基于连续体结构的软机器人驱动系统设计
2022-06-27金淼金敏敏罗婷婷刘光丽杨润怀
金淼,金敏敏,罗婷婷,刘光丽,杨润怀
安徽医科大学 生物医学工程学院,安徽 合肥 230032
引言
随着手术器械的变革,为了提高微创手术的创伤性、精准性、稳定性,制造出更小、更加灵活的手术器械[1-2],经自然腔道内镜手术(Natural Orifice Transluminal Endoscopic Surgery,NOTES) 的 概 念 也 随 之 产 生[3]。NOTES为不需要经过皮肤切口对患者进行治疗的全新的外科手术方法,其通过自然腔道(例如口腔、阴道和尿道等)将柔性内镜置入体内达到对疾病进行诊疗的目的[4];利用光纤将激光能量从激光源转移到目标位置有望实现体内狭窄空间的光热治疗或光动力治疗[5]。激光辅助手术已经在医疗领域广泛使用[6],但目前先进的外科激光系统并不适用于弯曲、复杂、狭窄空间环境下的内镜手术中[5],而连续体机器人可以到达人体的迂回区域,进行精确的手术[7]。另一方面手动操作柔性光纤是较为困难的,这就促使了光纤与外科手术操作手相结合[8]。
连续体机器人是目前主流的外科手术操作手,但是,目前广泛应用的软体机器人多是基于气动或者液压驱动的机器人[9-11]。这些机器人可以提供较大的驱动力,普遍的特点是驱动设备较为庞大,而且不能摆脱繁琐笨重的有线驱动装置,这就限制了这些机器人在医疗中的实际应用,所以摆脱庞大的驱动系统是必要的[12-17]。为了满足复杂约束的狭窄空间内的手术需求,摆脱复杂的驱动系统,本文设计了一款尺寸小巧、结构简单、基于线控的连续体结构、可以用于NOTES的软机器人驱动系统。系统的设计包括驱动模块、激光模块、内窥镜和触觉反馈设备几部分,为缩小尺寸,驱动模块和激光模块均内置于直径为7 mm的线控连续体机械臂中。
1 系统组成
本文提出的软机器人系统包括驱动模块、激光模块、内窥镜和触觉反馈设备,见图1。驱动模块是由基于线控连续体结构的机械臂和电滑轨组成的机械臂系统,电滑轨驱动机械臂的整体运动,连续体结构负责驱动控制内置于机械臂中的光纤。激光模块是由激光器和激光光纤组成,激光器作为光纤的激光源,光纤负责将激光传输到人体中的目标位置。内窥镜是由可以传输图像的光纤、相机以及可以处理图像信息的主机设备组成。内窥镜负责监控激光在体内的行为,实时地将手术画面传输给操作者。Geomagic Touch操作手是一款具有触觉反馈的设备,操作手的集成使得机器人系统拥有真实的触觉感知。
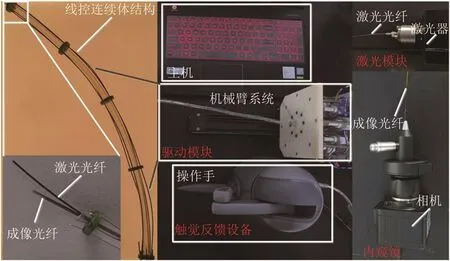
图1 系统硬件组成图
