一种车载无人机巢的机电系统设计*
2022-06-24徐国太张凤涛王向宇魏铭辰李福根
徐国太,张凤涛,王向宇,魏铭辰,李福根
(长春师范大学 工程学院, 吉林 长春 130032)
0 引言
随着科技的发展,无人机的功能变得多样化。在日常的使用及运输过程中,无人机内部许多细小零件容易发生损坏。由于对无人机零件材料的要求很高,维修成本很大,因此需要一个保护无人机的装置——无人机巢。该装置既能避免无人机在非工作环境下受到损伤,又能对无人机进行飞行数据的传输,并且还能对无人机进行智能充电,使得无人机能够持续性工作,保证无人机的续航能力。因此,本文以车载无人机巢为研究对象,设计了一种车载无人机巢机电系统。
1 车载无人机巢设计方案
本文所研究的车载无人机巢,适合安装在HAVAL-H6型汽车的行李架上。其整体设计方案如图1所示,它主要由传动装置、停机坪、感应装置、控制装置、驱动机构、机巢腔体等一系列组件组成。操作者可以通过手机APP来控制车载无人机巢执行相关命令,例如无人机的放飞与回收等操作,实现无人机巢的自动化、智能化。

图1 车载无人机巢整体设计方案
该车载无人机巢外观如图2所示,主要用于收纳GT5型无人机,能够实现GT5型无人机在停机坪上手动起飞、自动降落的功能。当需要将无人机从无人机巢中取出时,有两种可用方法,一种是手动控制,一种是遥控控制。手动时操作者用手动方式打开舱盖,拉出停机坪,从而取出无人机。遥控控制时可利用手机的APP通过蓝牙连接,点击打开舱盖,伸出停机坪,取出无人机。无人机因受电池寿命影响,不能长久工作,需要人工更换电池,极大地降低了其工作效率[1]。但车载无人机巢可以通过车上的供电系统为无人机巢提供电能,同时给无人机电池进行充电,提高了工作效率。同时手机APP也能实时监控无人机的各项状态。图3为该无人机巢的关键零部件。
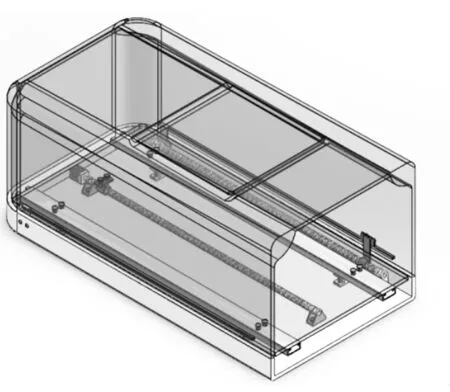
图2 车载无人机巢

图3 无人机巢的关键零部件
2 车载无人机巢工作原理分析
该车载无人机巢的工作过程分为两部分,一为回收过程,二为起飞过程,其整体控制过程如图4所示。

图4 车载无人机巢控制流程图
2.1 无人机回收过程
当无人机飞到回收地点时,无人机巢的电机1、2运作,上盖开始向后移动,同时停机坪也向前移动。然后无人机识别停机坪的方位,根据降落标识无人机停在停机坪上,接着驱使电机使停机坪上的固定装置启动,电机1、2运作,上盖与停机坪同时向相反方向开始滑动闭合,无人机回到无人机巢内。
2.2 无人机起飞过程
无人机巢的控制系统控制无人机巢内部的两个电机工作,使得上盖和停机坪往相反方向运动,从而打开无人机巢。之后停机坪上的固定装置开始运动,向停机坪四周推动,并且给无人机发送准备起飞的信号。无人机起飞后,电机运作,停机坪和上盖收回,停机坪回收至无人机巢中。
3 无人机巢传动系统参数计算
系统中存在两个导轨,舱盖和停机坪均需通过导轨进行平移。由于系统对工作效率有严格要求,包括舱盖打开不得高于30 s,停机坪出舱不得高于10 s,因此需对丝杠导程和电机转速进行计算和选择。
3.1 丝杠导程计算
滚珠丝杠是实现直线和旋转运动相互转换的重要部件,一般由丝杠、螺母、滚珠和回珠器等构成,其传动具有平稳、效率高、精度高、负载能力强和寿命长等特点[2]。根据要求选择滚珠丝杠。
滚珠丝杠导程的计算公式为:
(1)
其中:P为丝杠的单位导程;vmax为停机坪最高移动速度,vmax=0.5 m/s;nmax为电机最高转速,nmax=315 r/min;i为电机与丝杠之间的传动比,i=8(设用一级减速齿轮联接)。
将相关数据代入式(1)计算可得P=12 mm/r。
3.2 电机的选择
舱盖打开的位移一共是1 700 mm,按照要求需在30 s内完全打开。选择带额定负载后输出为n=300 r/min=5 r/s的直流减速电机。此时舱盖打开所需的时间T1为:
(2)
其中:S1为舱盖达到既定位置的位移,S1=1 700 mm;n为滚珠丝杠的转速,n=5 r/s。将相关参数代入式(2)计算可得T1≈28.33 s。
根据系统设置,舱盖打开时间不得超出30 s,可以满足要求。
停机坪移动的位移S2一共为550 mm,按照要求在10 s内移出机舱。若也选择12 mm导程的丝杠、n=300 r/min=5 r/s的直流减速电机,停机坪达到工作位置时所需要的时间T2为:

