基于Sentinel-2影像的围海养殖信息提取
2022-06-27李轶平吴英超尤广然孔重人席小慧雷利元赵东洋
李轶平 ,吴英超 ,尤广然 ,孔重人 ,席小慧 ,雷利元 ,赵东洋*
(1. 辽宁省海洋水产科学研究院, 辽宁 大连116023;2. 大连市海域海岛开发与保护研究重点实验室, 辽宁 大连116023)
我国近海野生渔业资源日益退化,而人们对海产品的需求却不断增长,这使得近年来我国的海水养殖业发展迅猛[1]。根据《中国渔业统计年鉴》[2-4],截至2020 年,我国海水养殖面积达 199.56万hm2,海水养殖产量达 2 135.3万t,占世界海水养殖总量的80%[5-6],高居世界第一,所以,我国是海水养殖大国,也是世界上唯一的养殖产量超过捕捞产量的国家[7]。海水养殖在不断满足人民日益增长的海产品需求的同时也出现了由于过度养殖所引起的爆发性水产病害问题、浒苔爆发等环境问题、大规模围海养殖散乱分布影响船舶通航等海上交通问题[8],以及占用湿地、破坏自然岸线等问题。围海养殖区域作为承载海水养殖的主体,对海水养殖的规划发展起着基础性作用。如何准确掌握围海养殖的分布区域并进行科学合理的规划,对保护海洋生态环境和促进海水养殖业的可持续发展具有重要意义[8-10]。
围海养殖区域调查通常采用实地测量的方法,但该方法因受人力和物力的限制难以满足现场信息即时获取和大范围作业的需求[1,11]。遥感作为一项成熟的对地观测技术,其具有覆盖范围广、可同步连续观测,以及高空间分辨率、高时间分辨率等优点,这些优点可弥补传统方法的不足[12-13]。采用遥感技术、利用遥感图像能够快速准确地提取出海水养殖所需的专题信息,并在养殖区域的动态监测、科学规划与管理中发挥作用[7-8,14-15]。近年来很多学者利用遥感手段提取养殖区域信息,例如:武易天等[8]基于LandSat-8影像,运用光谱和纹理信息结合的方式提取近海网箱式和浮绳式养殖区;卢业伟等[10]基于Rapideye多光谱影像,利用纹理阈值检测结合形状判断提取渔排和海带/紫菜养殖区;程博等[11]利用国产高分系列影像通过构建水体指数和纹理特征提取筏式养殖区与渔排网箱养殖区两种近海养殖区信息;任源鑫等[16]通过构建新型混合水体指数提取具有平原及山地背景下的陕西宝鸡市复杂地域水体;等等。但目前的研究中均未提及针对海参围海养殖的遥感信息提取方法。
