CAT发动机C7司机控器原理浅析及维护建议
2022-06-29陈劲松
陈劲松
摘 要:对 CAT发动机C7司机控器工作原理进行分析,并提出维护建议,避免在运行途中发生故障对列车运行造成影响,以维护正常的运输秩序。
关键词:司机控制器 电压 故障
CAT发动机C7型司机控制器,作为机车换向、调速的主令电器是司机用来操纵机车的一种手动电器,进而控制机车的运行方向及速度。它有着很好的技术指标,操纵扭矩约20N,预期回转使用寿命500000次,五个接线口分别是DC24V电源,GND接电源地,CANH接口通讯,CANL接口通讯,GND接地线。
1 工作原理
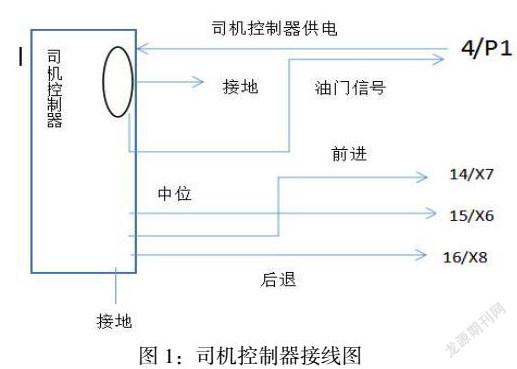
CAT发动机C7司机控器采用CAN、双模电压、单模电压或者PWM控制转速的发动机调速以及采用符合SAE J-1939协议的电控变速箱换挡控制,该司机控制器也可用于控制采用电磁阀换挡的变速箱。发动机上的油门控制器接收司控器信号以及输入的开关使能信号,将其转换为符合发动机和变速箱控制器要求的控制信号。
2 控制方式
CAT C7发动机的调速方式、变速箱的换挡方式、自动换挡参数以及司机控器的连接方式及参数都可以通过软件设定。通过控制器面板上的指示灯或者查阅说明代码,可以快速确定司机控制器的工作状态,为故障诊断提供了便利。另外通过软件检测也可以更加详细的了解司机控制器的各种状态。
3 电压信号
CAT发动机C7司机控器开关量输入高电平(24V)有效,继电器输出为常开输出型,正常工作时会跟随油门变化指示会进行由暗变亮或由亮变暗,对于发动机调速而言,两路电压或者一路PWM信号,其中两路电压信号成2:1的关系(V0=2*V1),为此可提供双模式或者单模式电压控制信号。而对于变速箱的换挡控制而言,本司机控制器同样提供两种控制方式:CAN通信方式或者电磁阀方式,其中电磁阀方式可设定为两档模式(前进档、后退档及空档),另外为了降低连接硬线数量,本司机控制器采用了通信的数字司机控制器,通过 J1939能够检测到发动机ECU控制电压,如电压异常,ECU会报告故障。
4 变速箱接线
4.1两档电磁阀控制接线方式
变速箱电磁阀的公共端和控制器21号端子上的信号可交换,也就是电磁阀公共端接地,而司机控制器21号端子接24V电源。Y0和Y2输出用于控制变扭器前进档和后退档继电器,Y1输出制动卸荷控制信号,Y3输出散热卸荷控制信号。正常运转时,Y1输出无效,Y3输出有效,通过拉手柄进行液力控制时,Y1输出有效,Y3输出无效。Y1信号可等效于反向保护输出。Y1和Y3可按实际需要接线,两档电磁阀挂挡除受手动使能及变扭器使能信号的控制外还受小运转模式使能输入及调车使能输入的控制。
4.2开关量输入、传感器及电源接线
开关量输入为高电平(24V)有效,接地或者悬空为无效输入。例如X1信号接24V,表示允许控制器制液力变扭器充油挂挡,当X1输入悬空或者接地时,表示禁止变扭器挂挡。
4.3控制参数设置
CAT发动机C7司机控制器具备RS-485通讯接口,可以通过该接口与计算机通信,用于油门控制器上的参数设置、状态显示和固件升级。在“发动机控制参数”选项中,控制方式有两种可选,分别为“电压”、“PWM”及“J1939”,其中“电压”方式通过改变控制器的输出电压来控制发动机的转速,PWM方式是通过改变占空比来控制发动机的转速,而J1939方式是通过CAN通讯的方式直接设定转速。
司机控制器可支持行车模式与吊车模式的动态切换,两种模式分别对应两个司机控制器,由于两种模式对发动机转速的限制有所不同,因此在“发动机控制参数”栏内,有两组控制电压范围设定,其中“最高控制电压”和“最低控制电压”对应于行车模式,而上车最高电压与上车最低电压应于吊车模式,电压大小的设定根据实际需求而定。
“电压变化速率”用于设置输出电压的变化快慢程度,设定值越小,那么输出电压变化越慢,反之则越快。注意电压变化过快可能会导致发动机ECU进入保护状态,而电压变化过慢会出现发动机转速响应过慢。