因此机械传动系统中的两个导轨均选择了直径为20 mm、导程为12 mm的丝杠,丝杠与直流减速电机通过联轴器直接相连,带载后输出为300 r/min,并在导轨的起点和终点处均设置了限位传感器,为控制电路提供信息反馈。
4 无人机巢控制系统设计
控制系统的任务包括驱动电机1完成机舱的运动、驱动电机2完成停机坪的移动。利用压力传感器判断无人机是否降落在停机坪上, 配合电磁吸盘和电磁锁扣使无人机固定在停机坪上面, 可以防止无人机在充电时意外起飞[3];识别限位传感器判断电机运动的极限位置,识别条形码判断无人机的型号,驱动蓝牙模块接收手机端的控制命令等。
以上任务中,传感器的识别均属于基本的IO输入操作,驱动电磁吸盘和电磁锁扣属于基本的IO输出操作。因此设计的重点在于控制器的选型、电机驱动电路设计、条形码识别及蓝牙模块的接口设计和电源变换电路设计四部分。
4.1 控制器的选型
根据图1计算控制系统所需的端口资源,大约需要16个IO接口,此时可以选择STC89C4051或Arduino Uno等单片机作为控制CPU。这两款单片机均可以提供20个左右的端口资源,鉴于条形码传感器、蓝牙模块需要与单片机进行串口通信,而Arduino Uno自身带有1组异步串行口,且可通过普通IO和定时器产生一对模拟串口,这样可以满足控制系统对串口数量的需求,且在编程方面相对容易实现,存储指令代码的空间相对较大。因此选择Arduino Uno单片机作为系统的控制器。
4.2 电机驱动电路设计
通过对电机的计算可知,系统可选择DC12V、300 r/min的直流减速电机,目前市场上JGY-370、JGY-N20、JGB37-520等型号均可满足需求,根据安装位置、尺寸、负载扭矩等需求,最终选择JGB37-520减速电机,其正常工作时,工作电流小于1 A,工作电压有12 V、24 V可选,根据车载点烟口的电压应选择12 V款。
直流减速电机的控制包括启动、调速、制动三个方面,为保证驱动芯片可提供的电流达到电机正常工作电流的2倍以上,设计该驱动电路时使用了L298N芯片,其工作电压最高可达到46 V、电流可达2 A,具体驱动电路如图5所示。