本文选取养殖水体分布复杂且堤坝、工厂化养殖等交错分布的海参围海养殖区域作为实验区,基于Sentinel-2遥感影像,选用归一化差异水体指数(Normalized Difference Water Index,NDWI)[17]、改进归一化差异水体指数(Modified Normalized Difference Water Index,MNDWI)[18]和增强水体指数(Enhanced Water Index,EWI)[19]三种水体指数,测试其提取效果,并使用同期高空间分辨率的高分二号(GF-2)卫星影像作为参考,验证不同方法的提取精度,最终通过提取结果掌握研究区域内围海养殖的分布情况。
1 研究区域
本文选取大连瓦房店红沿河附近海域(121°28′~128°32′E,39°44′~39°47′N)为研究区域,该区域海参围海养殖分布集中,数量众多,在遥感图像中易于识别,表现为多边形的规则排列(图1)。
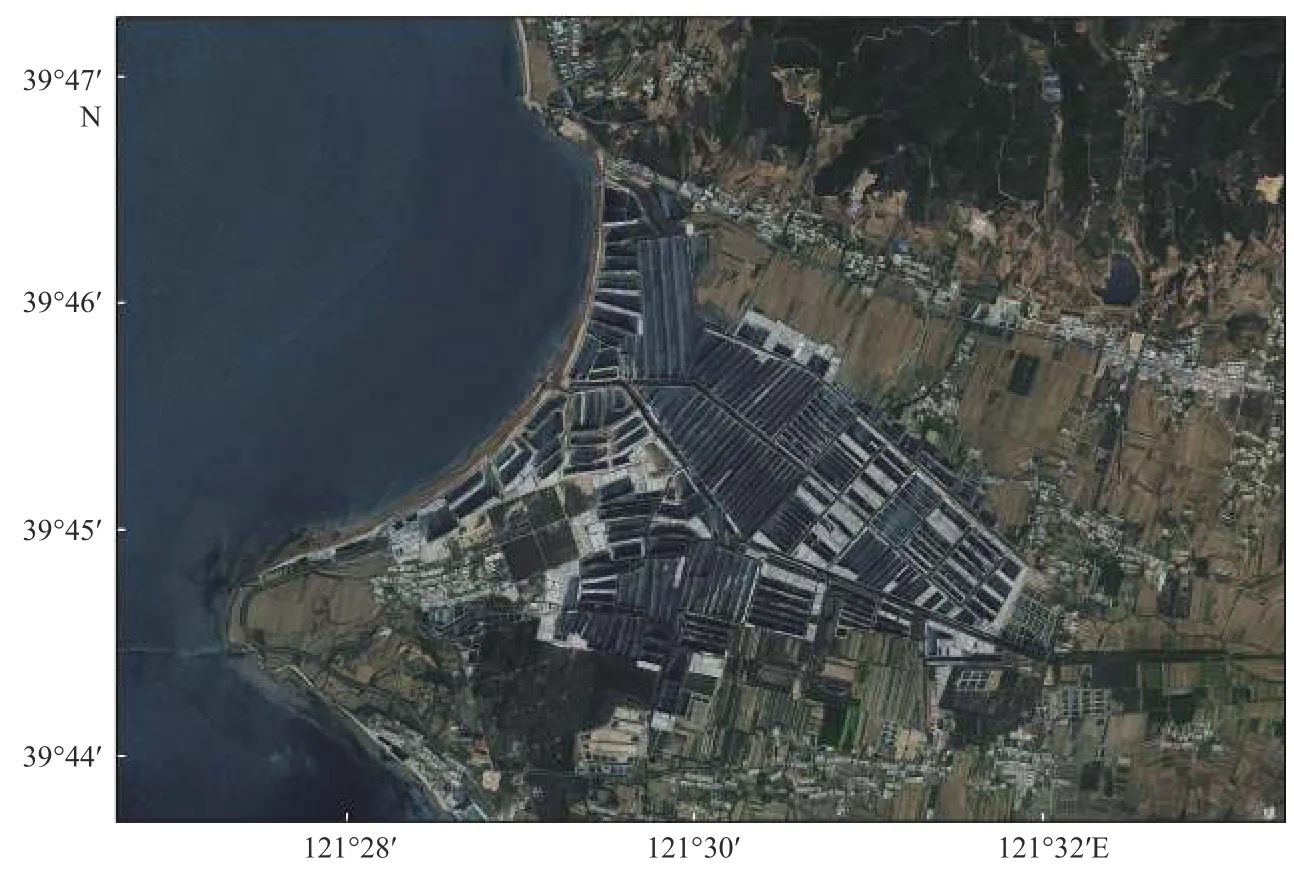
图1 研究区遥感图像Fig. 1 Remote sensing images of the study area
2 数据来源和研究方法
2.1 数据来源
实验数据为Sentinel-2卫星拍摄的遥感影像数据[20],该数据具有空间分辨率高、重复周期短和覆盖波长范围广等特点[21],由欧洲“哥白尼计划”发射的第2颗携带多光谱成像仪卫星[22]观测获得,其搭载了具有13个波段的多光谱成像传感器,由可见光波段覆盖至短波红外波段,分辨率分为3类,分别为10 m、20 m和60 m,具有10 d的高效重返周期。
精度验证数据为GF-2卫星影像数据。GF-2卫星采用ZY1000卫星平台,光学成像系统由2台相机组合而成,同时具有全色和多光谱成像能力,地面像元分辨率优于1 m全色和4 m多光谱,幅宽达到45 km[23]。
选取云量较少、质量较好、成像时间为2020年10月的Sentinel-2和GF-2影像,影像区域范围约为30 km2。实验使用的Sentinel-2、GF-2遥感影像数据参数见表1。