“换挡参数”栏内的“换挡速度回差”用于防止在理论换档点附近换档震荡。“换档点转速比”指在理论换档点处,车速信号转换成对应的液力变速箱的涡轮转速后与发动机转速的比值。
在“司机控制器参数”栏中,“中位死區”是指手柄离开中位多大的行程比例后,输出控制电压才开始增大。“前后极限位死区”是指手柄离极限位多大行程比例后,输出控制电压控制就达到最大值。死区的设定是为了防止达不到最大转速,或者在最大转速附近震荡。另外司机控制器的连接方式有“硬线”方式和“CAN”方式可选,注意上述的死区设定仅仅针对硬线连接方式,而采用“CAN”连接方式的司机控制器,死区功能一般由司机控制器内部的处理器处理。由于一台车有前端和后端两个操作台,对应的两个司机控制器的操作方向正好相反,为了方便系统接线,在控制器内部对采用“CAN”连线方式的司机控制器做了方向重映射,通过“交换前进后退方向”,可对实际司机控制器的前进与后退方向进行交换。另外当使用“CAN”总线连接方式的司机控制器时,此时司机控制器无方向输出,而车上的电气设备有时需要用到方向信号,因此当选中“方向信号输出”选项时,控制器会将当前司机控制器的方向输出。
5 故障维护
司机控制器的微小故障都会给机车带来很大的安全隐患,如“窜车”、电气设备接受错误指令产生误动作等,就会对设备安全及行车带来很大的威胁。因此,如何保证司机控制器的检修质量,提高其动作的可靠性就显得尤为重要,在排除故障之前,首先检查控制器供电,确保供电电压处于24V±30%(17-31V)范围内。电量不足,控制器起到欠压保护状态,检查线路是否接触不良,待速度上升电流增大通电有“阻碍”而断电,这往往就是虚焊,控制器问题,控制器内部原件虚焊或内部原件损坏。
5.1信号无效司控器无法提速
关闭变扭器使能开关或者排除急降信号故障,使能“控制器使能”信号。
5.2控制方式异常司控器无法提速
断开司机控制器输出的电压接线后,测量输出是否正常,断开司机控制器PWM输出接线,测量是否正常,观察CAN通讯指示灯,确保收发指示灯均正常闪烁,排除前进、后退或者中位开关接线是否异常,司机控制器检查开关组合逻辑处于中位状态。
5.3发动机无法达到最大转速
准确标定司机控器电压值,设置最大输出占空比,注意行车模式与吊车模式的差别。由于传统的模拟司机控制器存在必然的机械和电气误差,为了能够更加精确的使用司机控制器的整个有效行程,“控制器状态”选项卡提供了司机控制器行程设定功能,首先确定需要校准的司机控制器是属于行车模式还是吊车模式,使控制器处于该工作模式。如果是行车模式,那么先将司机控制器推至前进最大位,然后点击“手柄行程设定”按钮,此时界面上的“手柄位置”会显示100%,类似的,将司机控制器拉至反向最大位置,然后点击“手柄行车设定”可用于设定反向行程。在吊车模式下首先将“前进”开关闭合然后将司机控制器推至最大油门位置后点击“手柄行程设定”即可完成司机控制器的行程设定。
5.4无法挂挡
设置参数适当降低电压的变化率,或者放慢推拉司机控制器的速度。
5.5启动联锁无效
设定手柄行程、读取司机控制器参数、下载参数到控制器、校准控制器时间、读取司机控制器状态的这些操作均需要将PC和司机控制器通过RS485转RS-232电缆连接,点击“通信设定,”在通信设定选项卡界面上设置正确的通信参数。
5.6司控器位于零位时转速高于1000rpm
司机控器中的控制模块与控制手柄间出现间隙,导致控制手柄位置与实际转速不匹配。可采取调整、垫胶圈、紧固等方法,减小控制手柄与控制模块的间隙,对司控器做好机车运行時的振动缓冲保护,注重死角位置的维护;规范操作,避免出现转速急剧升降,操作台显示屏上应显示换向的“后”位,和控制的“牵引”区,控制手柄转至“牵引”区的转动角度逐渐增大时显示屏上显示的牵引级位应逐渐增大,完成牵引功能。
结束语
本文通过对司机控制器的作用原理进行分析,结合了现场发生故障的处理,提出了维护建议,为司机控制器的维修积累了宝贵的经验。
参考文献:
[1]张有松,朱龙驹。韶山4型电力机车[M].北京:中国铁道出版社.1998
[2]TI公司,ADS8364数据手册[Z].美国TI公司,2002.