图5 电机驱动电路
4.3 条形码识别及蓝牙模块的接口设计
条形码传感器模块一般自带控制CPU,可通过9 600的波特率、8位数据位、无校验、1个停止位的异步通信协议接收命令和发送数据,而蓝牙模块也采用相同的帧格式与主控制器通信。在设计这两种传感器接口时,将蓝牙模块接在Arduino Uno的硬串口上,条形码传感器接在软串口上,如图6所示。
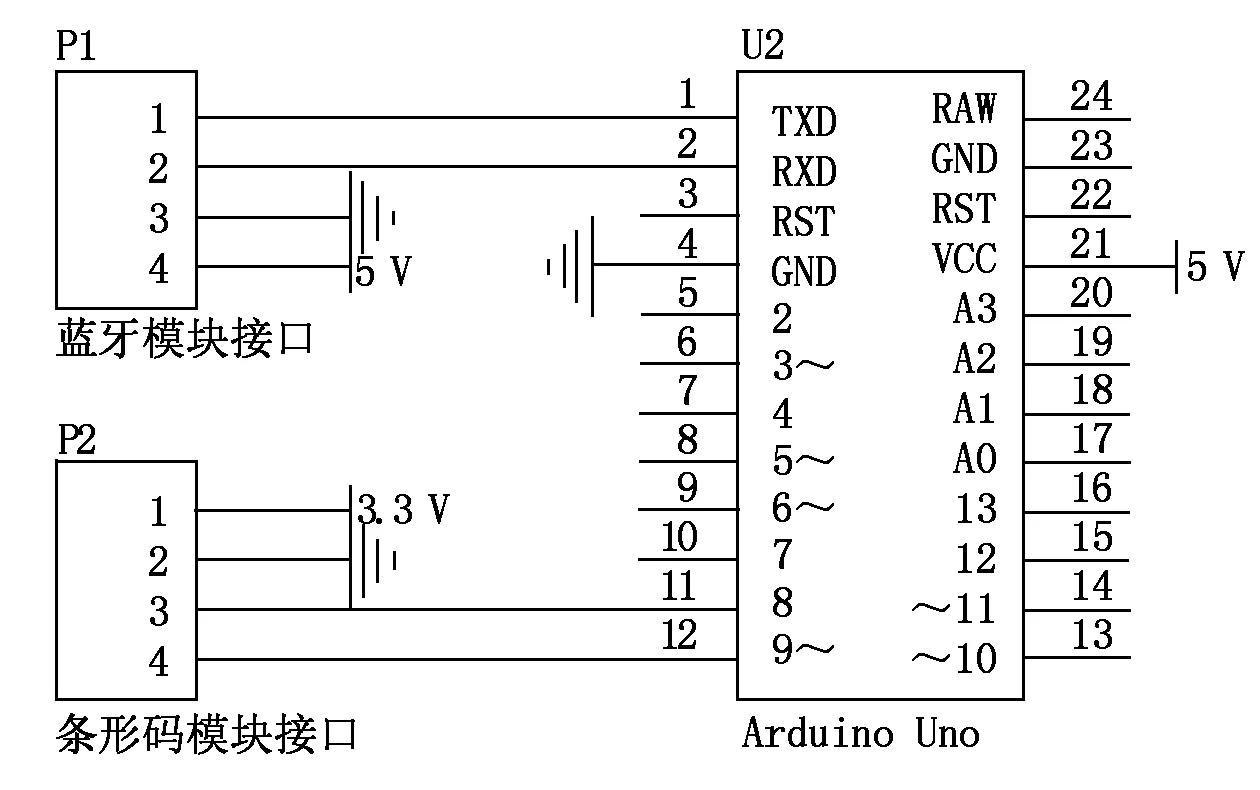
图6 条形码识别及蓝牙接口电路
4.4 电源变换电路
本控制系统电源来自于车载点烟口电压,即DC12 V。电机、L298N芯片、电磁锁扣和电磁吸盘可工作在12 V电压下,单片机、压力传感器、限位传感器、蓝牙模块需要在DC5 V电压下工作,而条形码识别模块需在DC3.3 V电压下工作,综上控制系统共需三种工作电压。按照消耗功率的大小排列,DC12 V需要为电机供电消耗功率最大,DC3.3V仅需给条形码识别模块供电,其消耗的功率最小,因此使用LM2596芯片完成DC12 V到DC5 V的降压变换,使用REG1117芯片完成DC5 V到DC3.3 V的降压变换[4],DC-DC电源变换电路如图7所示。
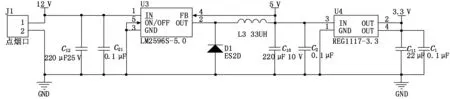
图7 电源变换电路
5 总结
本文所研究的车载无人机巢改变了无人机需人为移动以及操控员控制起飞的复杂过程,设计了一款可以提供无人机的续航能力,给予无人机一定的保护措施,一次性实现无人机启动、起飞、降落、回收于一体的全过程的装置。