一种基于RTK无人机摄影测量导线弧垂的方法研究
2022-07-01朱春茂
郝 斌,才 源,朱春茂
(国网葫芦岛供电公司,辽宁 葫芦岛 125000)
近年来我国超高压、特高压输变电工程已成为世界级的工程,弧垂作为输电线路施工和运行过程中的关键指标,准确测量尤为重要。随着无人机(UAV)技术的不断深入,特别是采用GPS载波相位实时差分测量技术(RTK),辅助无人机摄影测量过程中的位置定位可实现厘米级的测量精确性,获得了广泛认可。而且无人机的高机动性和便携性可更加接近复杂且不易测量的目标,其拍摄的高程数据准确地存储在照片中,可通过Python算法实现数据分析和处理。所以,将RTK无人机摄影测量应用于输电线路弧垂测量具有可研性和重要意义。
1 架空输电线路弧垂测量现状
架空线任一点至两端悬挂点连线的铅垂距离,称为架空线该点的弧垂(工程上所说的弧垂,一般指中点弧垂,见图1)。目前,导地线弧垂的观测方法一般有异长法、等长法(平行四边形法)、角度法、平视法。在实际输电线路验收过程中,为了操作方便,避免档距或悬挂点高差在测量时的影响,减少现场计算量以及掌握弧垂的实际误差范围,应首先选用异长法和等长法。当客观条件受到限制,不能采用异长法和等长法观测时,可选用角度法进行观测。如果采用异长法、等长法和角度法都不能达到观测弧垂的允许范围或难以掌握实际观测误差时,才考虑用平视法来观测导线的弧垂。
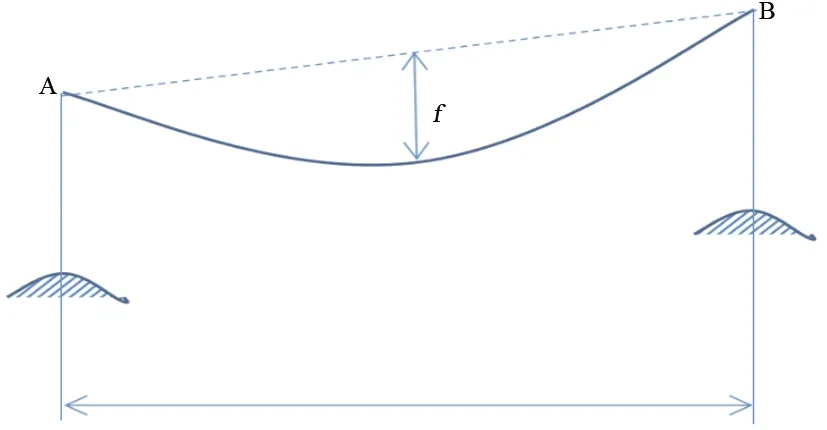
图1 输电线路导线弧垂
采用经纬仪测量导线弧垂时,需要计算的参数较多,精度要求也高。而在一些特殊的地形、导线挂点高差较大或者档距较大的观测档,以上方法也不一定适用。特别是在小档距孤立档导线弧垂观测时,由于导线弧垂较小,经纬仪十字中丝很难平切到导线。只能通过间接的方式对孤立档弧垂进行计算,由于耐张串长度和重量存在,这对导线的弧垂计算会产生严重影响。由于弧垂观测方法受以上因素限制,可能导致线路施工或验收时弧垂观测误差较大,影响线路安全稳定运行。
综上所述,采用一种直接且不受杆塔所处地形影响的导线弧垂观测方法迫在眉睫。随着无人机(UAV)技术的不断发展,采用实时动态差分法定位(RTK)技术,可实现厘米级定位无人机,为解决上述问题提供了方向。
2 无人机摄影测量导线弧垂的理论
针对输电线路地面情况复杂、档距较大、铁塔高度高等复杂情况,利用RTK无人机摄影测量灵活的优势,通过导线弧垂计算模型分析、无人机选取、摄影测量弧垂的数学模型分析和获取弧垂特征点方法研究等流程,完成RTK无人机摄影测量导线弧垂的方法研究。再根据无人机操控特点,确定无人机摄影测量导线弧垂的操作方法。
2.1 导线弧垂数学模型分析
工程上所说的弧垂,一般指中点弧垂,如图2中f所示(以架空地线为例)。由图2可知,AB是梯形的平分线,根据几何理论有:

图2 导线弧垂数学模型

(1)
受杆塔所处地形等因素限制,传统测量仪器无法直接测量出C、A′及D点的海拔高度。在精度允许的范围内,可以视导线的悬挂曲线为仅在在重力作用下处于铅垂面内的抛物线,所以在工程测量中,传统导线弧垂测量只能利用经纬仪等通过异长法、等长法(平行四边形法)、角度法或平视法进行测量。但利用RTK无人机对C、A′、D这3个特征点进行拍摄照片,照片内包含水平高程信息,经过数据提取即可获得C、A′及D点的水平高程,再根据式(1)即可直接计算出导线弧垂。
2.2 测量平台RTK无人机的选取
经过对导线弧垂数学模型分析研究,考虑测量精度和操作方法可行性要求,本项目选取的无人机平台是由大疆创新科技有限公司(DJI)推出的精灵Phantom 4 RTK无人机,其技术性能分析如下:精灵Phantom 4 RTK无人机集成RTK定位模块,采用基于载波相位观测值的实时动态定位技术,拥有强大的抗磁干扰能力,能够实时稳定在指定高精度坐标系中的三维位置。在地面风速远小于5 m/s时,垂直定位控制在±1.5 cm,水平定位控制在±1 cm之内,真正实现厘米级定位。
精灵Phantom 4 RTK无人机其搭载的TimeSync图传系统稳定可靠,提供远达7 km的高清图传。可实现飞控、相机与RTK的时钟系统微秒级同步,减少位置信息与相机的时间误差,为摄影测量提供更精确的高程数据信息。搭载的相机镜头都经过严格工艺校正,相机中心相对于机载RTK天线相位中心的位置进行补偿处理,确保摄影测量的绝对精度。
大疆精灵Phantom 4 RTK无人机的厘米级精准定位系统、远距离传输“三同步”图传系统、相机补偿和便携强等优势,确保测量保证了图像高程数据的绝对精度,能够满足摄像测量导线弧垂的精度和技术要求,为实现无人机摄影测量导线弧垂提供了技术基础。最终,本项目选取大疆精灵Phantom 4 RTK无人机为摄影测量平台。
2.3 无人机摄影测量导线弧垂数学模型分析
大疆精灵Phantom 4 RTK无人机摄影记录的高程信息为海拔高度,所以无论观测档地形如何,摄影记录的数据始终是水平面到特征点的海拔高度,可确定RTK无人机摄影测量导线弧垂的3个特征点为(0,1,2),如图3所示(以架空地线为例)。通过操控无人机分别摄影记录特征点的高程数据(h0,h1,h2),代入式(1)有:
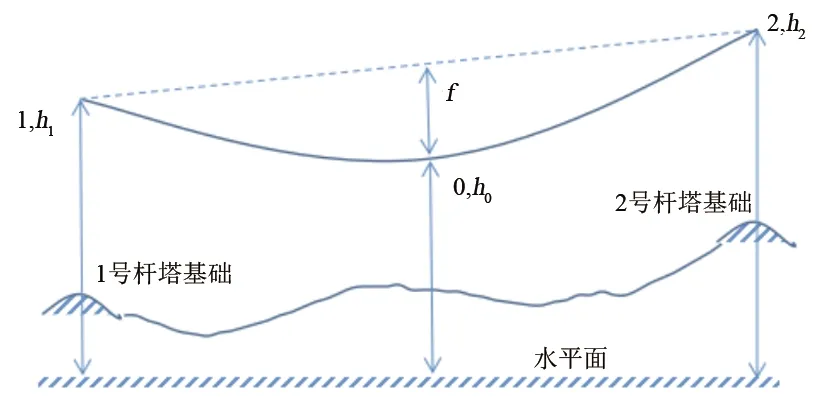
图3 无人机摄影测量导线弧垂数学模型
(2)
综上,式(2)即为RTK无人机摄影测量导线弧垂的理论公式。
2.4 无人机获取导线弧垂特征点方法研究
根据上述理论基础和现场实践总结,无人机获取导线弧垂特征点的过程可分解为4个步骤(见图4),为叙述简洁明了,本部分以某一直线杆塔单条导线为例研究说明,实际测量多条导线的情况可依据下面所述方法推演,不再赘述。
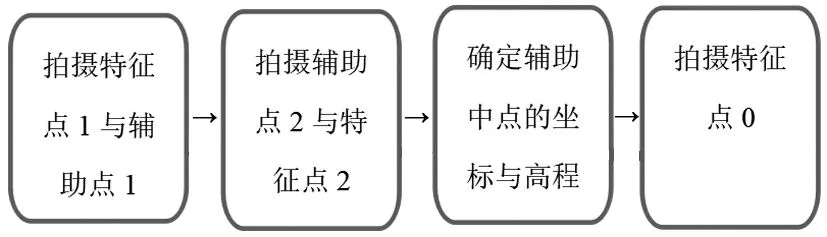
图4 无人机获取导线弧垂特征点流程
无人机摄影测量导线弧垂各特征点及辅助点示意图(见图5),其中辅助点为获取特征点0的必要条件,具体操作方式如下。

