电力隧道智能监测机器人设计及应用探究
2022-07-01梁隆飞
梁隆飞
摘 要:电力隧道的应用可有效提升城市空间利用率,故在现代城市建设规划期间被广泛应用,为强化电力隧道的巡视检修质量,可有针对性地设计并应用智能监测机器人。基于此,本文首先分析了电力隧道智能监测机器人系统架构情况,进一步从不同方面展开设计应用分析。
关键词:电力隧道;智能监测机器人;设计应用
引言:
电力隧道运行期间需对内部设备状态、环境气体含量、温湿度条件进行监测,但现阶段电力隧道的日常巡视检修方式较为单一,数据采集缓慢,且存在监测盲区,不利于电力隧道的整体把控,为实现电力隧道实时高效监测,可应用人工智能技术,设计并应用智能监测机器人,以此更好地开展电力隧道管理工作。
一、系统架构设计分析
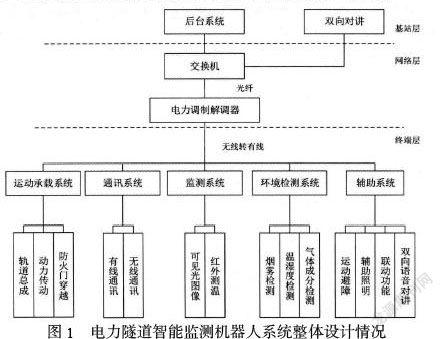
为确保智能监测机器人可在电力隧道巡查检修方面发挥良好效果,可将其机器人系统架设为终端层、通信层、基站层三部分,其中终端层位于电力隧道内部,通信层位于后台与终端之间,基站层处于隧道集控中心。(1)基站层主要由双向对讲、显示器、后台服务器、后台监控软件构成,可分析处理系统终端层所采集的数据,若仅分析发现隧道内具有风险隐患,则会自动发出警报。机器人监测系统所得数据可存储于数据库内,同时传输至集中监控中心,为电力隧道集中监控调度奠定基础,此外,可依托于智能监测机器人系统,将数据共享至安防、MIS系统、消防系统、运维站系统内。(2)通信层。其由光电转换器、网络交换机、多无线站点构成,上述设备均具有漫游功能,可实现基站与终端之间的高效通信,待完成数据采集后,所获得的数据可通过通信层进行传输,当有控制指令生成后,还可将控制指令快速下达传输。(3)终端层。其由机器人移动终端、轨道总成构成,终端层为智能监测机器人主要部分,是决定智能监测机器人功能情况的主要结构,在本次设计中,将终端层设置为运动承载系统、设备监测系统、通讯系统、机器人辅助系统、环境检测系统,以此实现数据全面采集,故下将从决定智能监测机器人功能的五大系统方面展开分析。电力隧道智能监测机器人系统整体设计情况如图1所示。
二、智能监测机器人在电力隧道中的设计应用
(一)运动承载系统
在电力隧道中,通常根据轨道形式确定存查检修路径,轨道路径局部爬坡、转弯结果,故电力隧道在实际运行中存在起伏、转弯情况,为了解电力隧道运行状况,防止风险发生,智能监测机器人需设置运动承载系统。在机器人运动承载系统设计中,应将爬坡扭矩、行进速度等关键因素考虑在内,用于确保智能监测机器人可在轨道内稳定行走。轨道结构存在上下坡度、连续转弯、水平转弯情况,在设计智能监测机器人运动承载系统时,应根据轨道加工技术与原理,在机器人运动承载系统内设置轨道导航,以此确定电力隧道管廊环境,并明确轨道的弯度、坡度、距离参数。完成上述参数设置后,需根据电力隧道监测检修需求确定智能监测机器人的运行速度及定位精度,在实际设计中,可将机器人运动速度设置在0~2米/秒范围内,而定位精度以±2厘米内为佳。为确保智能监测机器人可在电力隧道内实现灵活转向,且可稳定上下坡,应在机器人轨道运动平台内增设多元化运动功能,如转弯、爬坡、直线行进等,为智能监测机器人在电力隧道内高效巡检奠定良好基础。考虑到电力隧道内可能具有可燃性气体,智能监测机器人可设置多种取电方式,如滑线取电、锂电池供电等,还可在电力隧道内设置分布式充电站,以为确保机器人可获得充足的能源供给。
