基于增量维纳反卷积的暂态过电压波形还原算法
2022-07-02董乘甫
郑 鑫,董乘甫
(1.重庆高速工程顾问有限公司,重庆 401147;2.维谛技术创新中心(西安)有限公司,陕西 西安 710000)
0 引 言
在以往过电压检测系统的研究中,常见的测量系统通常是利用分压器来获取过电压信号。对于此类接触式过电压传感器,其与电力系统中一次设备相连接的特点,往往令分压器本身结构简单、设计方便。但线路中的分布参数和系统内设备自身特性,往往会令测量系统的测量带宽受到限制。在测量操作过电压及雷电冲击电压时,其高频响应较差,分压系统测量结果存在畸变。
为解决数字化冲击测量系统的测量误差,反卷积的方法被应用于对测量数据的处理中[1-5]。文献[6]根据时域递归卷积与矢量匹配法相结合的方法对电压互感器测量结果进行处理,还原了高压端的原始波形。文献[7]在套管末屏分压测量系统中,应用增量维纳反卷积方法实现了对波形的还原,验证了系统对快速暂态过电压的测量可行性。文献[8]基于传统的增量维纳反卷积算法,结合离散Gabor变换展开去噪方法,提出了一种波形重构算法,并应用仿真进行了验证。
下面设计了一种波形还原算法,并在传统增量维纳反卷积方法的基础上,提出了一种预估γ值的改进算法。通过110 kV电容式套管分压试验平台进行验证,改进后的反卷积算法可准确地还原输入的原始信号。相比传统的增量维纳反卷积算法,改进后的算法减小了计算量,增加了实用性。
1 波形还原算法设计
1.1 过电压测量畸变的原因
在电力系统中,对于过电压检测系统所获取的输出信号,其成分不仅包含了过电压本身的信息和特性,同时也反映了测量系统的特性。如在基于电容型套管所组成的测量系统中,由于高压臂由套管内部导杆到末屏的等效电容和末端阻尼共同组成,所以套管自身的电容性能同样会影响着最终的测量结果。而基于电容式套管自身复杂的结构特点,使得电容式套管可等效为一个含有电位悬浮导体的电极系统,其电路模型为一个电阻、电容、电感构成的复杂网络[7],其各极板等效单元电路模型如图1所示。