图5 无人机获取导线弧垂特征点与辅助点示意图
a.起飞前准备。选择合适机场,确定起飞和测量条件,链接无人机RTK服务,设置出遥控器屏幕网格。
b.起飞并拍摄特征点1与辅助点1。在确保周围环境安全的前提下,安全操控无人机至特征点1(1号杆塔导线悬垂线夹正前方5~8 m处,见图6),确认摄像头角度为0°,拍摄照片获取h1。安全操控无人机至1号杆塔正上方,调整摄像头角度为-90°,参考屏幕网格中点,确保无人机处于1号杆塔正上方5~8 m处,该点即为辅助点1(1号杆塔中心正上方),截图此时图传屏幕,获取到(X1,Y1,H1)。


图6 特征点1与辅助点1示意图
c.拍摄辅助点2与特征点2。安全操控无人机至2号杆塔正上方,调整摄像头角度为-90°,参考屏幕网格中点,确保无人机处于2号杆塔正上方5~8 m处,该点即为辅助点2(2号杆塔中心正上方),截图此时图传屏幕,获取(X2,Y2,H2)。安全操控无人机至特征点2(2号杆塔导线悬垂线夹正前方5~8 m处)确认摄像头角度为0°,拍摄照片获取h2。
d.降落,确定辅助中点坐标与高程。根据查看特征点1与2照片或截图的经纬度和高度信息,确定辅助点(1,2)连线上辅助中点位置(用于获取特征点0)。辅助中点坐标与高程信息均为辅助点(1,2)同类数据之和的一半(仅限无人机正面飞至辅助中点的情况,其他情况可自行设定高度以确保安全)。使用“航点飞行”模式,添加起始点与航点,该航点即为辅助中点,设置好航点(辅助中点)的各项参数(经纬度、高程、结束动作等),安全飞行至辅助中点位置,如图7所示。

图7 确定辅助中点坐标及高程示意图
e.拍摄特征点0。待飞机在中点悬停后,仅调整飞机航向与摄像头角度,确保飞机航向与导线垂直(参考网格线)。操控无人机前进或后退至导线外侧5~8 m处,调整摄像头角度并参考网格线,匀速降落至待测导线正前方(此点即为特征点0),确认摄像头角度为0°,进行拍摄获取h0。
f.降落。在确保安全飞行的前提下,降落飞机。至此3个特征点照片拍摄完毕,弧垂计算特征点数据h0、h1、h2均已获取完毕,准备数据处理和弧垂计算。
3 数据处理与弧垂计算
通过无人机摄影测量导线弧垂的数学模型分析可知,数据处理时如果确定出h0即可满足为满足自动计算条件。因弧垂计算特征点数据h0、h1、h2的大小关系始终满足h1或h2>h0,此数据特征为弧垂自动计算提供了条件。运用Python语言程序设计,编辑指定算法可实现照片高程数据自动抓取,再设计相关算法分析出h0,即可实现自动计算,在实际测量场景下,提高测量和计算效率。
运用Pyinstaller软件,编程并封装上述主要算法,开发出“驰度测量V1.0”软件,即可完成该条导线弧垂的自动计算,提高测量效率(见图8)。

图8 弧垂计算软件界面
4 典型案例分析
4.1 方法验证分析
2020年7月,本项目试验团队在葫芦岛地区实地验证应用。选取了具有代表性的7档输电线路作为试验测量线路。设立2组无人机测量小组和2组经纬仪测量小组,分别对7档试验线路进行导线弧垂测量并做好记录(见表1)。
表1 220 kV线路导线弧垂现场实测记录
4.2 实用性对比
在使用RTK无人机摄影测量的同时,对试验档的导线弧垂用经纬仪进行测量。通过表1对比可知:RTK无人机摄影测量导线弧垂准确性符合工程要求,精度较高。特别是在杆塔所处地形复杂的情况下,优势较大,实用性较强。经试验人员反馈,在连续测量作业时RTK无人机摄影测量导线弧垂省时省力,测量效率较高,具有可推广性。
5 结语
通过对RTK无人机摄影测量导线弧垂技术的探索与研究,提出了采用RTK无人机摄影测量导线弧垂的新方法。专门设计了数据处理和弧垂计算软件,大大提高了弧垂观测效率。通过以上研究介绍,有效解决传统导线弧垂观测方法不能满足现场生产全部需要的问题,进一步弥补现场生产瓶颈,从而提高弧垂测量的工作效率。通过案例分析,试验验证了RTK无人机在测量导线弧垂应用上的可行性,为输电线路设计、施工、验收等提供了一种弧垂观测和检验的新方法,也为输电线路交叉跨越和档距测量提供了新思路。
