基于头部姿态控制的农田监测无人机云台设计与实现*
2022-06-27周利杰孙迎建蔡国庆郝瑞林刘辉
周利杰,孙迎建,蔡国庆,郝瑞林,刘辉
(1. 河北水利电力学院机械工程系,河北沧州,061001;2. 河北省工业机械手控制与可靠性技术创新中心,河北沧州,061001)
0 引言
农田监测能够及时发现作物病虫害、倒伏、干旱、施肥不足、火情等情况,是提高农田产量和防控农田风险的重要措施。农田监测主要依靠无人机[1]、机器人[2]、固定位置传感器[3]等方式开展。无人机监测具有航程远、方便灵活、效率高的优点,是现阶段大型农田应用最多的监测方式。固定翼无人机以其长续航、高抗风能力、大载重、高效率的优点更加适合大型农田的监测任务[4]。无人机监测任务中摄像云台的作用至关重要。云台不仅要支撑摄像机,而且还要满足一定的功能要求。
近年来,众多学者对无人机云台进行了研究,研究方向主要集中在轻量化、减震增稳、姿态跟踪等方面。李创等[5]针对多轴增稳云台轻量化的设计需求,提出了空间多点悬挂和多轴系框架闭环的设计方法,并通过振动试验与仿真分析验证了设计方法的正确性,为云台的轻量化设计提供方法参考。杨润等[6]利用无刷电机、陀螺仪、加速度计等器件设计了机载两轴云台,并通过试验测试了云台系统的稳定性和可行性,为云台的控制系统设计提供了良好借鉴。刘家燕等[7]设计了一种用于载荷内框架安装的橡胶减振器,以保护光电吊舱的内部设备,减小振动对机载光电吊舱成像质量和稳定精度的影响,表明橡胶具有较好的减震效果,为橡胶应用于云台减震提供了技术支撑。王日俊等[8]将互补滤波算法应用于机载云台,互补滤波算法能够对俯仰、滚转和偏航姿态信息进行融合,对保持机载云台在惯性空间中的稳定性有着较为积极的作用,为云台的姿态跟踪和控制提供了方法参考。
综上所述,众多学者对无人机云台在实现轻量化、减震增稳、姿态跟踪等方面取得了较大进展,但这些研究内容主要针对多旋翼无人机的航拍云台,而针对固定翼专用监测云台的研究较少。因此,常将多旋翼航拍云台安装在固定翼上进行农田监测。这种航拍云台具有一定的缺点,如体积大、重量大、迎风阻力大、可集成性差、价格高等,应用于大型农田固定翼监测无人机中仍有一定的局限性。因此,为满足农田监测固定翼无人机对云台的要求,并为农田监测提供支持,研究并设计重量轻、体积小、可集成性高的固定翼监测云台结构和控制系统是非常有必要的。
