露天矿无人矿卡调度系统架构与关键技术
2022-06-30史灵杰
史灵杰
(中煤平朔集团有限公司 生产技术管理中心,山西 朔州 036006)
露天开采具有生产规模大、资源采出率高、对环境影响小等优势,已经成为矿产资源开发的主要方式[1]。我国露天开采比例较高,目前开采方式以人工为主,成本、安全等问题一直是制约露天开采持续发展的重要难题。
露天矿山一般地处偏远,环境恶劣,以下问题愈发凸显:①招工难,一方面矿区运输需要经验丰富的驾驶员,而熟练技工本身稀缺,人员流动性又大,导致招聘工作日益困难,另一方面大部分矿区的运输司机职业病严重,加之年轻一代从业意愿低,老龄化、人力断层明显,劳动力短缺造成用工成本持续上升;②矿区劳动强度大、作业时间长、道路崎岖颠簸,极易引发车辆碰撞及侧翻事故,生产安全难以保障。据统计,我国露天矿卡车运输事故约占露天矿总事故的70%以上[2]。在国家安全监管政策下,矿方在生产安全面临严峻考验。
近年来,国家正逐步推进智慧矿山建设:2019年国家煤矿安全监察局公布《煤矿机器人重点研发目录》,将“露天矿卡车无人驾驶系统”列为重点实施项目;2020 年国家能源局等8 部委提出“到2025年,露天煤矿实现智能连续作业和无人化运输”。“少人则安、无人则安”已经成为共识,矿方对无人运输的需求日益迫切。
云计算、人工智能、5G 通讯[3]等技术的不断革新,为矿山无人驾驶技术的发展提供了良好的机遇。相较于开放道路下的自动驾驶场景,大型的基本封闭的矿区,道路相对简单,行人干扰程度低,行车速度要求低,成为自动驾驶方案落地的最佳场景之一。露天开采过程中地面运输尤为重要,运输系统的投资约占矿山基建总投资的60%,运输成本占采矿总成本的50%以上[4]。矿山运输无人化有利于降低矿山生产成本,增强矿山生产安全,优化剥离、采装、运输和地面生产过程,大幅提高矿山生产效率[5]。但是当前大部分矿山基于传统的人工调度,经常出现道路交通堵塞、铲运衔接不及时、车辆排队等问题,运输台班非生产时间占30%以上。因此,合理的调度是露天矿无人化运输的重中之重。
矿区生产过程是随机的、实时的,是一个缩小的动态变化的复杂系统[6],调度应侧重与生产实际相适配,努力克服场景的复杂性。当前研究主要还是针对有人车调度。为适应当前露天矿无人驾驶发展趋势,提出了一整套适用于露天矿无人运输场景的智能调度解决方案。整套系统已成功应用于我国某大型露天煤矿,实现了世界上首个极寒条件下的无人驾驶系统卡车编组运行。研究成果已经经过国家矿山检测中心检验,具有良好的推广前景。
1 研究现状
1.1 国外发展现状
露天矿卡车调度的研究始于20 世纪70 年代,早期调度系统是基于有线通讯的。80 年代初期,美国模块(Modular)公司引入计算机技术推出了DISPATCH 自动调度系统,90 年代进一步引入全球卫星定位系统。如今,DISPATCH 已升级为Intellimine,发展为包括车辆调度分配、混矿控制等功能的集成化平台。
大型矿用汽车制造商方面:日本小松(KOMATSU)推出综合性矿山车队自动化管理系统(Autonomous Haulage System,AHS),支持车辆调度、位置跟踪以及智能协作。至今小松公司宣布AHS 管理的无人矿卡超过260 辆;美国卡特彼勒(Caterpillar)推出矿山之星(MineStar)系统,通过这一系统,无人矿卡在自动调度之下循环装载-运输-卸载作业,截至目前,该系统管理的无人矿卡超过340 辆。
