辅助老人居家活动的全朝向可升降轮椅
2022-06-24程安颖梁艳梅伍安
程安颖,梁艳梅,伍安
(桂林电子科技大学 机电工程学院,广西桂林,541000)
0 引言
目前中国已成为世界上老年人口最多的国家,截至2020年底中国65岁以上老年人人口已达1.91亿,每年新增65岁以上老年人口平均增长率4%,其中60%-70%需要医疗服务。2021年至2050年是我国人口加速老龄化阶段。老年人口数量平均每年增加620万人,本世纪中叶老年人口数量将达到峰值,到2050年,老年人口总量将超过4亿人,老龄化水平达到30%以上。老龄化的不断加剧势必导致失能老人的增加,医疗需求增加。轮椅作为老年人重要的行动辅助工具,其需求将不断扩大。尽管在大环境的推动下轮椅行业飞速发展,但产品结构及功能单一,难以满足老年人的多种需求。目前市面上较多售卖的是一般只能用来平地行驶代步的普通轮椅,如图1,也有一些电动轮椅能够具有爬楼功能,比如履带式爬楼轮椅、星轮式爬楼轮椅,但是这些轮椅多数需要第二人辅助。许多老人面临独自生活、子女不能随时守候身边的问题,更需要一款仅一人即可方便操作的轮椅。

图 1 普通轮椅

图 3 升降结构
许多老年人居住在小户型的住宅,普通轮椅不便于小空间活动。如今,小户型住宅深受老年人的青睐[1],这个问题将更加突出,一款能够在小空间全向转动的轮椅就被迫切需要了。在生活习惯上,老年人有一些共性。比如:老年人不喜欢站着或蹲着换鞋,因为老年人的腿力和平衡能力都有所下降,站着和蹲着换鞋不仅不方便而且危险;老年人起身时使不上力,需要扶撑[2]。可升降的轮椅能够配合老年人的外形,老年人使用轮椅时,可以将椅面高调整到符合自己需求的高度,解决了老年人穿鞋时找不到合适高度的凳子或是起身时找不到何时高度的支撑等问题。我们设计的全朝向可升降轮椅具有360°朝向、可升降的功能,能够满足多数老年人的生活需求。
1 轮椅的工作原理
全朝向可升降轮椅主要由动力轮驱动前进、转盘机构转动、剪叉式机构升降组成。轮椅前置一个万向轮,后置两个动力轮,由动力轮驱动前进后退,电机在接收到调节速度的命令之后,改变转速,调整行进速度或是进行差速调向。动力驱动轮能保证轮椅缓慢、安全平稳前进或调向。坐垫下设计有蜗轮蜗杆转盘机构和剪叉式升降机构。在小空间的使用场景中,想要改变轮椅朝向,按下朝向调节按键,蜗轮蜗杆转盘机构开始运作,带动椅面转动至所需角度。当要进行高度调节时,按下相应按键,电机转动带动蜗杆,两边交叉机构高度改变,带动椅面调节高度。
该装置主要由电动式齿轮传动机构,齿轮和蜗杆组合的转盘机构,剪叉式升降机构,双蜗杆辅助起立机构组成。全朝向可升降轮椅由电机驱动两个后轮,通过左驱动轮和右驱动轮的不同转速,可调节转向;齿轮和蜗杆组合的转盘机构,电机转轴连接小齿轮,小齿轮通过链条与蜗杆配合,蜗杆与大齿轮啮合,电机转动一定的圈数,可使转盘转动一定的角度;剪叉式升降机构结构简单、承载量大,左右两边分别一个交叉机构,中间采用一根蜗杆作为传动路径,左右两边交叉杆各连接有一滑块,一端杆固定,电机转动带动蜗杆,两边交叉机构升高,达到平稳升降的目的;辅助起立机构采用双蜗杆式,蜗杆在扶手下方,蜗杆传动时,扶手下方的滑道被蜗杆上的杆件支起,扶手平稳缓慢升高,达到辅助起立的目的。
2 机械结构
■ 2.1 实现全朝向的转盘机构
全朝向功能由蜗轮和蜗杆配合的转盘机构实现,电机转轴连接齿轮,齿轮通过链条与蜗杆配合,蜗杆与蜗轮啮合,电机转动一定的圈数,可使转盘转动一定的角度。
蜗杆通常用碳钢或合金钢制成,对于不太重要的传动以及低速中载蜗杆,可采用40钢和45钢等,经调质硬度在220~300HBS。综合考虑,在本机构中蜗杆拟定采用45碳钢调质处理,硬度在220-250HBS。为避免齿轮疲劳强度不足而失效的情况,需保证齿根弯曲疲劳强度,按齿根弯曲疲劳强度进行校核。
相较于棘轮机构和直接由电机控制的转盘机构,由链条驱动、蜗轮蜗杆配合构成的转盘机构能够实现360°任意角度转动,并且更加平稳、缓慢,适合给老人使用。
根据GB5703-85《人体测量方法》中的研究,人在28~30岁时身高达到最大值,35~40岁逐渐出现衰减趋势。根据老年人身高的降低率,杨楠在《老年多功能电动轮椅的人性化设计研究》中近似推算出的中国老年人身体部分测量尺寸如表1所示[3]。
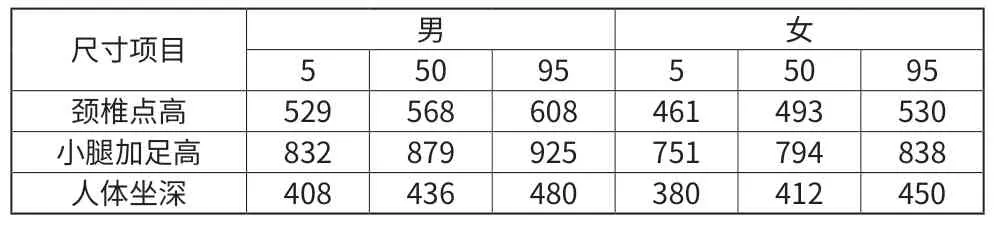
表 1 中国老年人(60岁以上)身体测量部分尺寸(单位:mm)
基于以上数据,轮椅椅面宽度设计为470mm,长度设计为430mm,椅背高度设计为 580mm[4],底部转盘直径约为350mm,大齿轮齿数为60。轮椅转向占地面积为底部框架面积,是轮椅座椅面积的1.5倍,普通轮椅转向面积为轮椅面积的2倍甚至更大。
这一设计主要针对轮椅整体不便转向的问题,适用于在厨房、电梯、卫生间转向空间小的情况。
■ 2.2 剪叉式升降机构
目前国内带有升降功能的轮椅比较少,一般选择的升降方式是在座椅底下安装一个电缸来实现座椅的上升和下降,但由于腿杆的作用面积比较小,当人的重心偏移过大时,轮椅容易倾翻,因此安全性不高。所以我们选择了采用剪叉式升降方式。
剪叉式升降平台是一种能够实现平面升降的机械,主要用于抬升重物,有结构简单、价格便宜、移动灵活、坚实耐用、环境适用性好、便于制造、便于维修等特点。四根长度相等的支撑杆在两杆的中点分别交叉铰接,一边两杆各有一端铰接在平板和机架上,另一边的两杆一端与两滑块相连,并且可以在平板的导轨上定向滑动。我们采用这种剪叉式升降机构的结构比较简单,其承载量大,左右两边各设置一个交叉机构,中间采用一根蜗杆作为传动路径,通过电机转动带动蜗杆,使两边交叉机构升高,达到平稳升降的目的。
此种设计一是为了解决老人使用轮椅独居时不方便拿放在高处的物品的问题,二是解决不同体型的老人使用轮椅时高度难以匹配的问题。
3 模型仿真
采用德国慧鱼公司的慧鱼模型来搭建模拟实际情况,以验证结构的可行性。
慧鱼创意组合模型的主要部件尺寸精确,且为尼龙材质,不易磨损,保证了反复拆装也不会影响模型结合的精确度;慧鱼构件的工业燕尾槽设计使六面都可拼接,可实现随心所欲的组合和扩充。利用基于工业标准的慧鱼基本构件(机械元件/电气元件/气动元件),辅以控制器和编程软件,运用设计构思和实验分析,可以实现多数技术过程的还原。
图4是利用SolidWorks建模软件建立的慧鱼模型的实体模型图。