表1 卫星遥感数据Table 1 Parameters of the satellite remote sensing images
影像的预处理为影像数据的纠正与重建过程,主要是改正遥感成像过程中由传感器外在原因(如姿态、高度、速度和大气干扰等因素)所致的遥感影像的几何畸变与信息误差[24],该过程通常包括辐射定标、大气校正、图像融合和影像镶嵌裁剪等[22]。本实验选用的Sentinel-2数据是经过正射校正和几何校正的大气表观反射率产品(Level-1C,L1C),但没有进行辐射定标和大气校正,所以,本研究在提取围海养殖矢量信息之前,需要利用SNAP软件的Sen2cor插件对L1C数据进行辐射定标和大气校正,同时将全部波段重采样至10 m,处理后形成大气底层反射率数据(Level-2A,L2A)[25]。
2.2 研究方法
2.2.1 光谱特征分析
养殖水体对入射光具有强吸收性,在大部分遥感传感器的波长范围内,呈现较弱的反射率,并随波长的增加而减弱[26],即蓝绿光波段短(表2),其反射率却高,所以其对入射光的吸收弱;而短波红外波段波段长(表2),其反射率反而较低,所以对入射光的吸收较强[27-28]。

表2 Sentinel-2波段特征Table 2 Characteristics of the Sentinel-2 bands
2.2.2 水体指数方法
水体指数方法是根据波段比值法[29]原理,利用反射波段与吸收波段的比值处理增强地物之间的波谱差异,以使湿度信息明显的地物获得最大的亮度增幅,同时抑制其他背景地物亮度[19]的方法。目前,常用的水体指数主要有NDWI、MNDWI和EWI。本文分别采用这3种水体指数提取实验区的海参围海养殖水体信息。
1)归一化差异水体指数(NDWI)方法
基于植被指数(Normalized Difference Vegetation Index,NDVI)的比值原理,McFeeters[17]在1996年提出了归一化差异水体指数(NDWI),该指数经波段比值运算,利用波段之间的反差增强了水体的显示亮度,从而突出影像中水体的显示效果,其计算公式为:

式中:LG和LNIR分别为绿光波段(对应于Sentinel-2影像的B3波段)和近红外波段(对应于Sentinel-2影像的B8波段)像元亮度值。
2)改进的归一化差异水体指数(MNDWI)方法
在分析NDWI的基础上,徐涵秋[18]针对城市水体改进了NDWI指数的波段组合方式,使用短波红外波段(SWIR)替换了近红外波段(NIR),提出了改进的归一化差异水体指数MNDWI,用于抑制居民地和土壤信息,其计算公式为:

式中,LG和LSWIR分别为绿光波段(对应Sentinel-2影像的B3波段)和短波红外波段(对应Sentinel-2影像的B11波段)像元亮度值。
3)增强水体指数(EWI)方法
针对半干旱地区的水体,闫霈等[19]在构造归一化指数的同时引入了近红外波段与短波红外波段,提出了增强水体指数EWI,其计算公式为:

式中,LG、LNIR和LSWIR分别为绿光波段(对应Sentinel-2影像的B3波段)、近红外波段(对应Sentinel-2影像的B8波段)和短波红外波段(对应Sentinel-2影像的B11波段)像元亮度值。
4)确定阈值
利用3种水体指数法所获取的图像可以突出水体与其他地物之间的光谱差异,但是若要提取边界信息,还需要使用阈值对图像进行分割。理论上,水体指数提取的分割阈值均为0,但在实际操作中仍需要根据具体场景对阈值进行调整,以达到最优的分割效果[8,15]。
本文采用Otsu算法[30]确定分割阈值[25]。Otsu算法又称最大类间方差法,是由日本学者Otsu Nobuyuki于1979年提出的一种确定图像二值化分割阈值的算法,其原理是:将图像的灰度直方图利用某一阈值分割为两部分,即两个类别,它们分别拥有最大的类间方差与最小的类内方差,这个阈值就是最优分割阈值[10-11]。
2.2.3 评价方法
混淆矩阵方法[16]是通过将每个地表真实像元与分类图像中的相应位置和分类进行比较计算,获得比较阵列的像元数的方法。矩阵中,“列”通常表示验证数据,“行”通常表示由遥感数据分类得到的类别数据。本文采用混淆矩阵方法获取总体精度、Kappa系数、错分误差和漏分误差等精度评价指标,进而评价分类图像精度。总体精度能够反映分类正确的比例,Kappa系数能够检验分类结果和实际结果的一致性,错分误差和漏分误差分别可以检验错分和漏分的像元数[31]。
3 结果与分析
3.1 实验结果
对比原始影像(图2a)与采用3种水体指数法运算获取的水体指数图像(图2b至图2d)可知:与原始影像相比,3种水体指数图像中水体显示亮度都出现了增强。其中:利用NDWI所得图像增强效果最好,在该图像上可以探测到更微细的信息(图2b);MNDWI和EWI未能完整体现出水体和背景地物的差别,因为这2个图像中存在较多的干扰信息和阴影杂质(图2b和图2c)。

