双泵驱动潜孔钻车自适应调平行走液压系统设计分析
2022-06-29舒慧建李勇涛李雪龙祝燕清
舒慧建 李勇涛 李雪龙 祝燕清


摘 要:潜孔钻机是目前露天矿山在爆破孔钻凿中使用广泛的设备,其具有工作效率高、使用成本低、易于维护保养等特点,市场需求量大。目前,潜孔钻机行走和履带调平液压系统分别设置在行走和油缸动作两个相对独立的液压模块中。钻机在行走爬坡过程中,操作员需要先进行停车操作,将油路切换到油缸控制回路,并手动调节履带的调平角度以降低钻车的重心。本研究在现有潜孔钻车的基础上,提出一种履带自适应调平行走液压系统,在钻车爬坡过程中实现自动控制履带的调平角度,保证其在平路行走时,左右履带对起伏道路具有自适应功能。
关键词:潜孔钻车;AMEsim;自适应调平行走;液压
中图分类号:TD41 文献标志码:A 文章编号:1003-5168(2022)11-0030-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2022.11.006
Design and Analysis of Self-adjusting Parallel Tramming Hydraulic System Based on Double Pump Driven DTH Drill Rig
SHU Huijian1 LI Yongtao2 LI Xuelong3 ZHU Yanqing2
(1.Mechanical and Electrical Engineeriug College of Quzhou College of Technology,Quzhou 324000,China;
2.Zhejiang Kaishan Heavy Industry Co.Ltd.,Quzhou 324000,China;3.Zhejiang Kaishan Drilling Tools Co.Ltd.,Quzhou 324000,China)
Abstract:DTH drill rig is currently open pit mine blasting hole drilling equipment,with high work efficiency,low cost easy to maintain the characteristics of large market demand.At present,the tramming and track leveling hydraulic system of the mainstream DTH drilling rig are respectively set in two relatively independent hydraulic modules of tramming and cylinder action.In the process of climbing the rig,workers need to stop the rig first,switch the oil path to the cylinder control loop,and manually adjust the Angle of track leveling to adjust the center of gravity of the drill rig.In this paper,an adaptive parallel tramming hydraulic system is proposed based on the existing drilling rig,which can automatically control the leveling Angle of the track in the process of climbing.At the same time,the left and right tracks have the adaptive function of undulating road when walking on the flat road.