学术方面,Erkan Topal 等[7]研究了一种基于混合整数规划(MIP)的新模型用于车辆调度,力求维护成本最小化;Patterson 等[8]提供了一个原始的混合整数线性规划卡车调度运输模型,以最小化卡车和铲车的能源消耗;Souza 等[9]提出了一种混合贪婪随机自适应搜索与通用变量邻域搜索的启发式算法优化卡车调度;Mendes 等[10]提出了一种基于多目标遗传算法的调度方法,并在露天采矿测试场景验证了算法的竞争力。
1.2 国内发展现状
国内露天矿卡车调度系统研究起步相对较晚。1997 年,煤科总院抚顺分院等科研机构研发了“露天矿卡车电铲优化调度系统”,该系统在伊敏露天矿投入使用,为企业增效8%[11];2000 年,东方测控技术有限公司与鞍钢集团合作的矿卡调度系统成功应用于齐大山铁矿,提高了矿区的生产效率[12]。
调度模型方面,马义飞等[13]基于最优控制理论构建了多目标的卡车调度模型;赵勇等[14]提出了基于车流规划目标流率饱和度的露天矿卡车实时调度模型;邢军等[15]结合产量完成度和车流饱和度实现空/重车调度;算法求解方面,姚再兴等[16]利用遗传算法求解卡车调度分时优化;李勇等[17]提出了代双引子粒子群算法对露天矿运输调度模型进行解算的方法;张超等[18]提出基于改进蚁群算法的无人驾驶卡车调度问题求解方法;杨超等[19]提出了基于ACP方法的平行无人矿山系统方案,服务于调度/协同效率迭代优化;沈宇等[20]介绍了“车端感知、云端管控”的平行驾驶理论实现车路互动、多车协同。
当前露天矿卡调系统的研究主要还是面向有人驾驶的场景,算法一般多是仿真场景下进行验证,理论与实际结合的不够密切,很多在理论上行的通的方法在实际实施时会出现很大的偏差,对露天矿无人卡车调度与传统有人驾驶卡车调度、人工卡车调度模型的不同之处考虑不足。
2 露天矿无人矿卡调度系统架构
当前露天矿卡车调度系统在建模、求解等方面有大量的理论产出,但实践应用推广的不多。侧重理论与生产实际相协调,针对露天矿无人矿卡运输场景,构建了一个露天矿无人矿卡调度体系架构。露天矿无人矿卡调度系统架构如图1。
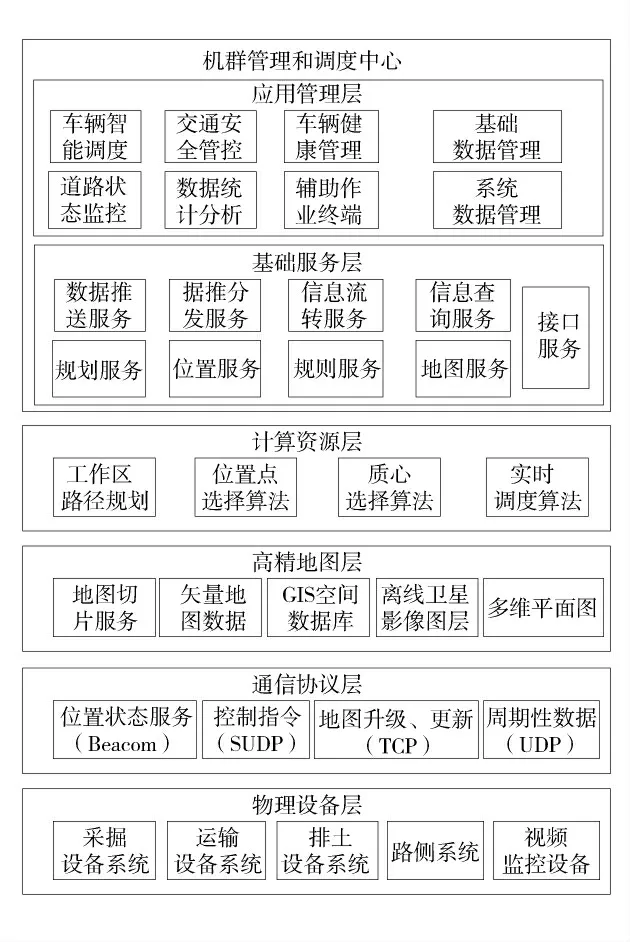
图1 露天矿无人矿卡调度系统架构
露天矿无人矿卡调度系统总体技术构架分为6个层次:①物理设备层;②通信协议层;③高精地图层;④计算资源层;⑤基础服务层;⑥应用管理层。其中,基础服务层与应用管理层构成了露天矿无人矿卡调度系统的业务中心,即机群管理和调度中心。
1)物理设备层。无人矿卡系统物理设备层结构如图2。系统适用于连接和调度无人矿山各种场景下的工程机械,包括运输、采掘设备等。此外系统引入路侧设备,用于辅助定位,视频监控设备承载数据采集。无人矿卡系统由V2X 通信模块与机群中心通信交互,通过ROS 与底层硬件通信交互。

图2 无人矿卡系统物理设备层结构
2)通信协议层。系统的网络层次结构见表1。系统支持无线Mesh 网络或者5G/4G方式进行组网,参考OSI 模型。根据数据业务的实时性、送达性需求选用不同的协议建立通信管道的套接字(Socket),主要有:SUDP、TCP、UDP、Beacon 等。这些通信协议将封装为库的形式供各系统模块程序调用。SUDP主要用于进场、离场、急停等控制命令;TCP 主要用于远程升级、地图数据、更新设置;UDP 主要用于周期性数据交互;Beacon 主要用于广播车辆位置、状态信息。

表1 系统的网络层次结构
3)高精地图层。高精地图-多图层管理结构如图3。地图环境数据是支撑无人驾驶运输业务的基础,包括地图切片服务、矢量地图数据、GIS 空间数据库、离线卫星影像图层、多维平台图,整体结构采用分图层、分层次的架构设计,并将底图、静态元素、计算资源和车辆设备划分到不同的图层中分别管理。