操作者通过握持并移动操作手手柄向操作手传达运动指令,主机将指令解析完成传输给机械臂,从而控制机械臂的运动。机械臂系统的运动将带有激光能量的光纤运送到目标位置并在该位置发挥作用。在此过程中,内窥镜始终监控激光的行为,将拍摄到的手术画面传输到主机设备上显示,设备将从手术画面中读取触觉信息,并且与操作手通讯将触觉反馈给操作者。Geomagic Touch操作手的二次开发和图像处理部分是将视觉转化为触觉反馈的内容,该内容是另一个独立的、完整的工作体系,见图2。

图2 系统工作流程图
2 驱动模块设计
2.1 连续体结构设计
驱动模块是基于线控的连续体结构[18-22],线控连续体结构相比于液压气压驱动的连续体结构,可以摆脱复杂的液压和气压控制系统使结构更加紧凑[23]。线控结构更加精确,具有更高的负载能力和可控性[24]。本文中连续体结构利用的是绳索的柔性和中空套管的弹性,两者的拮抗作用固定结构的位姿,其由带孔的圆盘、牵引丝和中空套管组成,见图3。

图3 连续体结构模型图
中空套管为结构的主干,套管在长度方向上分布着八个圆盘,圆盘在套管上的位置固定。前四个圆盘由两对长牵引丝控制,后四个圆盘由两对短牵引丝控制。每对牵引丝对应一对电机,每对电机对应一个自由度,电机在驱动时会向着相反方向运动。类似于等臂杠杆两端的运动,两个电机运动的位移相同,但是方向相反。
连续体结构的一些参数影响着结构的变形能力。对于NOTES来说,要求机械臂的尺寸越小越好,而机械臂的整体尺寸由圆盘控制,圆盘的直径需要尽可能地缩小。但是,圆盘的空间会影响到中间的套管和边缘的牵引丝的距离,这个距离通过仿真发现会影响机械臂的形变量。所以在机械臂的设计上,要在尽可能小的尺寸下达到较大的工作空间。考虑到多种结构参数的影响,需要多组数据,验证需要大量时间和材料,所以对该结构进行了有限元分析,图4是不同直径的牵引丝和不同直径圆盘在相同牵引条件下圆心距对变形量的影响,可以看出:① 变形量与圆盘直径没有直接相关;牵引丝的直径和圆心距是影响变形量的参数。在保证了大变形量下的牵引丝直径和圆心距,最小的圆盘直径6 mm;② 牵引丝的直径也影响着变形量,对比0.2 mm和0.5 mm的牵引丝,0.2 mm牵引丝在相同的条件下整体的变形量大于0.5 mm的牵引丝;另一方面牵引丝直径越小,越利于结构小型化;③ 是圆心距与变形量的关系,相同条件下圆心距越大,变形量越大。但是仿真的最优参数在实际应用中会存在一定的偏差,圆心距不能无限大,在对连续体尺寸、变形量以及制造难度的权衡之下,最终制作圆盘过程中使用的参数分别是:圆盘直径7 mm,牵引丝直径0.5 mm,圆心距2.7 mm。这个尺寸下的连续体结构可以降低制作和加工的难度,同时也不损失变形量。

图4 连续体结构各参数与变形量的关系
2.2 机械臂的驱动控制