图2 Sentinel-2原始影像和采用3种水体指数法运算获取的水体指数图像Fig. 2 The original Sentinel-2 image and the images obtained by using 3 water indices
采用Otsu算法最终确定了NDWI、MNDWI和EWI三种水体指数的分割阈值,其分别为0、−0.1和−0.4。根据阈值对水体指数图像进行分割,结果如图3所示。由图3可以看出:利用3种水体指数方法均能有效提取围海养殖矢量信息,其中NDWI所提取的图斑完整、形状规则,与围海养殖水体匹配度高(图3a);而MNDWI和EWI提取出的图斑相对零散,噪声杂质较多,与围海养殖水体匹配度较低(图3b和图3c)。采用NDWI方法可以去除围海养殖周边堤坝及工厂化养殖等建筑物所导致的阴影杂质,排除干扰信息;采用MNDWI和EWI方法虽然可以有效提取出储水量较低的围海养殖信息,但同时也提取出了部分建筑物和植被等无效信息。
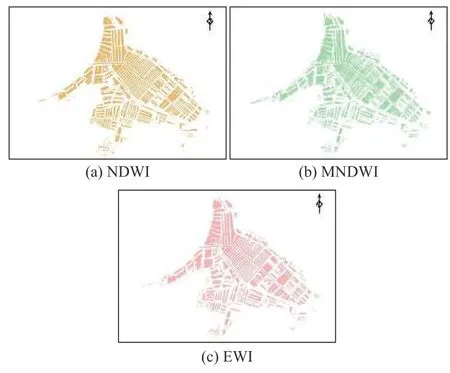
图3 利用Otsu算法分割的围海养殖矢量Fig. 3 The sea-enclosed aquaculture vectors obtained by segmentation with Otsu algorithm
3.2 精度评价
为定量分析利用3种水体指数方法所获取的围海养殖矢量信息的有效性和可靠性,本文依据遥感影像对围海养殖矢量信息进行精度评价:首先对校验影像GF-2进行辐射定标和大气校正,并与Sentinel-2数据进行几何配准;然后基于GF-2,采用目视解译结合野外验证的方式获取实验区的围海养殖分类图斑,如图4所示,该图经实地验证为实验区围海养殖分布的真实反映;最后,结合图4利用混淆矩阵的方法对分割结果进行精度评价[28]。

图4 GF-2目视解译围海养殖分类图斑Fig. 4 Sea-enclosed aquaculture classification spots obtained by visual interpretation of GF-2 images
在区域范围内随机选取100个验证点,如图5所示。根据分类结果构建混淆矩阵,对3种方法做出精度评价,得出验证点分类精度,如表3所示。

表3 提取结果精度指标Table 3 Precision indices of the extracted results

图5 GF-2影像及验证点Fig. 5 GF-2 image and verifed points
由表3可知,利用NDWI方法比利用MNDWI和EWI两种方法得到的总体分类精度高,说明NDWI分类准确率更高,对阴影信息的区分度更好;利用NDWI方法获得的Kappa系数最高,为0.540 7,说明其分类结果和实际结果的一致性最好;利用MNDWI和EWI方法获得的错分误差和漏分误差偏高,且利用这2种方法提取的图像不仅在阴影信息上存在着许多错分现象,还在对非水体信息的提取中存在着错分和漏分。所以,相较于MNDWI和EWI,利用NDWI方法提取研究区域的围海养殖信息的精度最高,有更好的适用性。
4 结 论
本文基于Sentinel-2卫星影像,利用其空间分辨率的优势提取围海养殖信息,实现了研究区围海养殖水体信息提取。采用NDWI、MNDWI和EWI三种水体指数分别提取出实验区的围海养殖区域的水体指数图像,再运用Otsu算法阈值分割水体指数图像,最终获得围海养殖的矢量数据。主要结论如下:
1)在对实验区的围海养殖的影像信息提取方面,NDWI方法比MNDWI和EWI方法有更高的精度和更好的适用性,且能够有效、完整地获得围海养殖矢量信息;MNDWI和EWI存在一定程度的误提和漏提现象。
2)基于Sentinel-2影像B3和B8波段所构建的NDWI在有效提取水体矢量信息的基础上可以过滤阴影信息,故此方法对养殖池塘分布密集、与工厂化养殖等交错分布的海参围海养殖区域有更好的适用性。
3)MNDWI和EWI两种指数的结合虽然能够过滤大量无效信息,但其精度偏低,究其原因,是在提取水体矢量信息的过程中存在少量错分现象,从而造成最终结果中部分信息缺失。
4)Sentinel-2传感器中绿光波段和短波红外波段的空间分辨率不一致(B3和B8均为10 m,B11为20 m),导致MNDWI和EWI在提取结果中出现类似混合像元的问题,降低了提取精度。
5)EWI较NDWI在近红外波段基础上引入了短波红外波段,可以起到增强水体信息、抑制背景信息效果,但相比于混合像元的影响,增强水体信息的效果并未显现,其提取精度介于NDWI和MNDWI之间。
本文采用水体指数法能够在较复杂地物背景下获取围海养殖矢量信息,但该方法存在不能很好地解决“异物同谱”、在分类结果中会产生“椒盐”噪声等不足[1,7],在提取过程中也未考虑生物生长情况和围海养殖利用情况对提取的影响,会导致部分区域出现错分现象,这些问题将在后续研究中结合多时相遥感数据对围海养殖区域变化进行更深入的探讨。