图3 高精地图-多图层管理结构
4)计算资源层。计算资源层结构如图4。计算资源指服务于露天矿无人运输调度运营相关的算法、模型、策略等,主体以算法为主,包括路径规划、(装载点/卸载点)位置点选择、(铲斗落铲)质心选择、实时调度等。计算资源层的基本要素由底层要素库和上层应用组件组成,要素库包括策略库、算法库、模型库等,可通过各类要素的选择和组合形成与实际场景匹配的计算资源。上层应用组件包括场景发生器、可视化工具、算法分析工具。场景发生器包含大量现场作业的数据,服务于现场问题的复现。可视化工具,可以跟踪与监控算法控制的过程。算法分析工具则通过实时采集和分析场景过程中产生的数据实现其优化目标,促进算法与生产实际相协作。
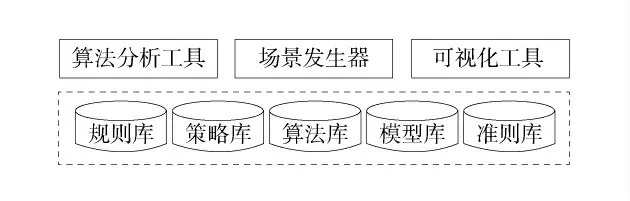
图4 计算资源层结构
5)机群管理和调度中心。机群管理和调度中心结构如图5。基础服务层和应用管理层构成了机群管理和调度中心,该中心采用前后端分离的B/S 结构设计;通过V2X 车联网协议与车载端组成C/S 工程模式。异步消息通过MQ 中间件实现;缓存和关系型数据库、空间数据库为系统提供数据层缓冲和持久层数据存储。

图5 机群管理和调度中心结构
3 关键技术
露天矿无人矿卡优化调度的目的就是用尽可能少的设备把尽可能多的物料从装载点运到卸载点,矿卡调度前,需要充分考察矿区的地理环境(地图技术),全面考虑采运排设备的位置(路径规划),结合管控避免车辆扎堆、堵车等现象(交通控制)等。
3.1 地图技术
不同的矿区,具有不同的地形条件,能够实现无人运输的首要条件就是需要构建露天矿的路网结构,地图技术是实现露天矿无人矿卡调度的基础的、必要的支撑技术,主要包括地图采集、地图编辑、地图更新技术。
1)地图采集技术。针对矿区特点将露天矿的路网结构分为2 大部分,即行驶区和作业区。一般通过激光雷达、组合惯导等传感器进行矿区道路数据采集;随着开采或卸载平面的移动,作业区边界将经常发生变化,可以利用无人机辅以采集新的边界,保持作业面内地图数据的实时更新与同步。
2)地图编辑技术。对采集后的道路坐标数据、道路高程数据、道路边界数据等地图数据经过文件或网络传输可导入地图编辑和处理系统之中进行加工处理。
3)地图更新技术。系统对编辑完成后的地图按照版本控制的方式与终端地图进行同步,主要分为3 种情况:①中心的地图版本更新之后主动通知车辆端进行版本更新;②在线车辆端采用地图版本周期性检查的方式与中心进行同步;③车辆端通过开机自检与中心比对地图版本,不一致则更新。多重机制保障车端与机群管理和调度中心地图的一致性。
3.2 路径规划
无人矿卡调度路径优化首先是要建立露天矿运输道路系统网络,然后在此路网基础上,利用路径规划算法求解最佳路径。最佳路线多根据图论、运筹学中最短路径的算法进行求解,常用的算法有迪杰斯特拉算法(Dijkstra)、弗洛伊德算法(Floyd)、A*等。
迪杰斯特拉算法比较适用于露天矿行驶区的路径规划求解。行驶区主要指露天矿中的运输干线,连接重要出入口、备停区以及各个作业面的入场点和出场点的行车道路。依照该算法,将采集的车道进行分段,利用区段构建出网络的边,区段与区段衔接点构建为网络的节点,可选每个区段的距离视为权重,这样可把露天矿的行驶区路网转化为带权的有向。
