned man-machine are verified. The model can realize the rapid selection of decision-making tasks to autonomous decision-making in interactive mode, which provides a new idea for the research of unmanned-man-machine hybrid active interactive decision-making.
Key Words: mixed-initiative; human-robot cooperation; interaction strategy; fuzzy cognitive map; particle swarm optimizationDB90CEC3-3942-44E5-ABC4-FEBBBB41B9CA