1 整体方案设计
云台系统主要由姿态采集转发模块和云台组成,使用过程中还需视频眼镜、遥控器、接收机、飞控等设备的配合支持。系统组成如图1所示。工作流程如图2所示。
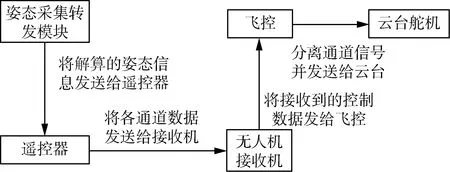
图1 云台系统组成

图2 云台系统工作流程图
姿态采集转发模块固定在操作员头部或者操作员佩戴的视频眼镜外部,实时采集操作员头部的运动姿态。当操作员的头部姿态发生变化的时候,内置的加速度计和陀螺仪采集操作员头部姿态并将数据发送给微处理器。微处理器接收到头部姿态数据后,采用四元数互补滤波算法解析和融合姿态数据,并得到操作员的头部姿态信息。微处理器再将得到的头部姿态信息发送给无人机遥控器,将航向数据在PPM(Pulse Position Modulation脉冲位置调制)信号的第7通道输出,俯仰数据在PPM信号的第8通道输出。遥控器将收到的PPM信号与其他通道的信号进行叠加,再通过遥控器发射机将信号传送给无人机的接收机。接收机将接收到的信号发送给飞控,飞控接收到控制数据后,分离出第7通道数据作为航向控制数据,分离出第8通道数据作为俯仰控制数据,并将航向控制数据和俯仰控制数据传送给云台舵机。云台舵机带动摄像头动作,实现大范围监测视野和头部姿态控制。
2 云台结构设计与仿真分析
固定翼无人机在高速运动和转向过程中,云台需要承受较大载荷和迎风阻力,容易造成云台振动和偏移,轻则造成摄像头画质不稳,重则造成云台结构或者机体损坏[9]。其次,在运动过程中较大的结构质量容易产生云台重心移动,容易诱导振动产生。因此,设计小体积、轻量化、易集成的云台结构是非常有必要的。
2.1 云台结构设计
无人机对机载设备的重量较为敏感,减轻机载设备的重量能够提高无人机的续航、巡航速度和操控性能[10]。云台常用的材料有铝合金、碳纤维、塑料、复合材料、碳钢等[9, 11]。ABS是塑料中广泛应用的材料之一,具有较高的机械强度和冲击强度,同时稳定性和低温性能较好。ABS对比铝合金和碳钢具有密度小的优点,对比碳纤维和复合材料,具有成本低,易加工成型的优点。结合本文设计的云台结构较为紧凑,所承载的摄像头质量较小,ABS材料的强度可以满足云台结构的需求。因此,云台主体结构采用ABS材料。橡胶具有高弹性、低阻抗和高黏弹性,缓冲吸能特性明显,是优良的减振材料,已经广泛应用于无人机云台的减振结构中[12]。因此,本文选用橡胶作为云台的柔性减振材料。ABS和橡胶材料的力学性能如表1所示。