Keywords:DTH drill rig;AMEsim;adaptive adjustment parallel tramming;hydraulic
0 引言
隨着露天矿山潜孔钻车的大规模应用,操作人员对潜孔钻车的功能提出了更高的要求,尤其是在钻车行走的舒适性、操作的便捷性等方面。本研究在现有露天潜孔钻车的基础上,提出基于双齿轮泵驱动潜孔钻车履带自适应调平行走的液压系统设计方案,该方案的提出为潜孔钻车行走调平液压系统的设计提供了设计思路和参考,具有积极的工程实践指导意义[1]。
1 市场现状
双齿轮泵驱动的潜孔钻车因液压系统精简、产品结构简单、性价比高,在中低端露天潜孔钻车市场中占据绝大多数的份额。目前,该类型的钻车液压系统由钻车的行走、钻臂的定位、凿岩作业的推进回转三大功能系统组成(见图1)[2]。其中,通过液压系统中的液压马达来驱动潜孔钻车的“四轮一带”,从而实现钻车履带的行走功能。目前,许多简易型小型钻车甚至不具备履带调平功能。具备履带调平功能的钻车在行走及爬坡过程中,如遇到陡坡或钻车需转场登车时,要根据实际情况来及时调整钻车的调平油缸,从而实现对钻车重心的调整,避免因钻车重心过高而导致倾覆事故的发生。在此过程中,操作人员需要时刻观察车体重心的变化,并根据实际情况在钻臂定位及行走功能之间来回进行切换,进而实现钻车履带的调平角度与钻车重心的匹配。
2 现有钻车液压系统分析
在现有双泵驱动潜孔钻车市场中仍然有相当比例的设备并不具有履带调平功能,其在爬陡坡过程中重心无法随坡度的变化而进行相应的调节,导致操作困难,特别是在转场爬平板车的过程中存在着极大的安全隐患[3]。下面以该类型钻车液压系统为例,对现有双泵驱动钻车液压系统进行分析。该类型钻车主要由两个齿轮泵给钻车提供液压动力,液压泵通常由柴油机驱动(电动型或柴电双动力钻车的车体内还设置有电动机)。两个液压泵出口液压油通常先供给左右两个行走阀,分别用来控制两个行走马达的动作,而后左泵液压油通过左行走阀过桥给推进系统,并经过推进阀用于钻车钻孔作业时的推进动作,而后过桥给钻臂定位阀实现钻臂油缸的定位动作。右侧泵输出的液压油通过右行走阀过桥给回转马达供钻车凿岩工作时候的回转动作。潜孔钻车液压系统如图2所示。而具有履带调平功能的液压钻车通常是在图2所示的液压系统的基础上,增加钻车油缸定位多路阀中的阀片数量,实现对左右调平油缸的独立控制,从而调节履带角度,满足钻车重心变化的需求。B4580923-1B7C-4064-8555-C506F1A371D8
3 系统建模设计及参数设置
3.1 基本参数设置
通过AMEsim软件对设计方案进行系统建模及相关参数的设置。系统基本参数设置如表1所示。行走马达参数设置参考龙工(上海)精工液压有限公司JXD049型相关技术资料。
3.2 控制逻辑