图 4 整体结构慧鱼模型图
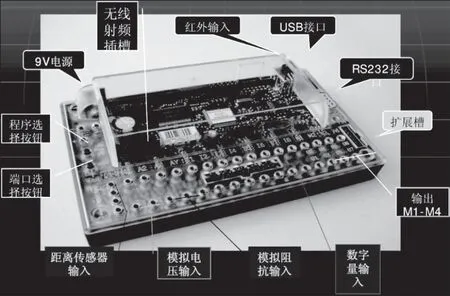
图 5 ROBO接口板图

图 6 系统整体框图
电控部分的主要电路由扬声器电路、MCU、数码管显示模块、红外模块、电机输出电路五大部分组成。其中MCU主控使用ROBO 接口板(型号 93293),该型号有8个输入端口,有4个输出端口,能同时控制4个电机或电磁阀。扬声器用于播报电量不足的情况,提醒使用者及时充电;数码管显示模块用于显示轮椅当前进行的功能和所在的挡位。在程序设计方面,设计有多档调速,适应快慢不同需求;助老轮椅通过轻触遥控器上的按键开关触发控制板程序来控制轮椅行驶、座椅转动任意角度达到想要的朝向位置和调整座椅高度。
电机作为电动轮椅的主要动力提供者,由定子和转子组成,通电导线在磁场中受力运动的方向、电流方向与磁感线方向有关。实现轮椅的全朝向转向及升降功能选用直流伺服电机作为动力源。因为伺服电机的转矩和转速受信号电压控制,所以电机的转速和转动方向随信号电压的大小和相位变化而非常灵敏和准确地跟着变化,使得伺服电机的速度、位置控制精度非常准确,反应迅速,可以实现精准转向。轮椅的行驶功能选用传统且稳定的有刷电机,其优点为变速平稳,几乎感觉不到振动;温升低,可靠性好;价格低。主要选用1:20(用于机械传动)的电动机。
系统控制设计主要为开环控制。开环控制较为简单,由遥控器选择挡位、功能输入系统控制器,控制器处理信息后输出至电机,电机接收到信号开始工作实现对应功能,单向传输信号,无复杂电路反馈,调整方便。
4 结语
我们设计的全朝向可升降轮椅具有360°朝向、可升降的功能,其主要解决的是老人使用轮椅在电梯、卫生间、厨房等在狭小空间活动时遇到的问题。可升降的设计是为了配合老年人的外形,解决日常生活中因高度问题引起的不便情况。我们设计的全朝向可升降轮椅目前处于初期研发阶段,对多功能轮椅的机械结构部分进行了设计和仿真模拟,用慧鱼模型搭建实物模型,以验证设计的可行性,但是由于轮椅实际运行状态涉及多方面因素,对轮椅的各种力学模型有待进一步研究。在不断加剧的老龄化现状面前,医疗科技的设计要更加考虑老年人的使用习惯和需求,为使用者的生理需求和心理依赖做多方面考虑。