机械臂的驱动分为内部驱动和外部驱动,内部驱动电机调控连续体结构的构型。机械臂固定在外部用于驱动的电滑轨上,控制机械臂的整体运动。图5a展示机械臂系统各部分的组成,基于连续体结构的机械臂的构型如图5b和5c所示。

图5 机械臂系统图
机械臂的控制采用电机进行,选择Arduino Mega2560作为开源主板,适合于管脚较多的DIY项目中,采用ramps接口板作为扩展板,提供了电机驱动,可满足机械臂多自由度的电机控制。Mega2560 和 ramps单板相接,有电机驱动且整体高度较高,对结构设计有要求。MKS GEN主板相当于把Mega2560和ramps单板整合在一起,但价格比较高。MKS GEN_L主板相对于MKS GEN降低了成本,整体布局优化,尺寸也更小。综合考虑,选择MKS GEN_L主板作为机械臂的控制芯片。烧录marlin固件,发送G代码指令即可控制电机的转动。
3 系统集成
3.1 光纤的选型
完成了驱动模块的设计,解决了系统主要的硬件部分。其他部分都与机械臂相关联,激光模块和内窥镜集成在机械臂中。系统采用红外激光作为激光源,红外光源能量较高,对人体来说也是一种较为安全的光源。激光光纤一端与激光器连接,一端从中空套管中伸出将红外激光能量传输到人体内,直接或间接作用于人体组织上。成像光纤一端与相机相连,另一端与套管口齐平,无须伸出套管外。成像光纤不直接暴露在人体组织中,防止光纤端面受到污染视野不清。
本研究使用的激光光纤外径为0.5 mm,成像光纤外径为0.7 mm。两者集成在内径为2 mm、外径为3 mm的中空套管中,套管使用的是具有一定弹性且不易发生塑性形变的尼龙6材质。在实际手术操作中对内窥镜的分辨率有要求,要求视野越大越好,但在内窥镜较小的尺寸下,过高的视场角将导致较大的畸变,所以在选取内窥镜时需要平衡视野与镜头畸变。考虑以上因素,本系统选取的成像光纤显示分辨率为32000像素,视场角为50°,景深>5 mm。激光光纤和成像光纤在套管中需要有一定的约束,将光纤在套管中的位置固定,避免光纤在套管中位置不固定导致的视野不稳定。在套管中增加带有相应孔隙的小圆片,圆片固定在套管口,将光纤分别穿入对应的孔隙,可以使两个光纤固定。
3.2 触觉反馈设备的选型
触觉反馈设备的选型需要考虑机械臂系统的自由度和力反馈的维度。为了完成与连续体机器人的联动,需要考虑二次开发的难度,选择具有配备齐全的开源工具包的硬件设备,降低开发难度。选取了Geomagic Touch(原Sensable PhantomOmni)操作手,它是业界最广泛配置的专业力反馈装置。该设备具有六个自由度的位置感知和三个自由度的力反馈,并提供OpenHaptics工具包,可编写基于力反馈触觉设备的应用程序,达到二次开发的目的。使用C++作为主要编程语言,可调用所需API编写基于力反馈触觉设备的应用程序,进行二次开发。
4 结果
4.1 机器人的工作空间