表1 材料的力学性能
本文设计的云台由底板、橡胶块、盖板、航向支架、俯仰支架、摄像头、航向舵机、俯仰舵机、锥齿轮等组成,如图3所示,云台参数如表2所示。

图3 云台结构图

表2 云台参数表
采用低密度的ABS材料作为云台主体结构材料,能够有效减轻云台重量,制作完成的云台包含摄像头总重量约为45 g,而市面上的常用航拍云台重量一般不低于200 g[12]。航向舵机的动力输出通过一级锥齿轮机构传递给航向支架的转轴,不仅能够使云台结构更加紧凑,而且有助于减少云台重量。云台的长宽高为80 mm×40 mm×80 mm,结构小巧紧凑,迎风面积较小,能够减少迎风阻力,并且降低由风阻变化诱发的振动。为减少云台在运动过程中因重心偏移所产生的重力不平衡力矩的影响,将航向舵机和舵机座设计在航向支架转轴的一侧,将俯仰支架和摄像头设计在航向支架转轴的另一侧,并使其重力力矩平衡。云台结构的重心位置对结构的稳定性有重要影响[13],在设计过程中,使用SolidWorks软件中设置云台各个零件的密度、质量和重心等参数,即可计算出云台结构的重心位置坐标,再通过不断调整航向舵机位置和优化俯仰支架结构的方法,使云台结构的重心位置位于航向支架的转轴上。经计算,云台结构的重心位置位于锥齿轮上端面下方约3.4 mm的位置。云台的盖板和底板之间设计有减振橡胶块,橡胶块可以通过自身的形变,吸收振动能量,从而减轻无人机机体传递给云台的振动,提升拍摄画面质量。为了避免振动过大造成减振块脱落,中空减振块内部设计有安全销钉。通过安全销钉限制底板与航向支架的位移量,保障结构安全。
2.2 云台结构仿真分析
为了简化计算,将忽略各处的摩擦,只分析迎风阻力、惯性力和重力对云台的影响。将云台底板4个固定孔的3个方向位移自由度限制为0,模拟云台底板与机体的固定约束。在俯仰支架与摄像头的连接面上施加沿着竖直方向向下的0.06 N作用力,仿真摄像头的重力。考虑无人机在机动时会产生一定的水平惯性力,假设无人机以10 m/s2的水平加速度运动,因此在水平方向设置相应的加速度。