基于矿卡毫米波雷达的主动防撞预警系统
2022-06-30赵海平侯玉山张伟明范志鹏陈永旭冯晓光王姗姗周华生
赵海平,侯玉山,张伟明,范志鹏,陈永旭,冯晓光,王姗姗,周华生
(1.北京中企时代科技有限公司,内蒙古 通辽 028000;2.扎鲁特旗扎哈淖尔煤业有限公司,内蒙古 通辽 028000;3.内蒙古电投能源股份有限公司,内蒙古 通辽 028000;4.国家电投集团内蒙古白音华煤电有限公司,内蒙古 锡林郭勒 026200;5.北京踏歌智行科技有限公司,北京 100089)
我国幅员辽阔、矿产资源丰富,大中型露天矿区超过1 000 处。矿区生产大多采用半连续生产工艺,露天矿以百吨级大型矿卡运输岩矿的模式为主,但因矿用卡车体积庞大导致周围存在盲区,驾驶员视野范围受限,易造成交通事故。运输道路特殊,路线复杂多变,弯道、斜坡道较多和作业环境恶劣,导致伤亡事故频发,防碰撞自动刹车系统需求提升。
王洪峰以城市道路汽车主动避撞系统为应用背景,以单线激光雷达为主要传感器,根据雷达扫描特性,设计了一套具有自适应特性的车辆前方障碍物检测与跟踪算法[1];史惠敏提供了一种在不改变信号相位的情况下提高左转车辆安全的技术,通过该系统可实现对冲突等级的识别,为驾驶员提供碰撞预警[2];肖晨等在对地铁车辆应急驾驶防碰撞系统用户需求调研和总结基础上,分别从系统结构、关键技术、工作原理、系统功能、电气接口等方面对系统设计方案进行了概述,为后续地铁车辆应急驾驶防碰撞系统产品化和工程化研究提供了参考[3];何大凯等利用GPS 等设备的高精确性、可靠性和稳定性等进行开发利用,为作业机械的防碰撞策略提供研究支持[4]。但这些主防碰撞系统主要是面向结构化道路环境下的乘用车,并不适用于矿区复杂的道路环境。基于此,针对矿区应用场景的矿卡设计了一套新颖有效的毫米波雷达主动防撞预警系统,主动防撞预警系统能够有效的避免和缓解车辆碰撞、追尾等事故,为矿方避免人员安全事故、稳定生产提供有力保障。
1 主动防撞预警系统架构组成
主动防撞预警系统架构组成如图1。
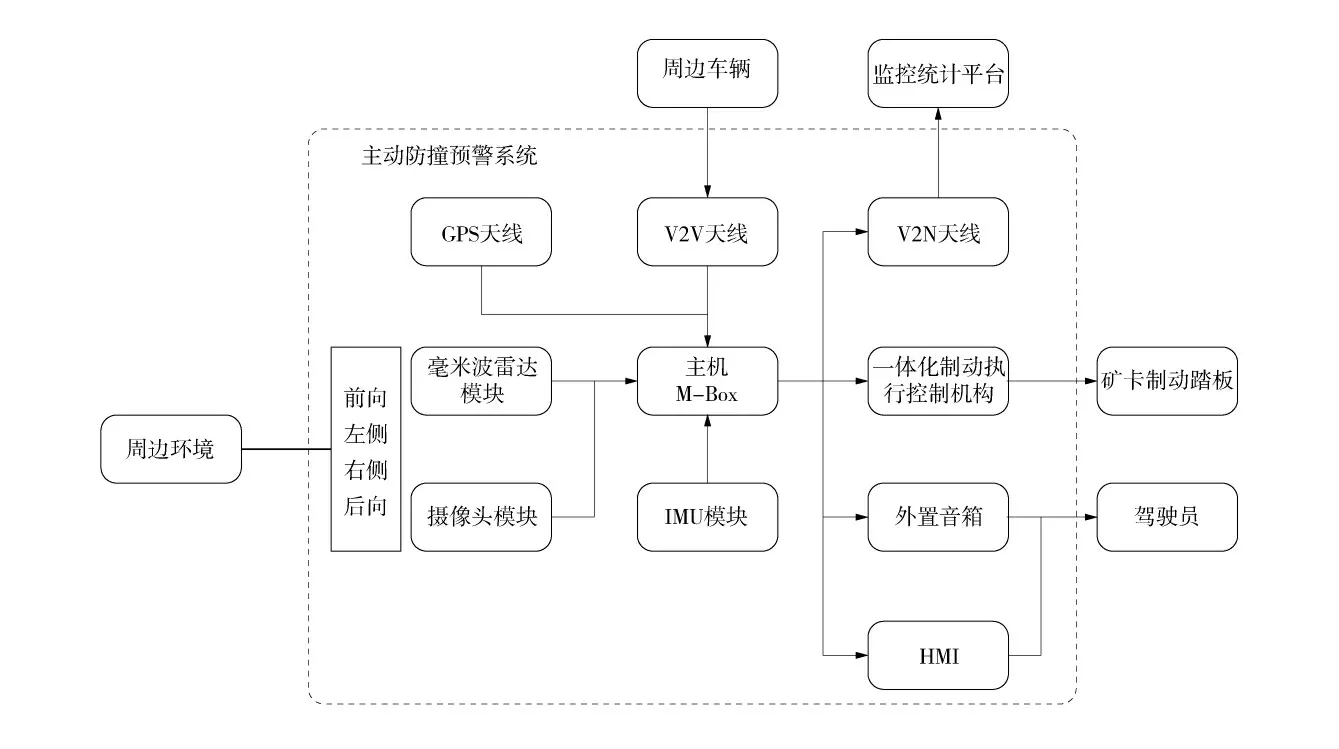
图1 主动防撞预警系统架构组成
系统是基于C-V2X 模块和高精度定位模块,通过V2I、V2V、V2P 通信,分享车辆位置信息,通过遍布车身摄像头、毫米波雷达、V2X 和高精度GPS 等感知模块,多重覆盖、相互校正,实时采集车身360°的障碍物信息,然后结合FPGA 高性能AI 处理器、高频多核智能处理器和车规安全处理器对采集信息进行处理,输入主机M-BOX 中进行车辆动作控制,当遭遇紧急危险状况时,主机M-BOX 中的主动防撞预警系统及时输出紧急制动动作,由一体化制动执行控制机构控制车辆准确、灵敏完成防撞任务。