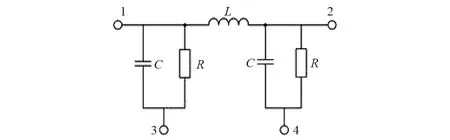
图1 极板等效单元电路模型
通过对该网络的分析可知,电容式套管自身的谐振频率较低,因此传感器的高频响应极易受到影响。这种畸变体现在套管自身电容特性、传感器性能与传输路径杂散参数等方面。所以,在实际的测量中,测量系统往往由于此类原因,无法达到理想的特性,从而导致测量信号会产生一定的畸变。
1.2 反卷积原理
波形还原算法的核心在于应用反卷积的方法,对传感器的输出信号进行处理,来反演系统输入端的原始波形。因此,首先需要明确反卷积还原的原理[9-12]。
对于线性时不变系统,这种传输过程可表为
(1)
式中:y(t)为系统得到的输出信号;h(t-τ)为测量系统在τ时刻的冲激响应;x(τ)为τ时刻的原始输入信号。转换到频域分析中,式(1)可表示为
Y(ω)=H(ω)X(ω)
(2)
式中,Y(ω)、H(ω)和X(ω)分别为y(t)、h(t)和x(t)进行傅里叶变换,转换到频域中的形式。在过电压测量系统的应用上,反卷积的目的是为了还原失真的高频信号,拓展测量带宽,还原后的结果可表示为
(3)
式中的X(ω)经过傅里叶逆变换,即可获得输入端的原始信号x(t)。
值得注意的是,由于上述理想分析过程中完全忽略了噪声信号的影响,因此可以完全复原输入信号。但是在实际过程中,噪声信号e(t)无法避免,此时信号传输过程如式(4)所示。

(4)
对该式进行频域转换可得
Y(ω)=H(ω)X(ω)+E(ω)
(5)
式中,E(ω)为e(t)的傅里叶变换形式。根据式(3),在考虑噪声信号的影响下,还原过程实际应为
(6)
对于实际的信号处理应用,由于无法准确地获取噪声信号,同时|H(ω)|在高频信号的处理中趋近于0,因此会导致算法对高频噪声信号极其敏感,从而造成较大的误差,这种影响也被称为反卷积的病态性问题。针对这一问题,通常可通过降噪和重构卷积模型两种方式来减轻。