考虑无人机在飞行过程中速度较快,云台受到的迎风阻力也不能忽略,根据式(1)[14]可知,在不考虑风速的情况下,无人机相对气流的飞行速度近似等于巡航速度,固定翼巡航速度一般为50~80 km/h,本文取70 km/h,并换算为19.4 m/s;迎风面积近似等于俯仰支架迎风面的面积,计算后约为0.009 m2;阻力系数可根据文献[15]查表取为0.06;经计算可得迎风阻力约为0.13 N,方向沿水平方向;最后定义沿着竖直方向向下的9.8 m/s2的重力加速度。
(1)
式中:ρ——大气密度,ρ=1.293 kg/m3;
v——相对气流的飞行速度,v=19.4 m/s;
S——迎风面积,S=0.009 m2;
C0——阻力系数,C0=0.06。
云台经静力学分析后,应力和形变分析结果云图如图4所示。最大应力发生在航向支架的底部,最大应力为0.5 MPa,远小于ABS材料的屈服极限值。云台的最大变形为0.1 mm,位于航向舵机处,对正常工作产生的不良影响可以忽略。

(a) 应力分析云图
为保证云台的良好工作,有必要进行模态分析,以确定云台结构的固有频率。模态分析结果如表3所示。实际航行过程中,无人机传递给云台的振动频率一般集中于50~70 Hz之间[16-17]。由模态分析结果可知,容易产生共振的频率范围不在云台模态分析的频率范围内。因此,本文设计的云台结构不易产生共振。
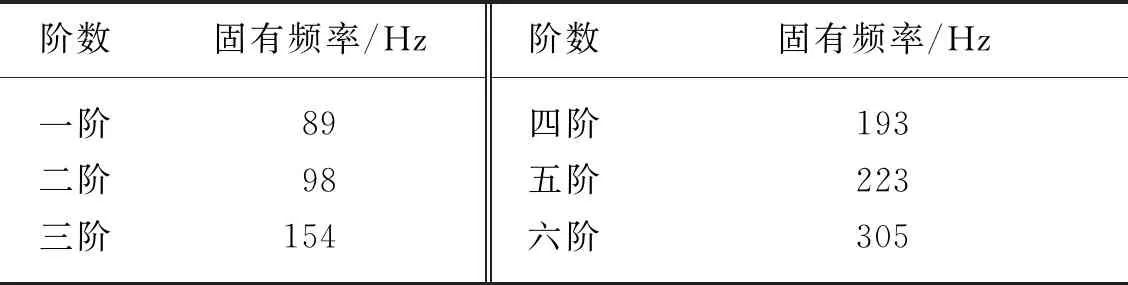
表3 模态分析结果
3 控制系统设计
3.1 硬件设计与实现
微控制器和电源部分电路如图5所示,ADXL345B加速度计和L3G4200陀螺仪部分的电路如图6所示。

图5 微控制器和电源电路图
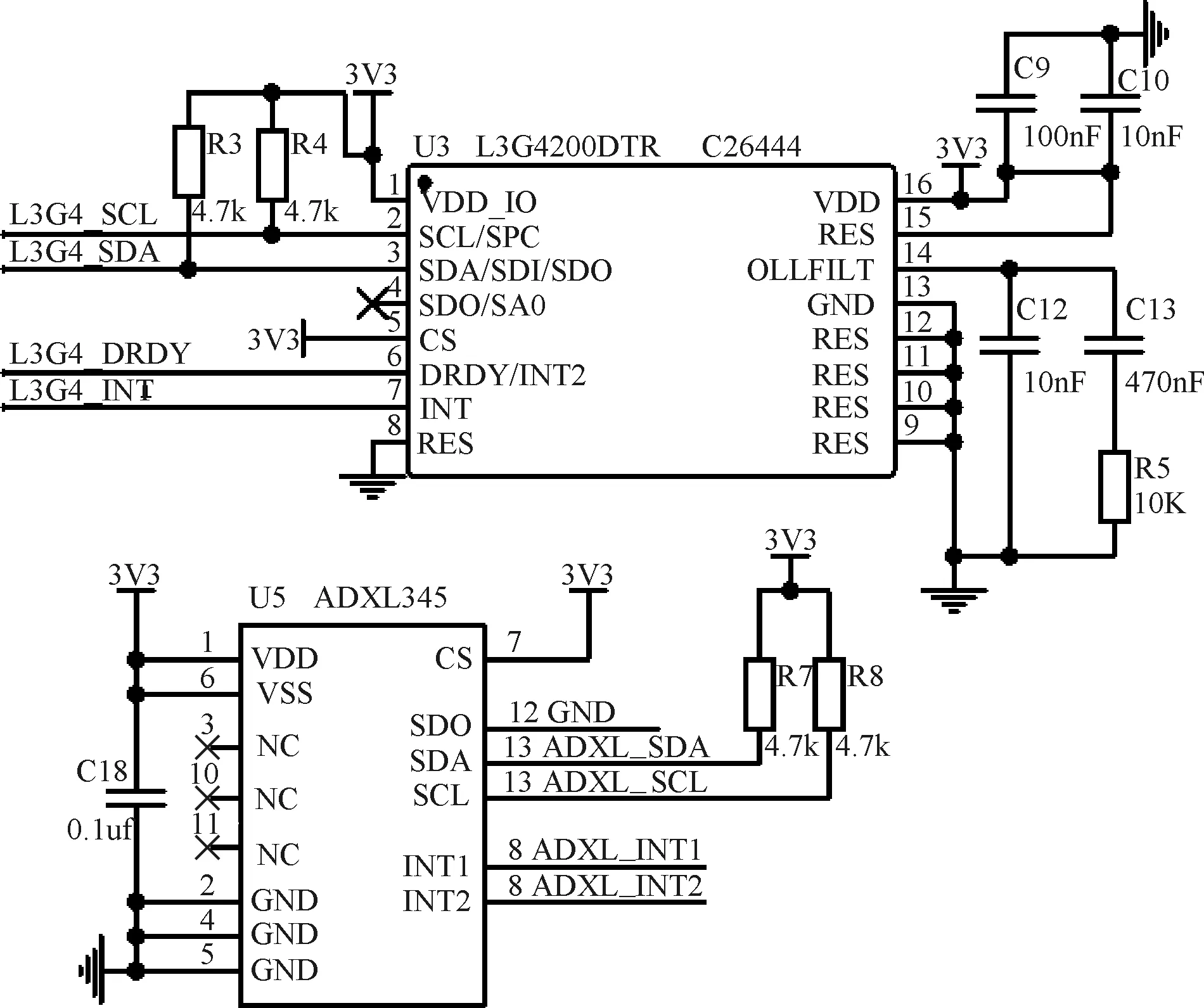
图6 ADXL345B加速度计和L3G4200陀螺仪电路图
头部姿态采集转发模块主要由加速度计、陀螺仪、微控制器、锂电池、回中按键等组成。加速度计选择ADXL345B三轴数字加速度计;陀螺仪采用L3G4200三轴数字陀螺仪;微控制器采用STM32微控制器;模块中设计有姿态回中按钮,可以通过按键强制云台恢复初始姿态。
3.2 姿态解算方法