行驶区的行车路线大部分是确定的,往往数月或者数年才会发生变化,但是作业区则情况不同,运输道路随着生产作业的推进(装载点、卸载点的移动等)而频繁变化。作业面内的路径规划需要适配新的计算资源。系统考虑作业面内无人矿卡行驶特征,提出结合车辆的动力学模型的A*算法。该算法关键点在于对节点的估价标准,可达到的点必须满足:①达到该点的路径车辆可行驶,比如转向角度小于车辆的最大转向角;②到达该点的路径上不能有障碍物。此外,针对复杂作业面场景,为了减少搜索次数,系统计算资源中引入诸多曲线优化算法(Reeds-Shepp 曲线、回旋曲线等)以加快计算可行驶路径,并且路线更为平滑。
3.3 交通控制
无人矿卡调度是分配挖掘机与多台矿卡的协调合作权,服务于矿山设备集群化运营。为了提高通行效率、保障行车安全,交通控制技术必不可少。交通控制技术主要通过建立管控仲裁列表,按照制定的交通规则,协助无人矿卡进行自动行驶控制。该技术实现无人驾驶车辆的行车许可实时计算和分配:对交叉路口进行自动交通管控;根据不同权重对通行车辆进行路权控制;对发生异常情况的车辆进行及时的介入管控。
系统针对露天矿无人运输场景,设计了一套路权管理机制。行驶区域按照一定的规则划分成多个路段,用唯一的路段编号进行标识。机群管理和调度中心(交通安全管控模块)负责每一路段路权的管理和分配。路权管理交互图如图6。
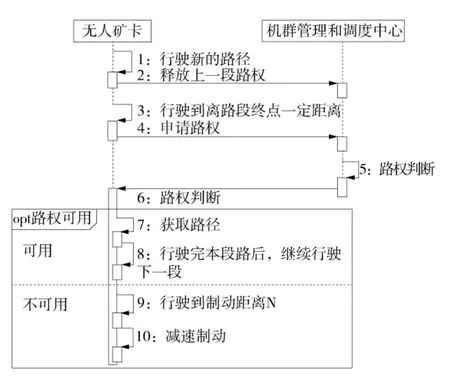
图6 路权管理交互图
3.4 智能调度
智能调度是实现露天矿无人矿卡调度最核心的技术。在充分考虑露天矿区的地理环境和地质状况的情况下,将生产作业过程中的各种参数(如设备数量、各作业面距离、装卸时间、装载能力等)进行动态考察,并根据“采运排”条件的变化以及任务排班的要求,对多种调度方法做出合理的优化组合,以达到最佳的调度方案。其目的是在采运排设备一定的情况下,最大限度减少矿山设备的非生产等待时间,提高无人运输运营效率。
智能调度关键问题在于车流规划和实时调度2个阶段:①车流规划是基于数学规划理论,在受多个约束条件下实现目标规划,用于确定所需运输设备的最佳规模,它是实时调度的根据;②实时调度是在应用从矿区常见的几个生产调度角度设定的调度准则的前提下,依据车流规划安排,根据矿区实时的运行情况找到一个适合矿区生产的整体调度最佳方案,是多种调度方法有机结合和优化分配。
系统的车流规划是结合露天矿无人矿卡场景特征设计。基于高频的矿卡位置、速度、载重、朝向等信息,利用大数据流式计算技术,分析每条道路上交通流密度,获取道路实时拥堵信息;融入道路拥堵情况,计算矿山中每个装载点和卸载点之间的最优路径,进一步获取每条最优路径的最佳流量。实时调度以车流规划为基础,根据系统中出现的随机情况按照不同的规则进行派车。实时调度本着尽量实现车流规划之原则,但是实际运行后不可避免导致车流的变化。因此,需要再次更新车流信息,两者交叠运行、不断迭代优化,从而实现整个系统的最优。
系统资源层支持多种调度准则:除常规的最早装车法、最大卡车法、最大电铲法、最小饱和度法、固定配车法,还支持比率法,基于产量完成度派车,提供对设备的调度优先级进行设置的功能。在不同的矿区条件下,根据运输状况的变化,综合各调度准则,确定具体准则的选用,可以使系统在不同场景下取得最优调度效果。
4 结语
露天矿无人化运输在市场需求、国家政策、技术成熟度、行业配套诸多因素叠加的背景下持续推进与发展,合理的调度在露天矿无人化运营过程愈发重要。在露天矿无人运输新场景下,传统的调度方法适配不足,需要新的改进与突破。对此提出了一套适用于露天矿无人运输场景的智能调度解决方案,给出了露天矿无人矿卡调度体系的基本框架,并对该架构的6 个层次进行了阐述,论述了实现该系统的4 个关键技术,对各个关键技术的实现方法进行了说明,研究结果为无人矿山智能调度建设的总体设计思想。