传统PID与模糊PID的仿真对比分析
2022-06-29赵纪付鹏朱飞宇
赵纪 付鹏 朱飞宇

摘 要:本文对传统PID控制以及模糊PID控制进行具体研究,首先对二者的控制方式以及工作原理进行了分析,并对控制对象的具体模型以及电路元素进行了设计,最后,对控制系统在Simulink仿真平台进行仿真分析,搭建整体控制系统,并对实验结果进行分析,得到了就控制结果来看,模糊PID控制比传统PID好的结论。
关键词:传统PID;模糊PID;Simulink仿真
1 引言
现如今,由于世界各国的需求越来越大,价值也在不断提高,LLC谐振变换器开始进入一些相关技术人员的研究视线范围内。
在如今的自动控制技术高速发展时期,伴随着自动控制技术中反馈概念的提出和研究,自动控制技术再次迎来了飞跃发展。其中,反馈理论主要包含三个关键要素,分别为精确测量、合理比较以及快速执行。而反馈主要便是通过实时输出与设定变量进行比较,得到误差值作为反馈变量,然后系统才能够得以纠正。
在反馈控制算法中,PID算法的应用范围最广,而且其参数“Kp、Ki、Kd”比较容易调整,并且可以根据不断的试验,一步步的进行调参,比较方便。而模糊控制是借鉴参考并利用了模糊数学中的一些理论,通过模糊和解模糊的步骤,对PID参数进行自行调整,使得控制更加的精确和快捷。
本文自行设计了控制系统,对于同一个控制对象,分别利用普通PID和模糊PID对系统进行仿真、得到仿真结果,最后对得到的仿真结果进行比较,得到结论。
2 基本原理
在普通PID控制器中, 包含三个主要参数(比例环节kp、积分环节ki、微分环节kd),其中,kp为比例增益;ki为积分增益;kd为微分增益。在设计控制器的过程中,主要问题便是不停地调整PID参数,以满足所设计的控制系统的参数要求,从而,使的我们所选定的被控对象有更优良的动态响应和静态响应。而模糊PID则是通过所制定的模糊规则,把输入参数和输出量模糊化、解模糊,完成对kp、ki、kd的动态调整,实现更快速地完成对系统的调整。这两种控制方式的Simulink仿真模型如图2-1所示,图中上半部分为模糊PID模型,下半部分为传统PID模型。
3 被控对象的选择以及控制结构设计
本文选择高频高压电源作为电路输入,输入一般为市电(380V交流电),输入端加设三相交流电抗器,用来降低主电源谐波、吸收电网的浪涌和峰值电流。并且可以保护电路中的其它电力电子元件、改善功率因数。
并且,在高频高压电源前端的整流电路中,让每个二极管都并联着电阻和电容,组成串联回路,RC阻容串联后可以组成吸收回路,起到抑制反向峰值电压(浪涌电压)的作用。在电气工程上称这个回路的作用为阻容吸收作用。
最后在整流电路的中间部分加上了滤波电容(C),其主要作用是储能滤波:当整流输出端电压为最大值时,在为负载供电的同时,还为其充电;当交流电换向时,整流输出端电压由最大值向最小转变,此时,电容里储存的电能向负载供电,如此反复,把脉动直流电变为相对平滑的直流电。
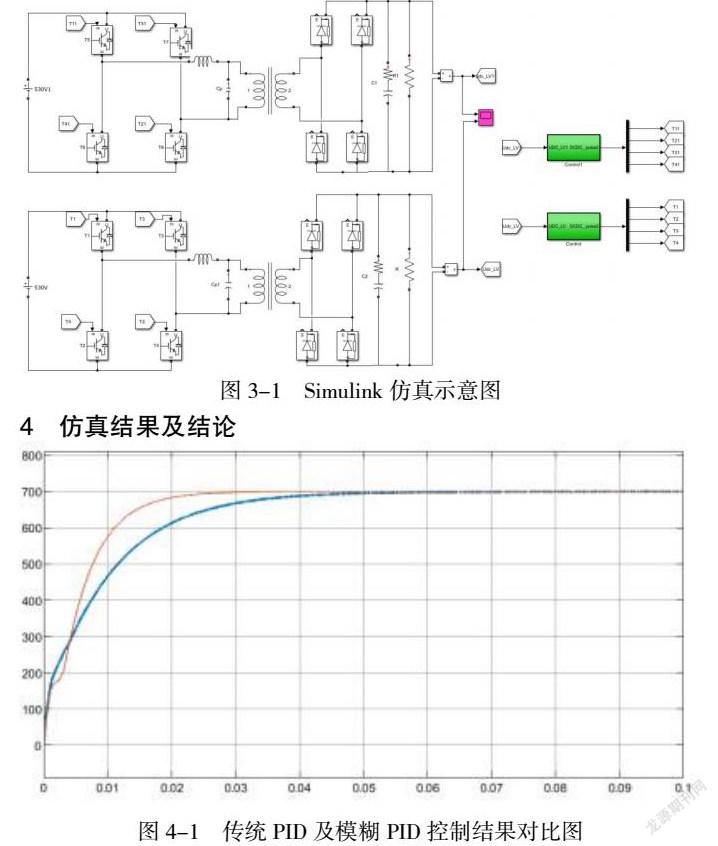
之后是LLC谐振变换器,把直流电转变为高频高压的交流电,再经过高压硅堆整流电路,变为高频高压的直流电,完成对输入市电的转换,其在MATLAB的Simulink仿真中搭建的控制模型如图3-1所示。
4 仿真结果及结论
利用MATLAB的SIMULINK 仿真工具,分别用PID控制法和模糊PID控制法对对象进行了仿真,通过对图4-1中两条曲线的比较,得出了一些结论。
首先是蓝色线(PID控制结果),在调节过程中,PID控制法所选用的各个环节的参数比较容易调得,但是调节时间稍长。然后是红色线(模糊PID控制法),其所选用的各个环节的参数比较难以调得,不容易达到预计值。但是模糊控制法易去掉超调、调节时间较短。
综上所述,模糊PID控制的时间比PID调节略微短些。虽然选用PID控制法较为简单,其所需参数也相较比较容易调得,但就控制结果来看,还是模糊PID控制比较好。
参考文献
[1]贺刚,蔡晓华,白阳,祝露,王德成,侯云涛.基于模糊PID的犊牛代乳粉奶液温度控制技术[J/OL].农业机械学报:1-12[2022-02-16]
[2]宿刚,刘浩,乔君丰,郑伟,李德辉,石景龙.适用于温度系统的预测自適应PID控制方法[J].吉林大学学报(信息科学版),2022,40(01):1-6.
[3]尹燕莉,黄学江,潘小亮,王利团,詹森,张鑫新.基于PID与Q-Learning的混合动力汽车队列分层控制[J/OL].吉林大学学报(工学版):1-11 [2022-02-16].
[4]王思孝,赵文军,张浩,高永,李普森.基于微分跟踪器的共轴反桨无人机串级TD-PID控制算法[J].浙江大学学报(工学版),2021,55(12):2359- 2364.