四元数姿态解算方法相对于欧拉角和方向余弦解算方法有着计算量小、维数低、运算速度快、可以进行全姿态解算的优点[18]。姿态解算过程中,通常采用同时使用多种器件进行数据融合的方法[19]。互补滤波算法[20]比粒子滤波[21]和卡尔曼滤波[22]等算法计算量较小,较适合应用于嵌入式平台中。
姿态解算过程中,定义地理坐标系Oxnynzn和机身坐标系Oxbybzb。地理坐标系的Oxn、Oyn和Ozn分别取正东、正北和天向。机身坐标系Oxb沿着机身纵轴向前,Oyb沿着机身横轴向左,Ozb沿着机身竖轴向上。Oxb、Oyb、Ozb分别对应于机身的横滚、俯仰和航向方向。
根据欧拉定理可知,机身坐标系旋转至地理坐标系的姿态变换矩阵如式(2)所示。

(2)
式中:φ——横滚角;
θ——俯仰角;
ψ——航向角。
三维空间的旋转使用四元数进行表示,由机身坐标系旋转为地理坐标系的四元数姿态矩阵如式(3)所示。

(3)
式中:q1、q2、q3、q4——四元数。
通过四元数的姿态矩阵,可以进一步解出所需的3个欧拉角,如式(4)所示。
(4)
令四元数q=q0+q1i+q2j+q3k,对时间t进行微分运算,可以得到其微分方程如式(5)所示。
(5)
式中:ωx——横滚角速率;
ωy——俯仰角速率;
ωz——航向角速率。
对该微分方程采用一阶龙格库塔法求解,可以得到其迭代公式如式(6)所示。
(6)
通过式(5)~式(6)的不断迭代可以求出当前时刻的四元数,再通过式(2)~式(4),便可得到当前时刻机身坐标系的横滚角、俯仰角和航向角。
工作中,陀螺仪容易产生低频积分漂移累积误差,加速度计容易因振动产生高频噪声干扰。依据陀螺仪和加速度计的输出特性具有互补的特点[23-24],采用互补滤波算法进行数据融合。加速度计和陀螺仪的互补滤波实现原理框图如图7所示,其中Φa表示加速度计的输出数据,Φg表示陀螺仪的输出数据,Φo表示输出的融合数据。
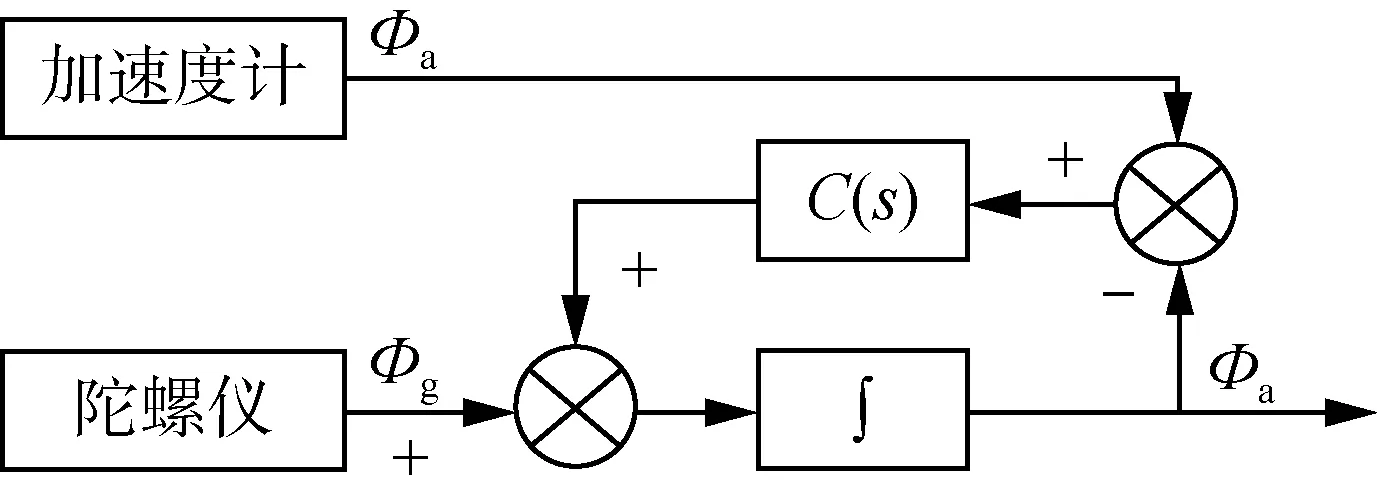
图7 互补滤波算法原理图
互补滤波算法的传递函数框图如图8所示,传递函数如式(7)所示。Kp和Ki为互补滤波系数,范围在0~1之间,本文经过不断的尝试和调整,Kp取0.4,Ki取0.6时能够得到较好的互补滤波结果。
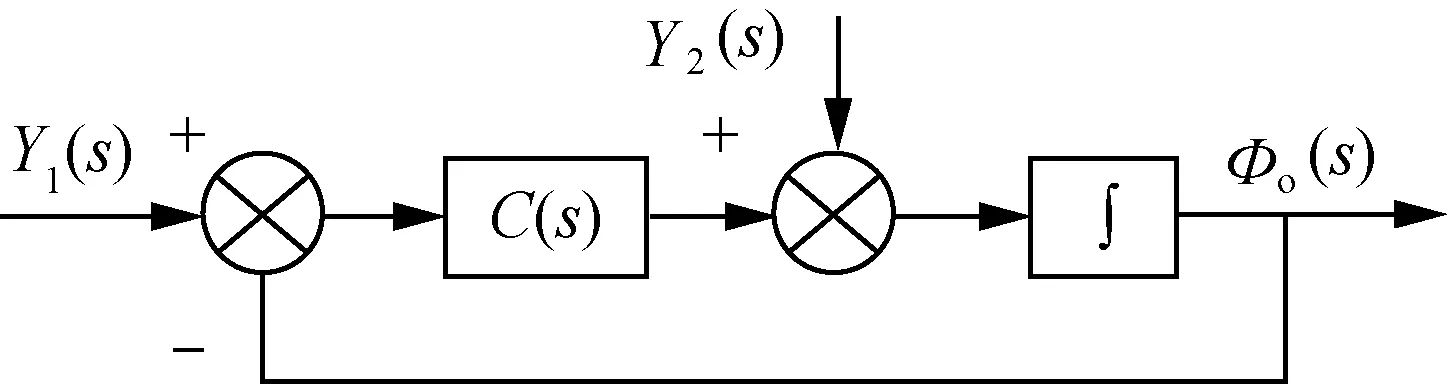
图8 互补滤波算法传递函数框图
(7)