1.3 基于维纳滤波器的卷积模型
对于反卷积复原算法中卷积模型的构建,通常可应用维纳滤波器来实现。维纳滤波器由N Wiener首次提出,该方法是一种基于最小均方误差准则下的最佳线性滤波方法,其对信号的处理过程如图2所示[13-14]。
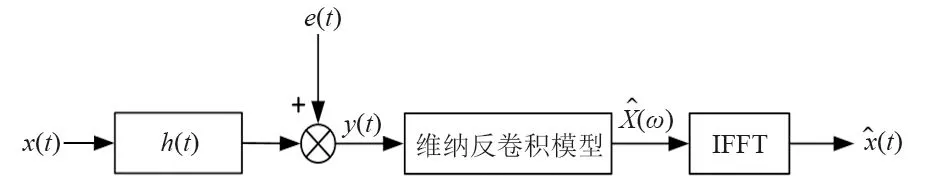
图2 基于维纳滤波器的信号处理过程
为构建维纳滤波器,可通过测量系统的方波响应结果,应用最小二乘法的思想,对传感器测量系统的频域响应特性H(ω)进行估计[15-18]。

(7)
式中,γ为输出结果中的噪声功率谱Se(ω)与信号功率谱Sy(ω)所决定的一个常数。
(8)
该系数γ>0,并且其取值将决定实际信号还原的效果。因此,初步得到还原信号的估计表示为
(9)
为进一步减小估计误差,采用增量维纳滤波器对上述的估计结果继续进行处理。这种方法在传统的维纳反卷积算法中引入了约束条件,允许进行迭代估计。设维纳反卷积的误差为Eold(ω)。
Eold(ω)=Y(ω)-X0(ω)H(ω)
(10)
将此误差结果继续代入到滤波器输入中,则此时滤波器得到的新估计结果为
(11)
因此,该结果对应的反卷积误差为
Enew(ω)=Y(ω)-X1(ω)H(ω)
(12)
根据式(10)、式(11)和式(12),可以得
(13)
由于γ>0,并且|H(ω)|≥0,所以有
|Enew|2≤|Eold|2
(14)
但需要注意的是,由于输出信号的信噪比是难以时刻准确获取的,该算法中的γ是一个人为输入的预设值。因此需考虑γ的初始取值对反卷积还原结果的影响。选取多组不同的γ值,分别进行信号还原,各还原结果如图3所示。
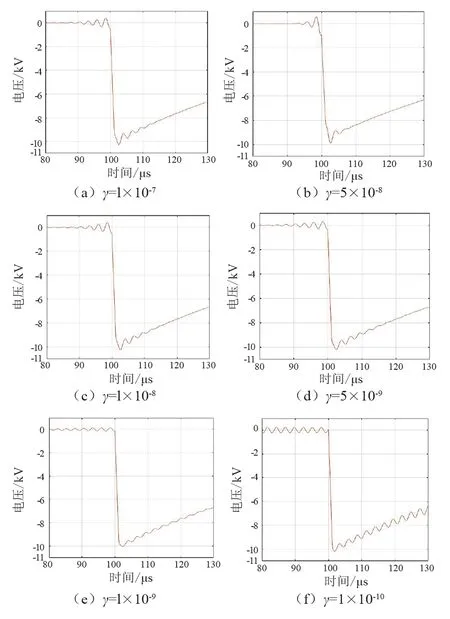
图3 不同γ值下的增量维纳反卷积波形还原结果
观察图中不同γ值下的波形还原结果,通过对比可知:
1)在γ值大于实际值时,虽然还原算法消除了原分压信号中的畸变,但还原信号与原始信号之间的误差较大,此时并没有反卷积的病态问题;
2)随着γ值的减小,还原信号与原始信号间的误差减小,波形逐渐一致;
3)当γ值进一步减小,且远小于由噪声功率谱所计算的实际值时,还原信号的波形与源输入信号依然相近,然而反卷积的病态问题也随之可见,并逐渐严重。
综上所述,人为预估的γ值对还原结果有着显著影响,且极易令还原结果产生误差。
1.4 改进的增量维纳反卷积算法
针对γ值的取值问题,提出了一种改进的增量维纳反卷积算法。
首先,应用基础的增量维纳反卷积算法处理原输出信号,可得到初步恢复的还原结果Xold(ω)。对于原始的维纳反卷积算法,该结果仅为单次反卷积结果,而增量维纳反卷积可引入迭代计算,进一步减小误差到人为控制范围内。其次,可在此基础上,进一步计算还原结果Xold(ω)的卷积和原输出信号之间的误差Eold(ω)为
Eold(ω)=Y(ω)-Xold(ω)H(ω)
(15)
利用计算得到的Eold(ω)与初步还原结果Xold(ω),可估计下一次计算中γ的取值,以此重新构建维纳滤波器为
(16)
(17)
新的还原结果对应的反卷积误差为
Enew(ω)=Y(ω)-Xnew(ω)H(ω)
(18)
根据式(16)、式(17)和式(18),可以得
(19)
由式(19)可知,改进后的反卷积算法同样满足:
|Enew|2≤|Eold|2
(20)
值得注意的是,尽管在迭代运算中利用还原结果与误差值对γ的取值进行了估计,但在初次的反卷积计算中,仍然需要人为地预设一个γ初值。实际应用中,通过如前述所采用的递归最小二乘(recursive least squares,RLS)自适应滤波器降噪处理后,该参数值可控制在小于10-5范围以内。
综上所述,改进后的反卷积算法步骤依次如下:
1)预设γ值,运用传统维纳反卷积算法处理传感器输出信号,得到初次还原结果;