2 主动防撞预警系统主要模块功能
2.1 摄像头模块
摄像头模块基于高性能的FPGA 平台,采用深度学习框架,通过尖端AI 处理算法,能精确识别乘用车、矿卡等多种车型,支持行人检测,支持线缆桥架、指示牌、岩堆挡墙等多种元素识别。同时通过对矿区元素定制化训练,能够精确识别大矿卡、电铲等矿区特种车辆。
2.2 毫米波雷达模块及数据融合处理
主动防撞预警系统采用ARS408 和SRR308 毫米波雷达传感器。通过合理的传感器布置,能起到良好的盲区检测效果。传感器具有优异的测量性能和高度的操作安全性,并能自动识别传感器和传感器环境的故障,非常坚固可靠耐用。充分利用了长距毫米波雷达测距优势,结合短距毫米波雷达广角特性,既能很好探测矿卡前方远距离障碍物又能更好覆盖了矿卡侧前方盲区。
充分精巧独特的传感器布置,利用长距毫米波雷达测距优势和广角特性,使用3 台组合布置的毫米波雷达,起到了优秀的盲区检测效果。布置3 台前向ARS408 毫米波雷达,既能很好探测矿卡前方远距离障碍物又能更好覆盖了矿卡侧前方盲区,覆盖左前侧至右前侧的检测区域。
采用了多传感器数据融合处理技术,通过毫米波雷达精确测距以及视觉系统对物体的精准识别,使得防撞预警系统的检测和避障目标更有效。
2.3 一体化制动执行控制模块
基于无人驾驶线控方案和制动执行方案,形成防撞系统一体化制动执行控制模块。具备控制电机执行机构和矿卡制动线控控制功能(电动轮可线控化改造),做到精确控制和反馈,具有安全、可靠、实时的特点。一体化制动执行控制模块,用可靠、安全的方案解决电动轮和机械轮矿卡的执行问题。
1)对于电动轮车型。通过对电制动和装载制动通过线控控制器,做到高精度(控制精度优于1%)、强实时(信号发出时延小于50 ms),同时可以精确采集(精度优于1%)人工电制动信号和自动电制动刹车信号,做到闭环反馈,进行合理决策和控制。
2)对于机械轮车型。通过控制电机执行机构控制机械制动踏板,做到及时响应制动,并结合机械制动信号,反馈给系统决策。
2.4 监控统计平台
主动防撞预警系统能够通过4G 网络,自动将雷达测距数据、刹车动作数据、刹车离合开闭数据、系统自检数据、系统运行数据、系统故障记录等数据远传至矿区调度指挥中心服务器内,同时通过部署在服务器上的监控统计平台,自动实时统计所有车辆上毫米波雷达自动刹车系统工作运转情况,并以报表形式展现出来,为管理者提供决策依据。
2.5 全景影像系统
