基于视觉的接触网绝缘子识别定位研究
2022-06-28展明星王致诚李致远
展明星 王致诚 李致远









【摘要:】绝缘子串的精确定位是实现其故障检测的重要前提。文章针对目前接触网绝缘子巡检图像中绝缘子串检测算法定位不精确的问题,提出一种双目视觉结合SURF特征的目标识别定位方法。由于绝缘子所处位置环境复杂,采用SURF特征可实现目标识别的前期粗定位;根据双目视觉原理求取已经粗定位识别出物体的三维坐标,实现目标物体的识别与细定位;通过这些方法保存识别出物体形心的三维坐标,传输给巡检机器人,以便控制机器人调整检测位置。实验结果证明,此方法有较好的识别效率和准确性,可以成功地识别出目标,具有一定的工程应用价值。
【关键词:】绝缘子;双目视觉;SURF算法;复杂背景;图像识别
U225.4+3A561844
0 引言
绝缘子是铁路接触网的重要部件,主要功能是对接地体保持电气绝缘,起到支撑接触网电缆和防止电流回地的作用。绝缘子长期暴露在户外会产生一定程度的污染和破损,导致电气性能下降并影响绝缘强度。保持绝缘子清洁能有效降低污闪事故的发生,众多学者也为此开展了对绝缘子当前状态监测的研究。隨着机器视觉技术的不断发展,以其为基础的智能检测技术开始逐渐应用到铁路巡检设备中。由于接触网绝缘子被各种电线支架包围,造成检测过程中精确识别的难度加大,因此如何提高机器视觉的识别能力具有重要的研究意义。
目前主要通过人工方式或者根据电气特性对绝缘子状态进行检测,但实际应用中,人工检测方式效率低下,与自动化检测的安全性要求相比,仍有相当大的距离。而电气特性检测方法的稳定性较差,极易受到周边环境的影响[1-2]。文献[3]针对稳定性较差问题提出一种加入现场可编程门阵列硬件加速方法,应用于电力巡检无人机,通过坐标转换关系计算偏转角的差值,进而得到绝缘子前端定位。文献[4]采用交替优化的策略,增加反馈机制调节卷积核的大小和个数,依据语义误差信息熵测度指标评价结果,进而实现反复推敲比对后的检测结果。这些方法在检测图像缺陷方面做出了改进,但存在着识别过程计算量大,图像去除干扰能力较差的问题。例如航拍图像中若存在复杂背景,如高压线、树杈、鸟巢等都会导致目标绝缘子特征不明显。因此,本文提出一种基于双目视觉结合区域特征的图像匹配方法,对接触网绝缘子进行识别。采用SURF(Speeded up robust feature)算法,来提高绝缘子识别过程中的速度和准确性。利用双目摄像头模拟人眼,获取被测物体的二维图像,再对其图像进行识别与匹配,然后根据视差原理计算得出物体的三维空间坐标,最后将定位坐标传输给巡检机器人,以便巡检机器人实现位置的控制和调整,从而得到更精确的检测。本文算法在定位精度和速度方面表现出了良好的性能,具有一定的工程实际应用价值。