系统的控制逻辑是在现有钻车的基础上,增设感知钻车车架倾角的传感器,通过逻辑控制器实时读取传感器的倾角数据[4]。同时,计算重心与履带调平角度的关系。当钻车在平路行走时,通过逻辑控制器将连接两油缸大小腔的通断阀打开。此时,左右调平油缸大小腔已经连通。当钻车单边履带遇到障碍物时,左右履带内部的液压油会根据钻车重心自动寻找钻车的平衡位置,从而实现钻车履带的自适应调整。钻车在爬陡坡时,逻辑控制器根据钻车倾角传感器测量到的数据来计算钻车的重心位置,进而通过三维四通电控阀来控制钻车左右履带的调平角度,从而适应爬坡时钻车重心的变化,尽量降低钻车的重心,避免因钻车重心过高而导致倾覆事故的发生。其主要控制逻辑如图3所示。
3.3 AMEsim软件建模
新设计的系统由三个功能模块组成,分别是左行走调平回路、右行走调平回路、自适应调平回路[5]。其中,左、右行走调平回路与现有钻车的行走回路相同,通过行走阀来控制左右行走液压马达,从而实现钻车的正常前进、后退、转弯等功能。自适应调平回路主要由二位三通电控阀、二位二通电控通断阀、左右调平油缸以及液压管路组成。设计方案中的AMEsim软件建模如图4所示。其中,主溢流阀的压力设定主要用于限定泵的最大工作压力,在钻车正常行车过程中并不开启,钻车爬陡坡的最大工作压力由左右行走溢流阀来调定。正常情况下,行走马达一般都带有液压刹车,所以控制液压马达的行走阀的中位机选择Y型,从而确保马达在非行走姿态能够正常刹车、驻车。而用于控制调平油缸的控制阀则采用具有O型中位机能的三位四通阀,以模拟调平油缸在非调平或钻孔作业时履带能够锁死,避免左右油缸间的相互串油,使钻车的姿态发生变化,影响正常钻孔作业。
3.4 计算分析
在AMEsim软件中设定系统模拟时间总长为10 s,数据采样间隔为0.1 s。
路况模拟1。给左右马达行走减速机输入一个最小8 000 N·m、最大15 000 N·m的随机变量,用于模拟较大爬坡角度时的钻车路况。从模拟结果来看,当一个较大的爬坡扭矩出现后,钻车的左右行走马达迅速达到溢流阀的最大设定压力,与实际情况相符。
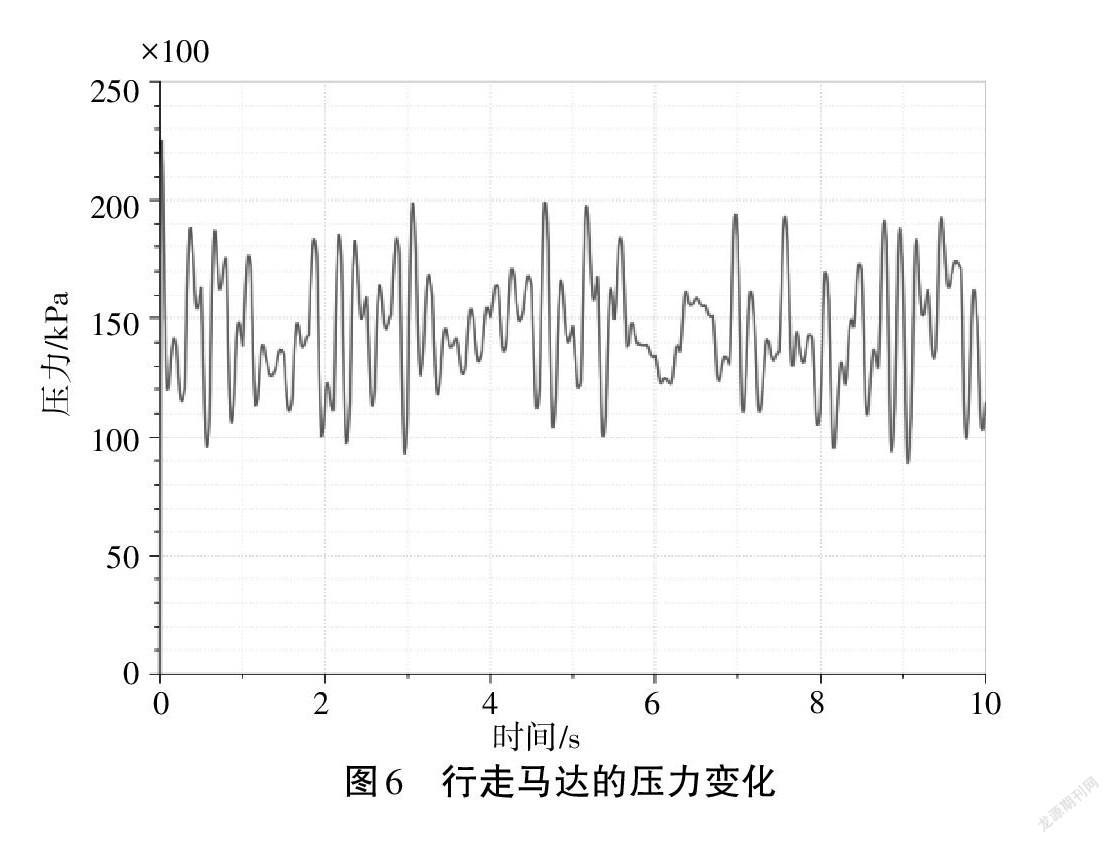
路况模拟2。给左右马达行走减速机输入一个最小5 000 N·m、最大8 000 N·m的随机变量,用于模拟钻车较小爬坡角度时的路况,随机负载如图5所示。从模拟结果来看,当钻车在比较平缓的爬坡角度上行走时,左右行走马达的压力随负载值的变化而变化,且趋势与外界负载大小变化一致,与实际情况相符合。模拟结果如图6所示。
通过AMEsim软件对以上两种路况进行模拟,可以看出装备自适应调平装置系统的潜孔钻车在爬坡路况下,行走压力变化与实际情况相符,且趋势一致,能够满足钻车正常行走及爬坡的系统设计要求。
4 结语
本研究所述的钻车履带自适应调平行走液压系统能够满足双齿轮泵驱动的潜孔钻车的行走及履带调平功能的基本设计需求,可以实现钻车在爬坡过程中,根据路面坡度情况自动调整履带的角度,以降低钻车重心的变化需要。同时,在平路行走时,可实现左右履带对路面起伏状态的自适应。该设计方案可为潜孔钻车液压系统的设计改进提供新的思路、依据和参考。
参考文献:
[1] 郭勇,周振华.潜孔钻机的应用现状与发展趋势[J].矿业快报,2008(4):13-15.
[2] 朱世通.露天凿岩穿孔设备发展概况及趋势[J].科技风,2014(2):28-30.
[3] 阿特拉斯·科普柯.產品技术资料[EB/OL].(2022-05-10)[2022-05-15].http://www.atlascopco.com.cn/zh-cn.
[4] 郭艳.潜孔钻机推进回转自适应系统模糊控制研究[D].湖南:中南大学,2011:32-43.
[5] 高斌.潜孔钻机回转液压系统动态特性研究[D].湖南:中南大学,2008:22-41.B4580923-1B7C-4064-8555-C506F1A371D8