全景影像终端是一款适用于大型矿卡、工程作业车辆的360°全景驾驶辅助系统,系统通过改造现有倒车影像系统及加装摄像头完成在车身周围前后左右的4 个超广角、高清夜视摄像头的运用,实时收集四周车身的高清视频画面,在图像处理器中经过图像拼接、畸变矫正、透视变换和融合等处理,最终合成车身周围360°的鸟瞰全景画面,并显示在车载显示屏上,为司机提供360°全景驾驶辅助。系统可帮助驾驶人员消除车身周围的视觉盲区,从而有效降低交通事故的发生概率[5-6]。同时,系统还具有4路高清录像功能,可为交通事故、突发事件等状况,提供有效证据、还原事故真相。
全景影像辅助系统显示,既提供了车身周围360°全景视图画面,也提供了车身前、后、左、右的单视图画面,单视图画面可根据车辆的行驶状态自动切换,还可通过薄膜按键切换出双边视图。全景影像系统特点:①高清夜视:在阴天或夜晚等弱光条件下,依旧可以保持高清画质;②智能轨迹:针对具有ESP的车型,系统内置智能行车轨迹线和倒车轨迹线,为行车、泊车提供精确指引;③倒车提示线:倒车时,后视图会显示倒车提示线,通过绿、黄、红3 种颜色,进行安全距离的预警,改善了该倒车功能的用户体验和实际作用,为司机的安全行车提供了有力保障[7];④车标自定义:用户可自定义车辆外观和颜色,满足多样化的用户需求;⑤图像调整:用户可根据使用需要,调整单视图的显示范围以及全景图像的亮度等;⑥高清录像:系统支持4 路高清视频同时记录,并可对关键视频进行保护,记录的视频既支持本地回放,也可支持PC 端播放;⑦外置存储:外接U 盘或移动硬盘(系统分U 盘版和硬盘版),最高支持2 TB 容量;⑧扩展功能:系统可根据客户需要最高支持挂接16 路雷达,对全景显示进行增强,并可通过声音进行提示和预警;⑨高度定制化:根据矿卡量身定制,解决矿卡盲区大的问题,其中鸟瞰拼接范围最大可超过800 m3;⑩智能化联动显示:根据防撞系统检测侧方盲区的危险性,自动切换到对应的侧方危险视频画面。
3 主动防碰撞预警系统主要特性
1)智能感知、多重检测。视觉感知基于深度学习框架,具有智能感知特性,多个毫米波雷达之间重叠覆盖检测,同时毫米波雷达与视觉进行融合检测,确保安全。
2)执行精确、响应快。通过一体化执行控制模块能够精确控制车辆电制动并做到快速响应,响应时间50 ms。
3)全方位预警、立体化显示。采用卫星定位和V2V 通信技术,解决卡车周围车辆的位置、运动方向、与本车之间的相对关系等问题。特别是对受到道路侧面挡墙的遮挡、弯道的遮挡或三角体遮挡的车辆应能及时准确发现、定位和预警[8-9]。通过V2X 超前感知,进行语音报警,联动全景影像进行车身周边视频显示,当车辆行驶前方出现障碍物小于安全距离时,该系统会发出刹车提醒信号,方便辅助司机判断前方情况提醒前方危险,在司机及时操作刹车踏板制动的情况下,自动刹车系统不会启动,人为操作优先;若司机未及时操作刹车踏板制动,则该系统先提示报警,再启动电缓行,车速下降,如危险持续,则进行刹停,并进行装载制动。危险排除后,司机手动按下“刹车制动解除按键”,使“刹车踏板”恢复原状,刹车状态解除[10]。