本文重点研究作用于接触网绝缘子的巡检机器人视觉识别系统,提出一种双目视觉结合区域特征的图像匹配方法,对接触网绝缘子进行识别,实现对待检测绝缘子的识别定位,提高机器人巡检效率,减少因人员疏忽、漏检等因素造成的安全隐患。
1 基于SURF特征的目标识别
SURF算法是由BAYH提出的,在SIFT(Scale-invariant feature transform,尺度不变特征变换)算法基础上引入了Hessian矩阵,并加入了积分图像和盒子滤波器,大大提高了计算速度,节省了程序运行时间,对于形状、位置相对固定的接触网绝缘子自动化检测具有较强的实时性[5]。
1.1 SURF特征匹配
1.1.1 提取特征点
SURF算法是在SIFT算法的基础上引入了Hessian矩阵及积分图像[6]。将目标图像和高斯函数做卷积运算,加入盒子滤波器代替高斯核函数进行卷积运算,得到图像和高斯函数的卷积,并将其转换成积分图像与高斯二阶导数模板的卷积运算,此时的高斯二阶导数模板实际上已变成一些简单的权重区域组合,将卷积运算转换为积分图像的加减运算。因此,可以提高图像特征点提取速度。上述的Hessian矩阵的行列式在尺度空间中每层的局部最大值即为特征点。
1.1.2 构建特征描述符
优质的特征描述符应具有较好的鲁棒性不受外界条件干扰,在光照、视角以及噪声的干扰下仍能保持不变。在SURF算法中,统计特征点领域内的Haar小波特征,不统计其梯度直方图。通过Haar小波响应累加值和最大值的确定为主方向,同时为了保证特征向量具有旋转不变性,选择特征点为中心,沿着基准方向构建正方形区域,经过Haar小波响应最终形成例如一个64维的特征向量组成的特征描述符。这种方法可避免傅里叶变换得原函数在正余弦不同频率下的系数,而是得到原函数在不同尺度小波(这里采用Haar小波)下的系数。
1.1.3 特征匹配
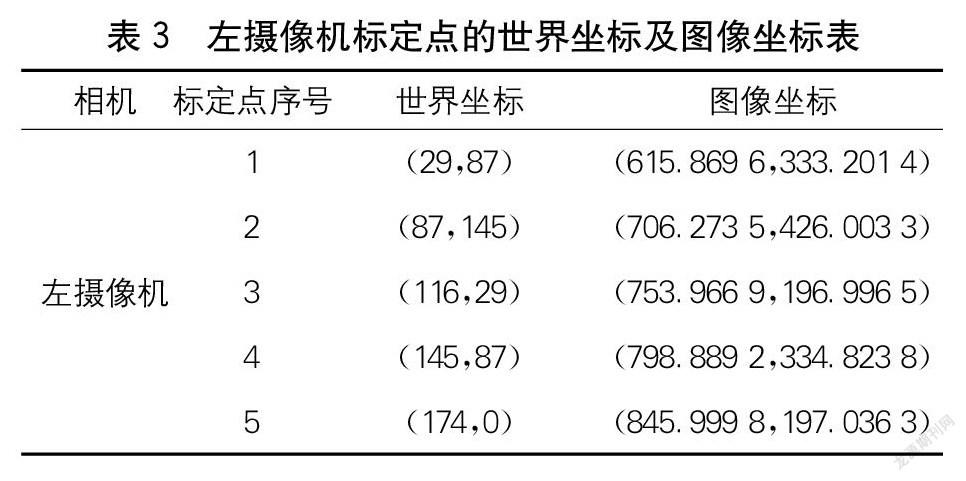
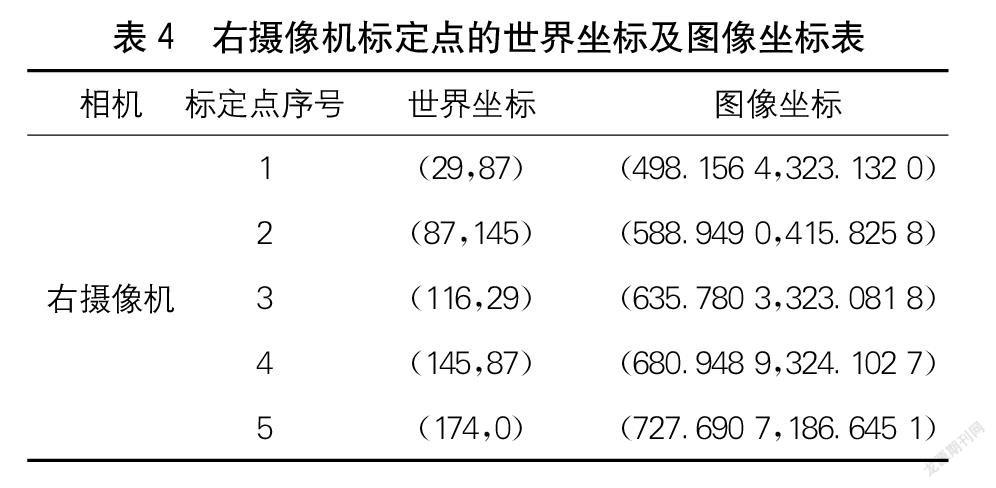
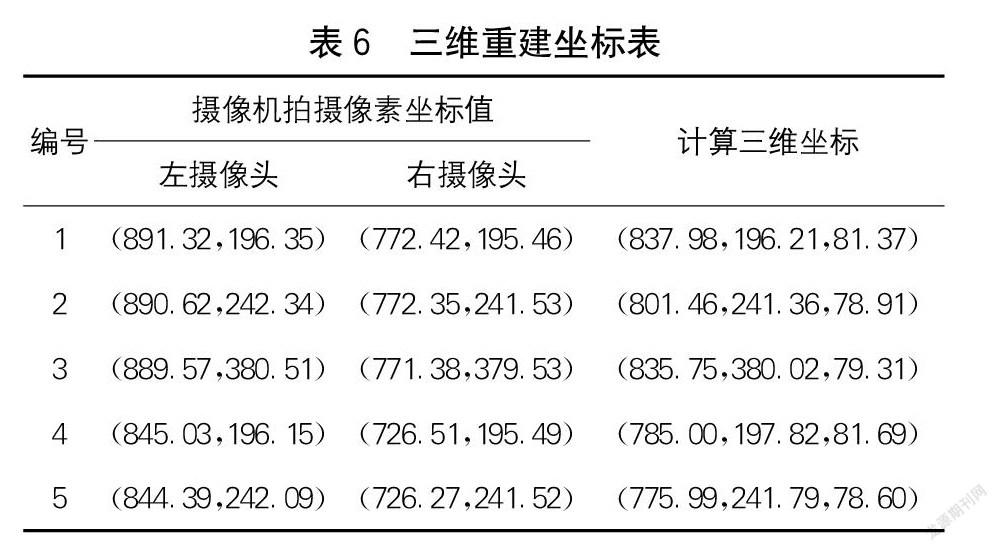
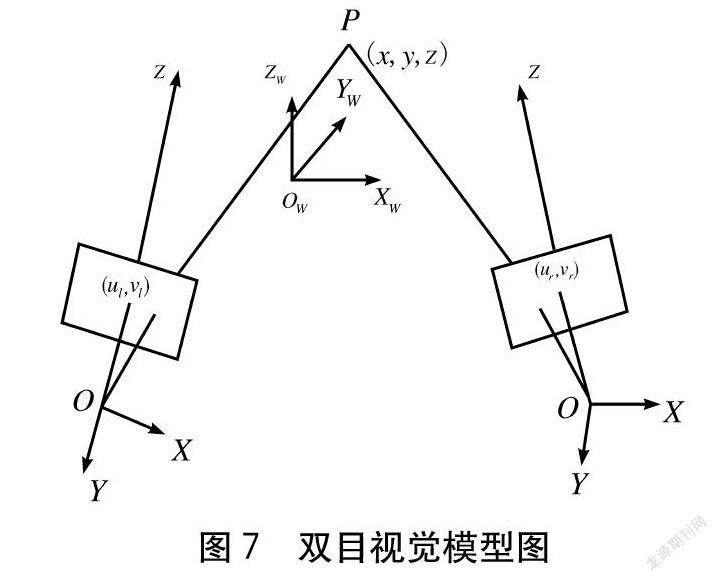
提取特征点之后对待匹配区域图像与标准模板图像进行匹配,SURF算法采用最近邻域匹配方法。首先计算待匹配图像到标准模板图像上特征点的欧氏距离,得出对应的距离集合,然后通过排序得到最小距离d1以及次最小欧氏距离d2。设定一个阈值T,当d1和d2的比值小于该阈值,即d1/d2 1.2 目标识别 为了从复杂的背景中识别出目标物体,预先建立检测目标的特征模板库。如图1所示,取简单的场景作为背景,调整相机角度,采集目标物体在不同角度下的图像,利用SURF算法提取图像的特征点,并将提取出的特征点向量进行保存。由于目标背景特征相对简单,集中目标物体的特征点描述要多于其他干扰物的特征点描述。 