通过驱动图5中的内部驱动电机测试出连续体结构各个方向最大的弯曲角度,可以测得连续体结构具有较大的变形能力,弯曲角度约90°。根据弯曲角度结合机器人的尺寸在matlab中简化相应的连续体结构模型,绘制出连续体结构的工作空间。由于内部驱动电机和连续体结构都为轴对称结构,所以通过图6中绘制出的机器人的工作空间中心截面图可以反映出机器人的工作空间。
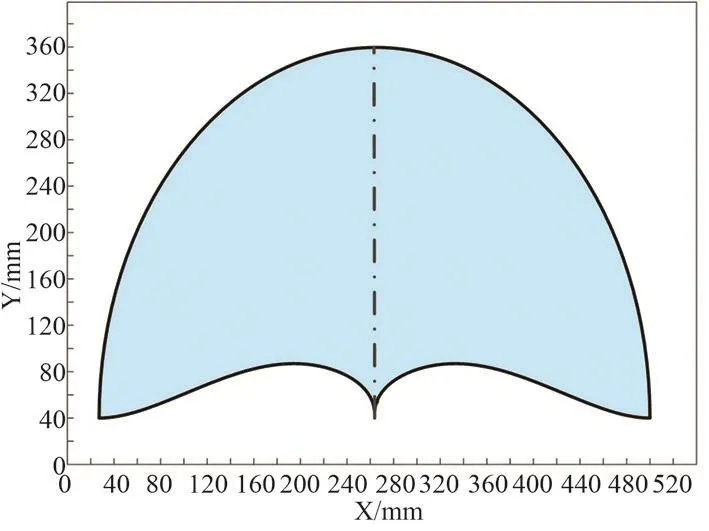
图6 机器人工作空间中心截面图
4.2 机器人的运动路径
针对本研究中所提出的连续体驱动系统,为了验证系统是否可以按照所规划的路径进行运动,对系统进行了测试。根据内部驱动电机的特性预设出正方形、长方形、平行四边形、“V”形四种路径,观察系统是否能按照预设的路径完成运动。图7中红色虚线部分代表预设的路径,蓝色实线表示实际运动路径,由图7可以看出系统基本可以完成所规划的封闭路径和不封闭的路径。
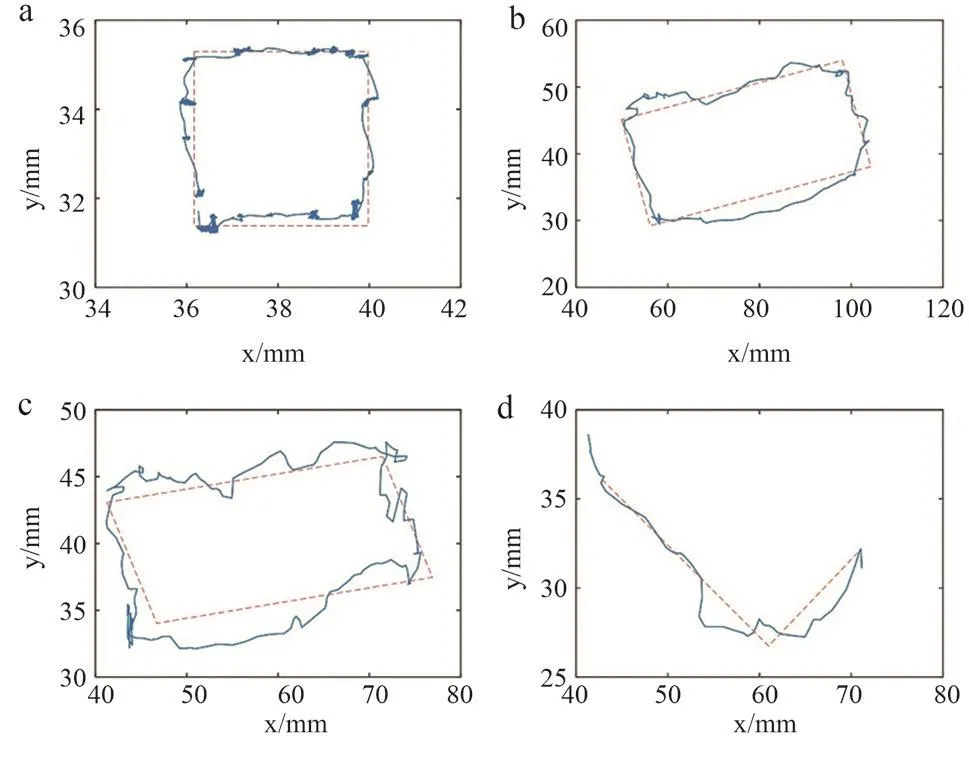
图7 机器人运动路径图
5 讨论
利用手术器械直接到达病灶处诊断和治疗是非常必要的[25],但是因为手术器械本身的设计结构就较为复杂,功能也常常局限于复杂的机械结构和较大的规模,导致疾病很难采用直接检测的方法来进行诊断和治疗。由于复杂和受限非结构化环境的手术需求,小型的连续体机器人优势更加明显。传统的肌腱机器人往往难以达到毫米或者亚毫米级别[22,26]。例如依靠肌腱拉动牵引多根肌腱线和一根中央骨干线驱动的连续型机器人,为了避免接头和滑轮的出现,这些机器人的制造更加偏向于在执行器中嵌入柔性元件以丰富执行器的功能,提高自由度[27-28]。但是,这种制造过程的复杂性就决定了这类机器人难以做到微型化[29-32]。
本研究设计的这款基于连续体结构的软机器人驱动系统适用于经自然腔道,深入人体中难以到达的部位进行操作,解决间接检测的不准确性。在目前研究的基础上,相较于传统的肌腱机器人,缩小了连续体结构的尺寸;相较于基于气动或者液压驱动的机器人,简化了连续体结构所需的驱动装置。驱动系统高度集成了光纤,后续还可以与各种微型的手术缝合针、手术钳等结合,解决更全面的手术问题。
但是本研究在连续体结构的设计上还有待进一步的优化,需要解决连续体结构运动时存在的抖动问题,考虑可能是牵引丝的牵引力不稳定导致。所以之后需要进一步的解决牵引丝对连续体结构的空间位置和姿态的影响以及连续体结构的动力学问题。
6 结论
本文主要是针对人体内难以到达的弯曲、复杂、狭窄的空间设计了一款小型连续体软机器人驱动系统,采用了一款具有中空套管的线控连续体结构,套管为结构中必不可少的一部分,既是连续体结构的主干,同时为系统集成预留了空间,因此对实现系统结构的紧凑性做出了重大贡献。