式中:Y1(s)——加速度计的输出数据;
Y2(s)——陀螺仪的输出数据。
将以上述四元数姿态解算和互补滤波融合算法在STM32嵌入式平台进行实现,每100 ms进行一次姿态解算和互补滤波。
4 系统试验测试
4.1 动态测试
为验证云台系统姿态解算的准确度,搭建了测试装置。采用减速步进电机带动姿态采集转发模块匀速转动,减速比为200∶1,减速后的步进角分辨率为0.009°,减速步进电机可以有效地避免步进电机的低速丢步和驱动能力弱的问题。测试过程中实时采集步进电机输出的实际角度和姿态采集转发模块输出的融合后姿态角度,横滚、俯仰和航向姿态角度对比如图9所示。
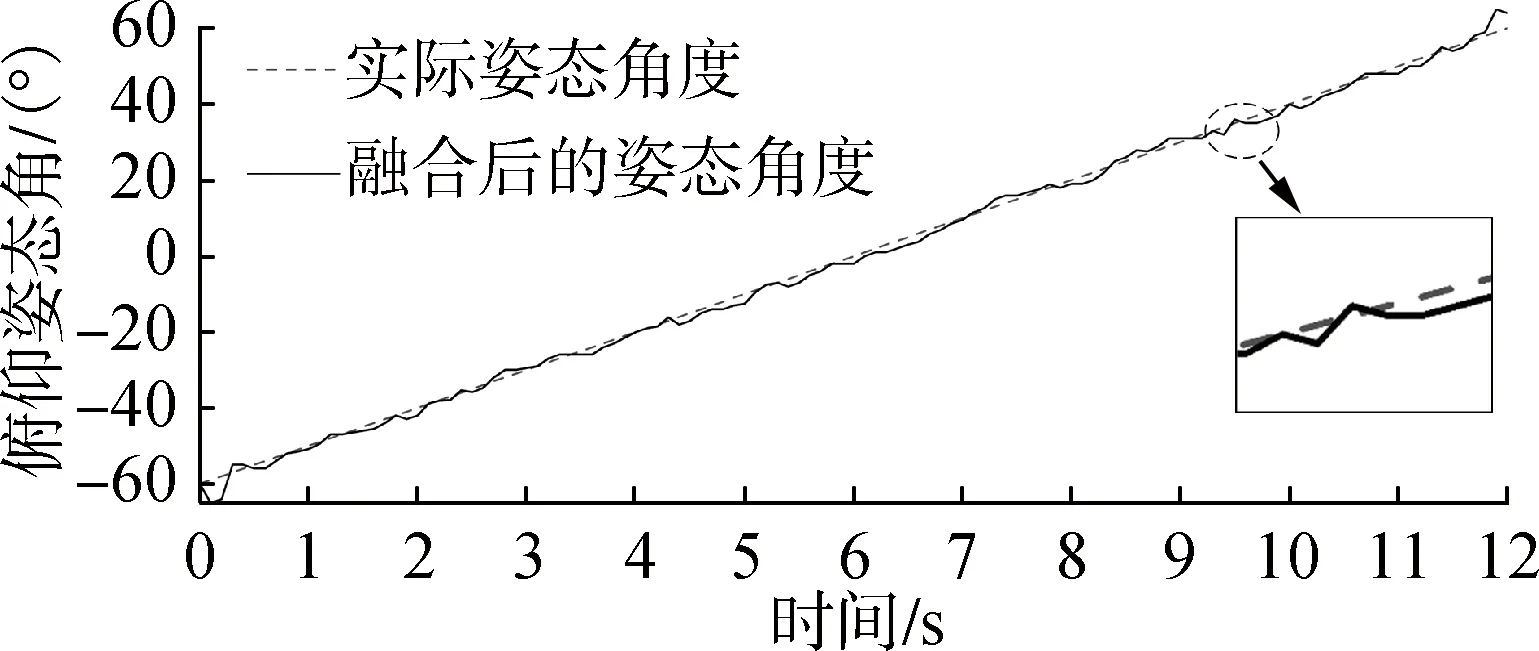
(a) 俯仰姿态角对比
通过测试数据可知,步进电机在开始转动和停止转动的瞬间,由于加速度的突变会引入一些干扰,导致融合后的姿态数据在第0 s和第12 s附近的误差稍大;在步进电机匀速转动过程中,融合后的姿态角度能够较好的对应实际姿态角度,线性度误差不超过2%,角度误差不超过2°。
4.2 静态测试
将姿态采集转发模块静止放置于固定水平台面,进行600 s的静止测试,观测姿态的漂移情况,测试数据如图10所示。由测试结果可知:第600 s的俯仰和横滚姿态角度漂移约为4°;第600 s的航向姿态角度漂移约为5.5°。

(a) 俯仰姿态角
4.3 对比测试与机载测试
为测试云台的减振性能,将本文设计的云台与多旋翼无人机航拍云台进行了对比测试,航拍云台总重量为310 g。搭建的测试设备和使用的测试方法如下:测试过程中,实时采集云台摄像头的振动状态,常用的压电式加速度传感器体积和重量较大,安装在云台摄像头上会影响振动状态,因此,文本采用体积小和重量轻的惯性加速度测量模块MPU6050,并将加速度传感器安装在摄像头上,加速度传感器的x、y、z轴方向分别与机身坐标系Oxb、Oyb、Ozb同向;采用大功率NRF24L01无线传输模块实时传输振动数据,该模块的最大传输距离可达5 km;采用STM32F401微控制器控制NRF24L01无线传输模块和MPU6050加速度传感器,采用频率100 Hz;地面数据接收端采用NRF24L01串口模块,并利用LabView虚拟仪器平台开发数据分析和存储程序;测试过程中为降低其他环境因素的影响,本文设计的云台和航拍云台使用同一载机,两次飞行测试间隔时间不超过20 min,并沿同一直线路径飞行测试;由于航拍云台为下方悬挂方式,本文制作了航拍云台的机载连接板,并对机载连接板进行了结构加强,降低机载连接板对航拍云台的振动影响。测试装置如图11所示。