4)信息互通性。毫米波雷达主动防碰撞自动刹车系统、防撞预警系统之间具有信息互通,做到感知信息共享,相互确认,还可以根据实际需要,设置报警声音、预警灵敏度等信息,让预警更符合需求。
5)高适应性、高稳定性。能够适应露天矿现场恶劣环境,抗震、耐高温低温(-40~+75 ℃);能适用于任何车型,不影响原车结构、体积小、操作简易。在不同天气(白天、夜晚等)、不同的介质(粉尘、大雾等)、车辆不同运行姿态(同向、相向、弯道、平路、上坡、下坡、空车、重车等姿态可以通过传感器判断)条件下均应能够达到准确的防撞效果。
6)自检功能。系统在每次通电开机后都自动进行设备自检工作,自检结果会通过显示器和提醒司机。
4 实施应用情况
主动防撞预警系统分别在内蒙古电投能源股份有限公司南露天煤矿、扎鲁特旗扎哈淖尔煤业有限公司、国家电投集团内蒙古白音华煤电有限公司露天矿等进行了实施应用。
内蒙古电投能源股份有限公司南露天煤矿开采年限已有40 年历史,年核定产能1 800 万t。该矿于2019 年11 月开始使用前面提出的主动防撞预警系统,并在117 台矿用卡车上进行了系统安装。扎鲁特旗扎哈淖尔煤业有限公司位于霍林河煤田二采区,年核定产能1 800 万t,并于2020 年5 月开始使用主动防碰撞预警系统,在76 台矿用卡车车辆进行了安装。白音华二号矿是国家电投集团为实现跨区域煤电联营打造的又一煤源基地生产煤矿之一,该矿于2005 年开工建设,2010 年投运,2020 年4 月开始使用主动防碰撞预警系统,在24 台矿用卡车车辆上进行了安装。
主防碰撞系统应用期间,可以通过V2X 超前感知,进行语音报警,联动全景影像进行车身周边视频显示,在危险时刻进行前向避撞刹车,也可以通过传感器判断车辆是在转弯、倾斜、上坡、下坡等姿态,实现更有效、更精确的防撞效果;其次,该系统通过一体化执行控制模块可以做到快速响应,响应时间50 ms;此外,当车辆行驶前方出现障碍物小于安全距离时,先提示报警,再启动电缓行,车速下降,如危险持续,则进行刹停,并进行装载制动。系统在3 大矿区应用至今,一直保持零事故运营的佳绩。为矿用卡车的生产运营提供了较大的安全保证,变被动防撞为主动,极大的降低了矿区紧急事故发生率。
5 结语
提出了一套适用于矿区生产环境的主动防碰撞系统,并针对矿区生产环境需求进行了功能设计。当卡车与前方车辆有碰撞危险的情况下,主动防碰撞系统可以采取自动紧急制动措施,极大的降低了矿区紧急事故发生率,最大限度地减少了安全事故的发生,实现了矿区安全生产作业的目标,降低了夜间作业和疲劳驾驶的事故发生率,对保障矿区安全生产有重大意义。