建立好特征模板之后,将目标物体置于其他复杂场景中,采集应用场景待匹配的图像,提取图像的特征点,将待匹配图像与模板的特征描述进行匹配,若成功匹配点的数目达到了一定数量,则认为该场景中有匹配的目标,从而实现目标物体的识别。如图2和图3所示为绝缘子的匹配识别效果图。 通过采用相同的识别图像对比SURF算法和SIFT算法,结果如表1所示,SURF匹配总数少于SIFT,但是准确数目要高于SIFT,同时所花费的时间上明显低于SIFT。所以,采用SURF算法进行识别更能满足一定的实时性要求。 1.3 提取粗定位的绝缘子 经过SURF算法前期的粗定位,绝缘子外部环境的干扰大大减少,剔除了接触网支架、电缆等对绝缘子特征的干扰。为减小光照对识别效果的影响,选择HSV(Hue、Saturation、Value)颜色模型提取光照影响最小的分量,采用最大类间方差法(Otsu)对绝缘子图像进行阈值分割。如图4所示,对分割后的图像进行形态学处理,提取出绝缘子轮廓图像。 2 基于双目视觉的目标定位 双目立体视觉是使用计算机模拟人眼的视觉功能,人的双眼对看到的场景具有深度感知的能力,双目立体视觉即仿照这种效应原理。可以利用两台规格型号一致的摄像机,同时获取相同场景下目标的二维图像,找出两个摄像机采集图像中相对应的匹配点,然后根据双目视觉成像原理,计算两个图像像素点所对应的场景中点的三维信息,得出场景中点的位置信息,在进行立体匹配之前,需要对使用的双目摄像机进行标定,以获取摄像机参数。 2.1 摄像机标定 摄像机标定是一个确定摄像机内部参数(焦距、图像中心、畸变系数等)和外部参数[R(旋转)矩阵、T(平移)矩阵]的过程,其目的是建立起目标物体像素坐标系与真实三维世界坐标系之间的关系。标定用的照片由左右相机同时拍摄,因为只有同时拍摄才能得到同一物理点在左右相机图像平面上的投影。本文采用Matlab标定工具箱,对实验所用双目摄像头进行标定矫正,利用黑白棋盘方格标定,采集目标在旋转不同角度情况下的一系列图像。相机坐标系下两台摄像机的3D立体示意图如图5所示,摄像机参数如表2所示。 2.2 计算三维坐标 将对识别出来的绝缘子定为待检测区域,如图6所示求取识别出来待检测的区域的质心,保存质心坐标,就可以控制巡检机器人根据质心位置在一定范围内进行位置调整,以捕获绝缘子整体信息。 双目视觉模型图如图7所示。在世界坐标系下,空间点P(x,y,z)在两个相机成像平面的图像坐标分别记作P1(ul,vl)、P2(ur,vr),由摄像机针孔成像模型,可得: zlulvl1 =Mlxyz1 =ml11ml12ml13 ml21ml22ml23 ml31ml32ml33 ml14ml24ml24 xyz1 (1) zrurvr1 =Mrxyz1 =mr11mr12mr13mr21mr22mr23mr31mr32m33 mr14m24mr34 xyz1(2) 式中:Ml,Mr——左右两个摄像机的投影矩阵。 