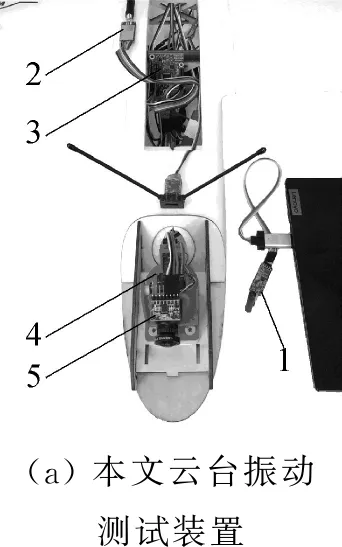
图11 振动测试装置图
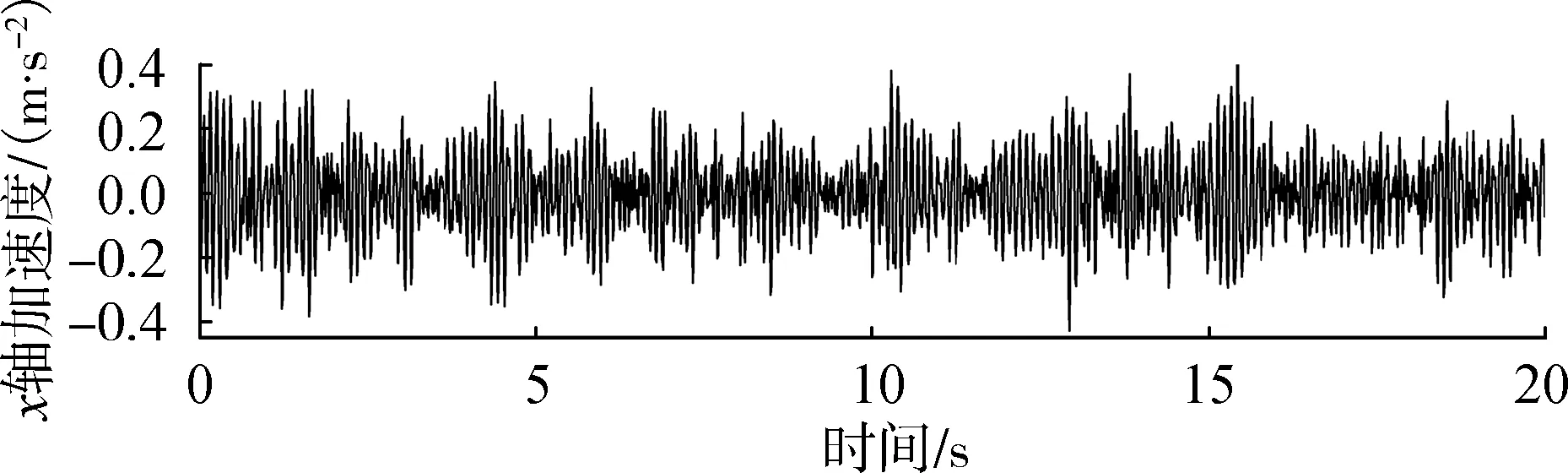
首先进行了匀速平飞对比测试,测试温度约为32 ℃,地面风速2级,无人机保持70 km/h的航速直线飞行,高度保持30 m。本文设计的云台时域测量数据如图12所示,航拍云台的时域测量数据如图13所示。
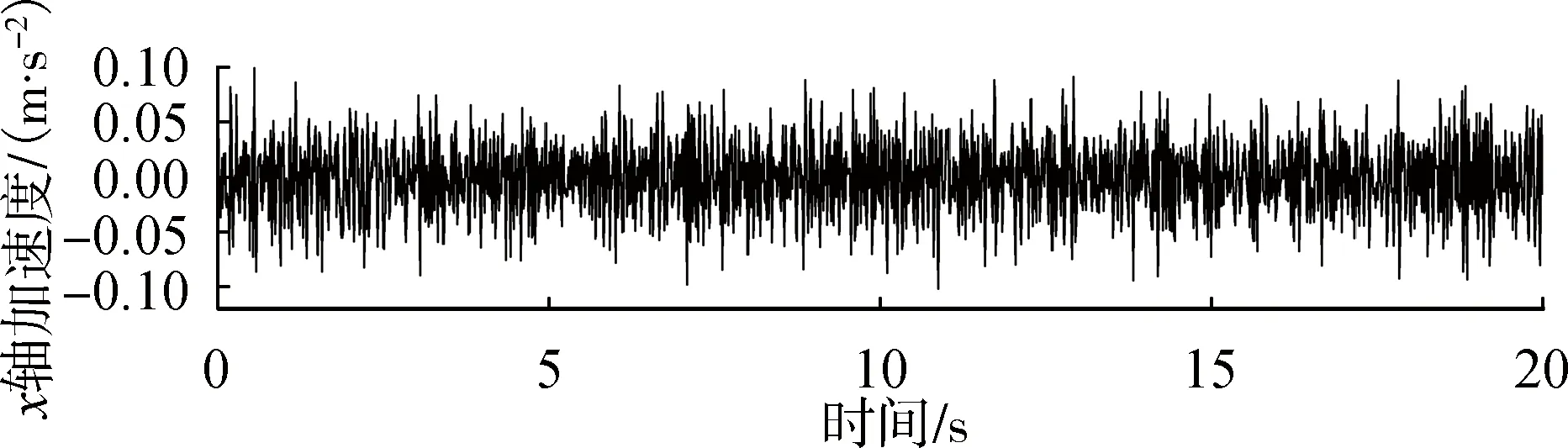
(a) x轴
(a) x轴
通过测量数据可知:时域测量的加速度值在肉眼可见的范围内呈现波动趋势,这主要是由空气动力现象颤振和扰流引起的振动;本文云台和航拍云台z轴的加速度幅值均大于x轴和y轴,这主要是由于固定翼无人机在飞行过程中升力来自主翼和尾翼,低频振动主要是绕主翼横轴的振动,导致安装在机头的云台出现较大的z轴方向的振动。振动加速度的均方根值能在一定程度上代表被测部位振动的激烈程度[25],因此,本文以z轴加速度的均方根值作为振动激烈程度的评价指标。经计算,本文云台的z轴振动加速度均方根值为0.32 m/s2,航拍云台z轴振动加速度均方根值为0.55 m/s2,本文云台的z轴振动加速度均方根值比航拍云台的小41.8%,显示出本文设计的云台比航拍云台具有更好的减振性能。
空气动力现象颤振和扰流引起的振动主要是低频振动[26],振动加速度的频谱图可反映出振动的幅值和频次。将本文云台和航拍云台的z轴振动加速度进行快速傅里叶变换,得到的z轴振动加速度频谱图如图14所示。
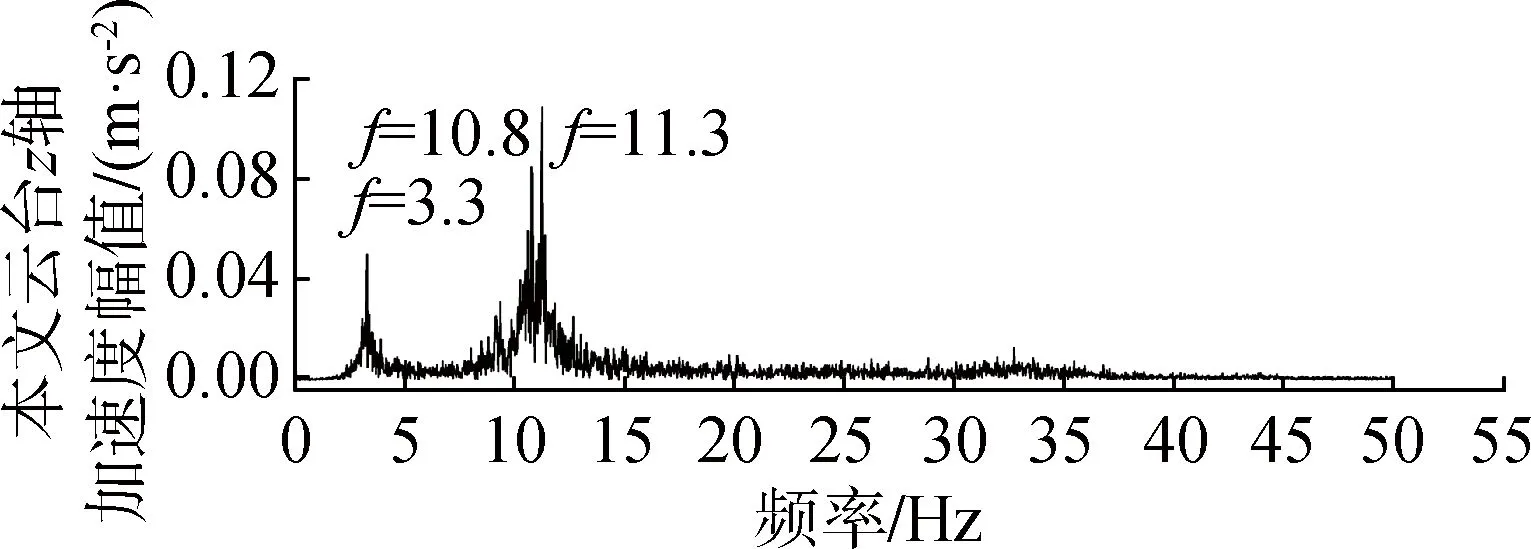
(a) 本文云台
由频谱图可知:本文设计云台的振动主要集中在3.3 Hz、10.8 Hz和11.3 Hz附近,且10.8 Hz和11.3 Hz频率附近的振动幅值较大;航拍云台的振动主要集中在3.0 Hz、9.9 Hz和10.6 Hz附近,且3.0 Hz 附近的频率振动幅值较大;显示出在低频范围内本文设计的云台比航拍云台具有更好地抗振颤和抗扰流性能。