2)利用初次还原结果,可对γ值重新进行估计;
3)重新构建维纳滤波器,采用增量维纳反卷积算法处理初次还原结果;
4)分析此次的还原结果与原信号的误差是否达到要求,若达到则终止运算,否则回到步骤2继续运算。
改进后维纳反卷积算法流程如图4所示。
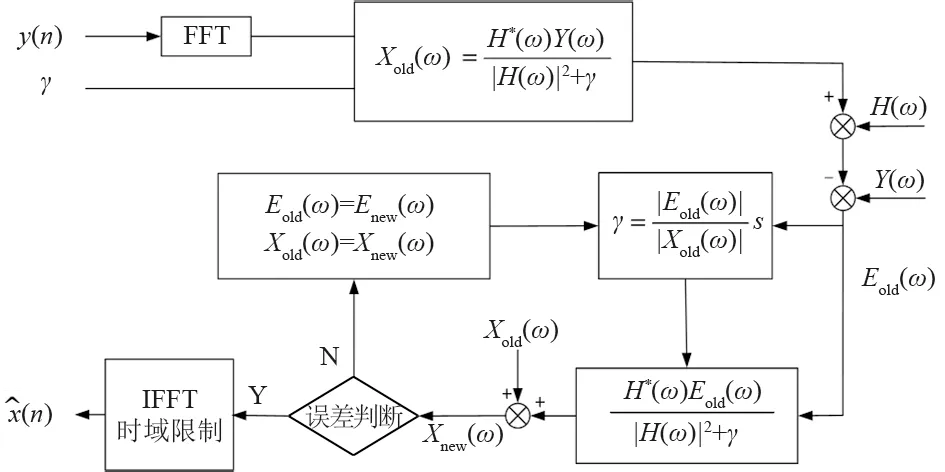
图4 改进的维纳反卷积算法流程
2 仿真测试
应用仿真实验对改进的增量维纳反卷积算法进行验证,所做仿真试验是对套管末屏分压器的测量进行了模拟,电路参数按照套管末屏分压系统的现场试验情况进行选取。仿真中输入的冲击电压波形与传感器输出的波形如图5所示。
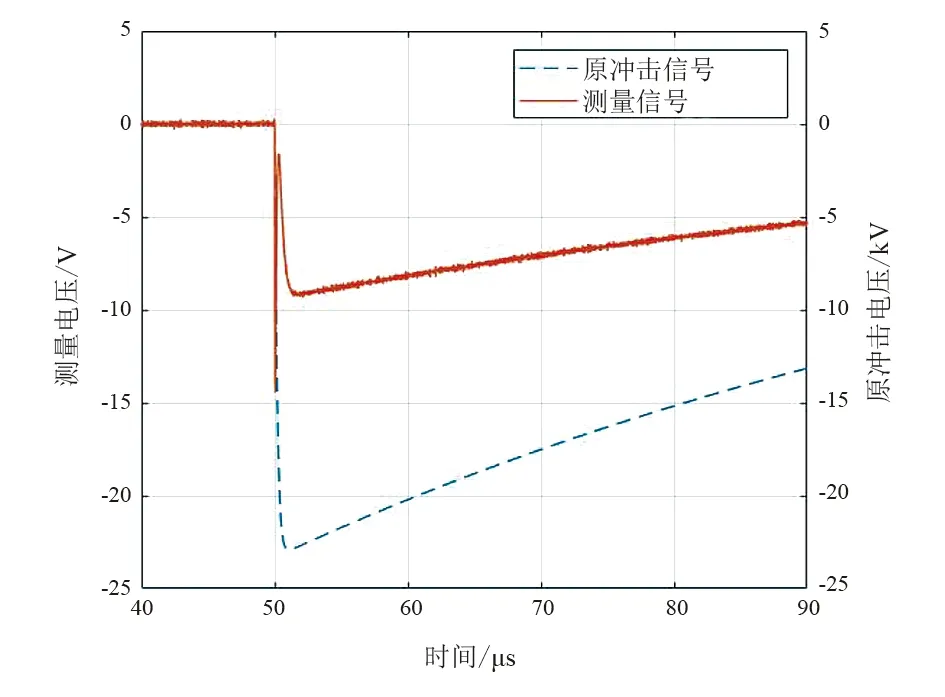
图5 原始冲击输入和传感器输出波形
仿真试验模拟了实际中的常规问题。从结果上分析,由于增大了仿真电路中的杂散电感参数,传感器端输出的电压波形在波头处存在很大的畸变,导致测量结果与输入波形不符,测量效果不理想。同时,传感器输出的电压信号中混杂了较大的噪声分量。经过计算,输出结果的信噪比(signal-to-noise ratio,SNR)为26.4 dB。若信号传输过程中掺杂了此程度的噪声分量,反卷积运算将会产生较为严重的病态问题,如图6所示。
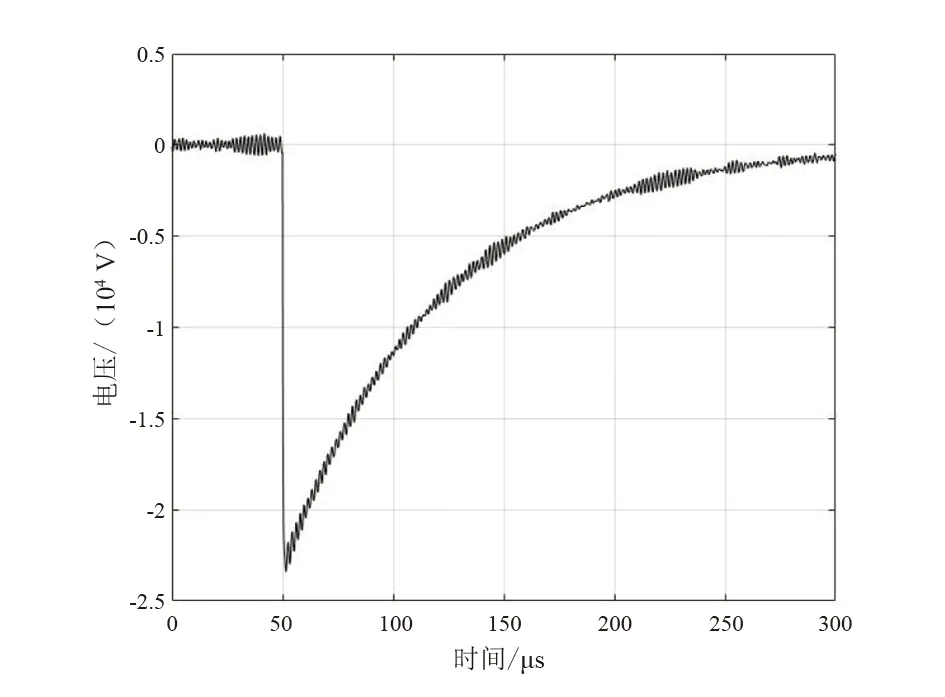
图6 降噪前的还原波形结果
未经降噪的情况下,虽然已经能够还原原始波形的整体趋势,但波形的病态问题仍然导致还原结果与真实输入存在较大的偏差。由此,应用RLS自适应滤波算法对输出信号进行处理,得到的降噪后结果如图7所示。
图7中结果表明,RLS自适应滤波算法并未改变传感器本身的输出特性,经处理后的波形SNR为47.6 dB。对此,应用改进的增量维纳反卷积算法处理输出电压信号,并将还原结果波形与原始输入波形均做归一化处理,得到的还原信号波形和归一化对比如图8所示。