(二)通訊系统设计
在本次电力隧道智能监测机器人通讯系统设计中,为保障通讯效果而搭建了无线通讯、有线通讯两种模式,将无线漫游技术搭设在电力隧道通讯基站内,以无线漫游技术为纽带衔接前端智能监测机器人终端与后台控制中心,同时应用光纤环网链路,以此实现网络全覆盖,使智能监测机器人在电力隧道各个路径定位下均可在200Mbps的无线带宽下进行通讯。电力隧道智能监测机器人通讯系统在实际设计过程中共提出了多种通讯方案,一是漏波电缆通讯,二是电力线载波通讯,三是有线通讯与无线通讯相结合。对上述三种通讯方案进行分析,其中漏波电缆通讯能够良好适应电力隧道的起伏、弯曲环境,但通讯距离相对较短,为保障通讯效果,需连接光缆,此外,该通讯方式带宽有限,且建设成本较高,施工难度较大,因此经综合分析后,决定不采纳漏波电缆通讯方式。电力线载波通讯需设置滑束线作为信息传输媒介,但智能监测机器人在行进期间可能会造成滑束线摩擦,而电力隧道内可能存在可燃气体,若管控不当容易引发安全事故,因此并不采用该通讯方式。对有线通讯与无线通讯相结合的方式进行分析,发现该通讯模式效果较好,且不存在安全隐患,故选择该方式作为机器人通讯模式。
(三)设备监测系统
智能监测机器人需对电力隧道内部设备进行监测监督,为实现良好监测,可在设置可见光监控摄像机,当智能监测机器人执行智能监测机器人监测工作时,则可携带摄像机进行数据检测,以此了解内部设备外观质量及温度条件。借助前端摄像机完成外观、温度数据采集后,还可借助模式识别、图像处理等技术检测电缆,并经图像预处理及纹理分析,了解电力隧道设备的质量状况,进一步判断电力隧道内是否存有异常风险。除此之外,还可将红外测温仪设置在智能监测机器人上,在非接触模式下,即可借助红外图像采集电力隧道设备温度,使电力输电电缆温度可直观化呈现出来,继而实时了解电力隧道电缆温度情况。
(四)环境监测系统
为进一步保障智能监测机器人巡检效果,可机器人增设环境监测系统,主要用于检测电力隧道内气体及环境情况,分析综合管廊及电力隧道内部是否具有一氧化碳、硫化氢、氧气、燃气等气体,同时还可对电子隧道进行烟雾检测、温湿度检测,以此及时发现故障灾情隐患。
(五)辅助系统设计
智能监测机器人在电力隧道内主要负责日常巡视检修,为确保机器人可顺利完成工作,需在机器人实际设计中,需设计语音对讲功能、联动功能、避障功能等,用于辅助机器人更好地完成工作。(1)语音对讲功能。将对讲设备设置在机器人系统内,当机器人进行巡检时,后台管理人员可与现场人员进行实时交流,为应急控制奠定良好基础。(2)联动功能。电力隧道内存在其他监测设备,可将机器人与其他监测设备进行连接,以此实现电力隧道的综合性联动监测。(3)避障功能。电力隧道弯曲起伏,智能监测机器人在行进期间可能会遇见各类障碍,此时可设计障碍自动识别功能,避免机器人碰撞。
结束语:
综上所述,借助人工智能技术设计并应用智能监测机器人可实现无死角、持续化电力隧道监测,实时把控电力隧道运行状态,及时发现不稳定因素进行风险抑制。在电力隧道智能监测机器人设计与应用期间,应从运动承载系统、通讯系统、设备监测系统、环境监测系统、机器人辅助系统等方面展开设计应用。
参考文献:
[1]孙培培.基于地铁隧道三维模型的自动化变形监测方案研究[D].西安科技大学,2020.
[2]刘哲强.测量机器人在地铁隧道自动化变形监测中的应用[D].西安科技大学,2020.