为对比无人机在机动过程中本文云台和航拍云台的减振性能,本文进行机动对比测试。测试过程中将无人机保持平飞姿态,然后将副翼向右打满,随后将副翼向左打满,最后将无人机恢复平飞姿态。测量出云台的z轴振动加速度如图15所示。由测试结果可知:本文设计的云台z轴振动加速度最大幅值为7.28 m/s2,航拍云台的z轴振动加速度最大幅值为9.23 m/s2,本文设计的云台z轴振动加速度最大幅值比航拍云台小21%。这主要由于航拍云台的重量和惯性更大,无人机姿态变化后,航拍云台的橡胶减振块受到的力较大,形变较大,当橡胶减振块的形变达到最大值时,航拍云台的限位结构开始刚性接触,从而产生较大的振动加速度。同时显示出本文设计的云台在机动过程中具有更好的减振和抗振性能。

(a) 本文云台
本文将制作完成的监测云台进行装机,先在地面进行测试,操作员以正常的速度转动头部,并观测云台的跟随情况。随后将无人机在田间进行飞行测试,以测试云台的工作情况。测试结果表明:云台能实时跟随操作员的头部姿态,动作延时较小;模块的回中按键能够将云台姿态回归初始位置;云台振动较小,回传画面稳定,能够在一定程度上发现农田中存在的洪涝、干旱、倒伏、大面积病虫害等问题,能够满足固定翼无人机远距离农田监测需求。
5 结论
针对农田监测无人机对云台的需求,设计了无人机云台结构和控制系统。(1)对云台结构进行了静力学和模态仿真分析,分析结果表明:云台结构合理,最大变形0.1 mm,最大应力0.5 MPa,并且不易产生共振。(2)对云台控制系统进行了研究,采用操作员头部姿态控制的方式设计了云台控制系统,研究了四元数和互补滤波融合算法应用于姿态解算的问题,并且进行了动态测试、静态测试、对比测试与机载测试,测试结果表明:四元数和补滤波融合算法能够较精确的解算姿态角度,角度误差不超过2°,600 s的姿态角度漂移不超过5.5°;与多旋翼航拍云台相比,本文设计的云台具有更好的减振和抗振性能,平飞测试中振动加速度均方根值比航拍云台的小41.8%,机动测试中振动加速度最大幅值比航拍云台小21%;云台系统工作稳定,能够通过操作员的头部姿态实时控制云台,振动较小,画面清晰。该装置能够满足固定翼无人机监测大型农田的需求,能够提供较好的便利性。