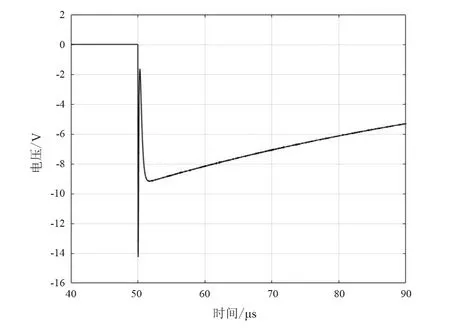
图7 降噪后的输出电压波形
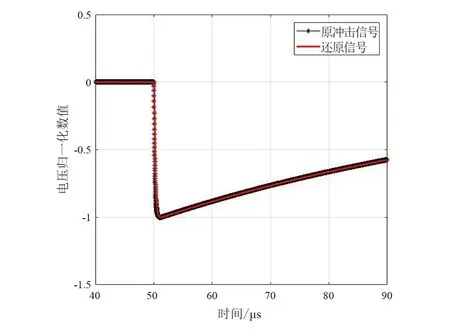
图8 仿真验证还原结果归一化对比
从图8中结果可以看出,应用还原算法得到的还原波形不再有波头处的畸变,且其与原输入波形基本一致。经过计算,原输入信号与还原信号的波前时间误差不足0.1 μs,且二者归一化波形间的均方误差e2仅为9.44×10-7,证明还原效果十分理想。
为验证改进后算法的优化程度,同时应用原增量维纳反卷积算法对传感器输出波形进行处理,得到两种反卷积方式在相同γ取值下运算的迭代次数,如表1所示。

表1 两反卷积方式运算迭代次数
对比表1中数据可知,相比于传统的增量维纳反卷积算法,改进后的维纳反卷积算法可通过前次的还原结果来估计γ取值,所以极大地减少了迭代计算次数,减小了计算量。
结合以上仿真试验和分析可知,改进后的反卷积算法能够实现对原始电压的准确还原。
3 试验测试
借助110 kV套管末屏分压试验平台,对套管末屏分压器的现场测量数据进行处理,进一步测试算法的实际应用效果[19]。测试的雷电冲击响应试验现场接线如图9所示。
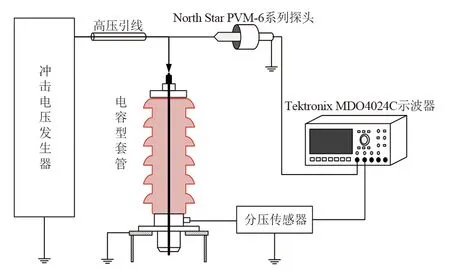
图9 冲击试验接线
试验期间选取了一组畸变的分压波形,该结果如图10所示。
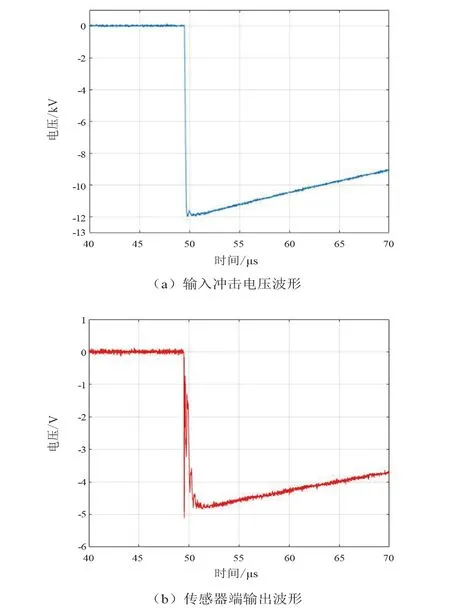
图10 实验得到的畸变波形结果
在图10中,输入端的冲击电压信号为非标准雷电冲击电压,其波前时间为0.24 μs,电压幅值为11.96 kV,极性为负。
传感器端输出电压信号在波头处存在严重震荡畸变,该现象可能由回路和传感器内部杂散参数以及不良的线路匹配方式等问题所造成。两波形归一化后的幅频特性如图11所示,对比两波形的幅频特性曲线,可以看出失真的传感器端输出波形无法完整反映源输入波形的真实情况。