化简为:AP=b。 其中: A=ml31ul-ml11ml32ul-ml12ml33ul-ml13ml31vl-ml21ml32vl-ml22ml33vl-ml23mr31ur-mr11mr31ur-mr11mr31ur-mr11 mr31vr-mr21mr32vr-mr22mr33vr-mr23(3) p=xyzT (4) b=ml14-ml34ulml24-ml34vlmr14-mr34urmr24-mr34vr (5) 根據最小二乘法[12],求得空间P的三维坐标: P=ATA-1ATb (6) 3 实验结果与分析 本文实验采用USB双目摄像头进行图像采集与测量。设置摄像距离为80 cm,图片分辨率为1 280×720。采用棋盘标定板,求解出图像像素坐标与世界坐标之间的联系。 如表6所示,通过实验求取并计算三维重建坐标,第一行为上文中绝缘子的质心坐标。在左摄像机中像素坐标为(891.32,196.35),在右摄像机中像素坐标为(772.42,195.46),两个坐标中的纵坐标基本相等,说明两摄像头近似保持在同一水平。然后,计算得出质点三维坐标(837.98,196.2 81.37),其中,81.37(Z轴坐标)表示目标物体(绝缘子质心)距离摄像头平面的距离,非常接近于测量值80,且误差范围<4%。见表3~5。 4 结语 本文研究了基于双目视觉的接触网绝缘子识别与定位的整个过程,在识别阶段,针对复杂背景下识别困难问题,使用基于SURF算法的模板匹配识别目标,先建立简单目标的模板库,以确保单一的目标特征,可以较好地识别目标,而且实验证明SURF算法特征提取比SIFT算法速度要快。在定位阶段,利用双目视觉原理提取出目标的三维信息,确定其质心位置。实验证明,计算得出的位置误差<4%。根据所求得的位置,可以进一步控制巡检机器人调整视觉位置,捕获更精确的绝缘子信息,对其进行破损、裂纹等检测。 参考文献: [1]黄 绘.绝缘锚段关节处常见弓网事故的分析与预防[J].西部交通科技,2020(8):151-152,158. [2]李艳军.高速铁路动车组不断电过分相技术研究[J].西部交通科技,2020(2):152-155. [3]苏 超,杨 强.基于机器视觉深度学习的绝缘子前端定位方法[J].广东电力,2019,32(9):33-40. [4]张 倩,王建平,李帷韬.基于反馈机制的卷积神经网络绝缘子状态检测方法[J].电工技术学报,2019,34(16):3 311-3 321. [5]闫海峰,李佳洁,王新宇.高速铁路货运动车组列车开行条件研究[J].西部交通科技,2019(2):146-149. [6]王致诚,孟建军.基于高阶滑模方法的永磁同步电机控制系统研究[J].制造业自动化,202 43(1):8-11.