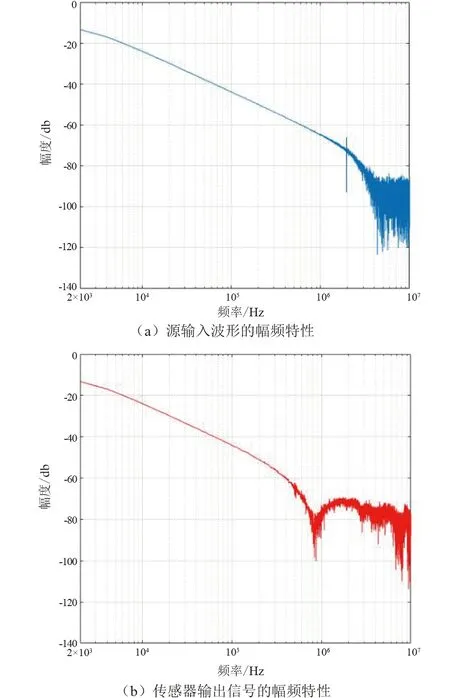
图11 输入、输出波形的幅频特性
利用设计的波形还原算法,处理畸变的输出信号,得到的波形还原结果和源冲击波形的归一化对比以及二者的幅频特性对比如图12所示。
从图12(a)可知,还原波形的波前时间为0.25 μs,与源波形的波前时间误差仅为0.01 μs,并且波形的波头处畸变得到了消除,其整体趋势同源波形基本一致。经过计算,还原波形与源输入波形的归一化均方误差为3.81×10-5,证明还原算法的还原效果理想。同时,对比图10(b)与图11(b)中的频率谱,相比于传感器输出波形在频率1 MHz以上的失真情况,还原波形准确地复原了源波形在高频段的各频率成分。
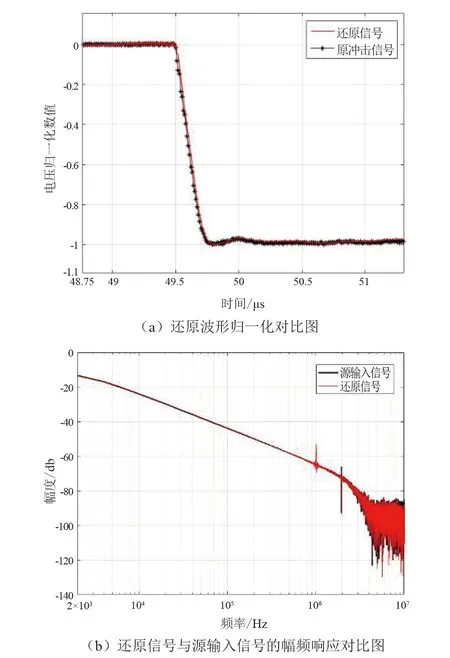
图12 还原波形与源输入信号的对比
图13为原系统与应用还原算法后的频率响应对比图。
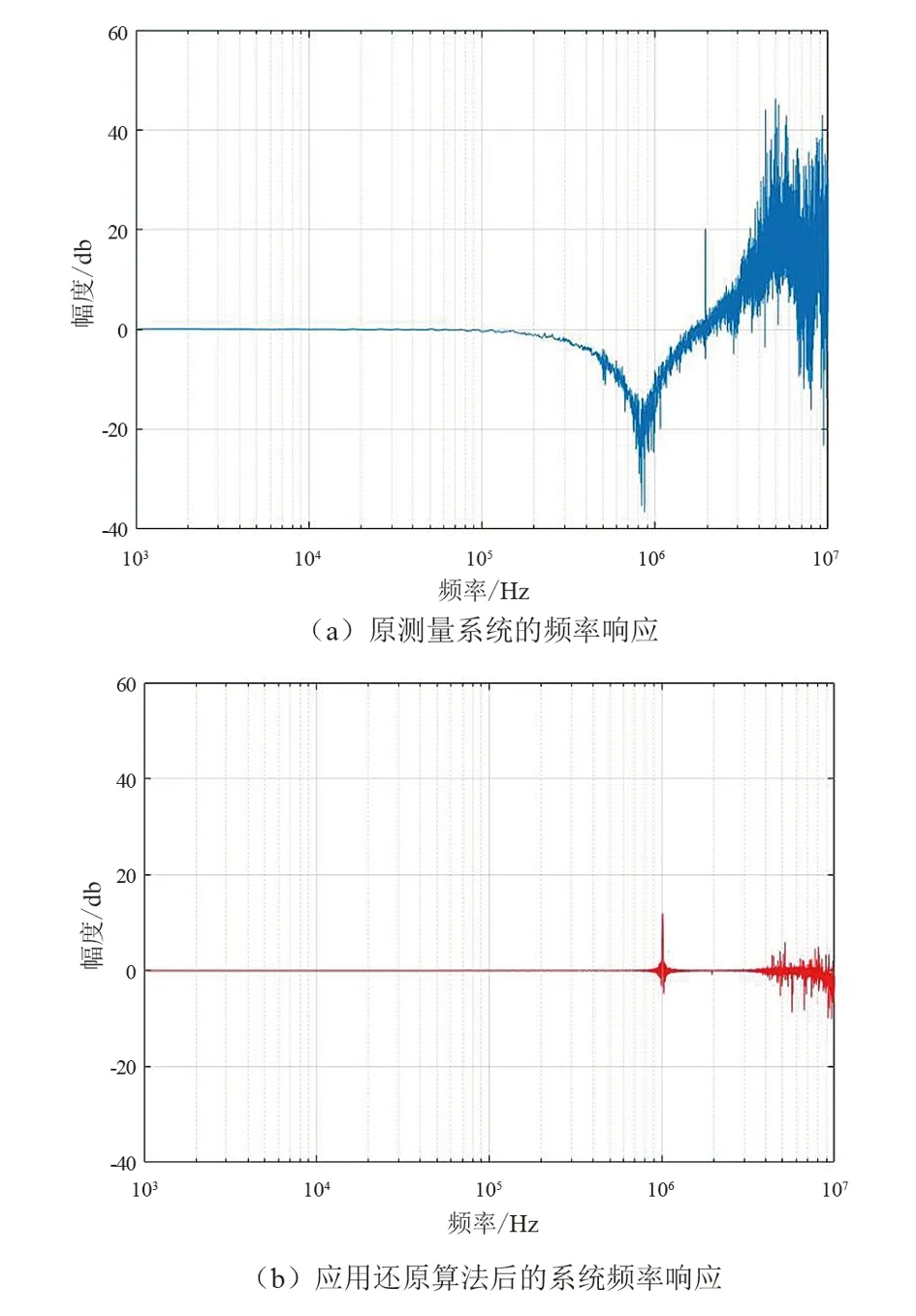
图13 归一化后系统频率响应对比
对系统的频率响应对比分析,图13结果显示,应用还原算法后,除个别谐振点外,测量系统的频率响应曲线在10 MHz以内无明显波动。相比于原测量系统在不足1 MHz即出现的信号畸变情况,波形还原算法有效地拓展了原测量系统的测量带宽。
4 结 论
基于维纳反卷积方法设计了一种波形还原算法,结合仿真与试验的分析,其主要结论如下:
1)阐述了波形还原算法的设计目的,分析了测量系统自身内部特性引起波形失真的原因,维纳滤波器的构建方法和维纳反卷积算法运行原理;
2)在分析了人为输入γ参数对还原结果产生的影响后,提出了一种新的γ参数预估方法,在原有的维纳反卷积算法上做出了优化改进;
3)通过仿真和试验验证了算法还原原始波形的可行性,并同传统的维纳反卷积算法做出了对比分析,验证了改进后的算法拥有更好的实用性。
