智能龙舟训练教学系统的设计与实现
2022-06-23何华国
何华国
(厦门市教育科学研究院,福建 厦门 361022)
龙舟发源于我国春秋战国时期,最初为汉族在农历五月初五端午节时所进行的水上娱乐活动,是一项集群体协作和个人体能技巧为一体的团队划桨项目,龙舟竞渡盛行于古吴国、古越国、古楚国,后来逐渐演变为全国范围内的传统节日习俗,龙舟运动后来传入日本、越南及欧洲国家,为广大群众所喜爱,并在2010年成为亚运会等国际比赛的正式项目。在长期的演变过程中,龙舟运动不仅成了凝聚人心、群众基础极深的民间传统体育娱乐活动,更成为体现中国悠久文明和丰富文化底蕴的一张名片[1]。
在龙舟的教学与训练过程中,教师无法长期带领一支固定的队伍,学生队员的流动性大,基本两年左右就毕业,在短时间内让学生掌握龙舟的基本动作和技巧并取得好的训练效果非常困难,在龙舟的教学与训练过程中,掌握正确的划桨工作、训练出较强的划桨力度以及在团队中步调一致形成最大合力都是训练的重中之重和关键点。
传统龙舟训练教学中,划桨力度、频率、划距和深度等技术指标由人工记录和监测,需要耗费教师大量时间和精力,无法有效及时记录和反馈,如果有一套系统能够记录并且能够提供反馈就能解决这些问题,通过开发一套能够记录学员在划桨角度、力度、深度、频度、划距以及整船队员整齐度的系统并应用到教学与训练中,为训练提供数据支持,解决教师在训练中无法用肉眼观察到的问题,队员也能够得到及时的反馈,大大提高训练的效率和效果。
针对目前国内学校和体育训练队在龙舟训练教学过程中,较少使用现代化、信息化、智能化教具的现状,根据龙舟训练技术特点,设计开发一套智能化龙舟训练教学系统,采用智能传感器采集划桨运动姿态数据,经过云端服务器分析,将训练数据可视化并实时反馈给训练者或教师,以改进训练方式,及时诊断训练过程的问题,从而实现精细化教学、分层教学,真正做到以学生(训练者)为中心,达到提高训练教学效率和科学训练的目的,提高学生(训练者)竞技水平,更快更好的培养体育人才。
1 系统设计
1.1 系统组成
本文所设计的智能龙舟训练系统整体框图如图1 所示。基于训练需求,需要采用轻量化处理和轻前端处理,船桨部分只有低功耗蓝牙单芯片的CPU部分和用来采集轨迹的传感器单元,以及稳压电路、充电管理和最小化存储单元,在不额外增加过多重量和体积的前提下实时采集船桨的运动轨迹以及力度,采用了在船桨上加装传感器采集运动数据,可以采集单只船桨诸如入水角度、力度、深度、频度、划距等数据,也可以同时采集整条船达20只桨的数据以及动作的协同一致情况,各桨首先将数据通过蓝牙的方式传送至船载智能手机等终端,由手机端以无线传输的方式传送到后台服务器,利用云端服务器强大的算力对数据进行诸如划桨动作正确率分析、单只桨或整船所有船桨数据的记录、可视化处理和前进速度和距离预估,学生手机端或是教师端可以在训练的过程中实时访问云端服务器,以图形化的方式呈现单桨的数据或是整船数据以辅助师生的龙舟训练,也可在训练之后登录云端服务器,以可视化方式回看训练过程数据以调整训练方法和策略。
1.2 硬件电路设计
1.2.1 控制和蓝牙模块
船桨端的核心电路-控制和蓝牙传输模块如图2,选用了DA14580,DA14580是市面应用广泛、性价比较高、功耗较低、体积较小的系统级蓝牙传输芯片,其内部包含了一个32位的ARM公司的cortex M0处理器和RivieraWaves公司的IP核作为BLEcore和基带、射频模块,片内还集成了时钟管理、电源管理、存储管理和其他外围模块控制器,其低功耗的核心是主通过硬件系统的睡眠和唤醒来实现。其低功率架构在无线收发时电流仅消耗3.8mA。

图2 船桨端核心模块电路
1.2.2 动作采集模块
为了采集船桨的入水角度、力度、深度、频度、划距等数据,船桨端使用了MPU9250来采集相关数据,MPU9250内部集成有3轴陀螺仪、3轴加速度计和3轴磁力计, 陀螺仪测量的是旋转的角速度,通过对角速度积分可以得到对应的角度值;加速度计利用船桨运动是产生的惯性来获取当前时刻船桨的加速度分量,根据3轴测量的重力加速度分量,可以得到船桨所在平面与水面的角度关系;磁力计测量的是3个轴的磁感应强度,可作为加速度计的有益补充,在利用加速度计已经获得横滚角和俯仰角后,用磁力计计算出航向角。MPU9250还自带了DMP数字运动处理器硬件加速引擎,可以整合9个轴的传感器数据,利用InvenSense公司提供的MPL运动处理库,方便快捷的实现姿态解算,降低运动处理运算对船桨端处理器的负荷和电力消耗[2],直接向DA14580输出完整的9轴融合演算数据,有效发挥各个模块的优势,实现姿态的精确采集,根据需要采集船桨入水角度、拉桨角度和出桨角度,以及划桨力度、速度和划水的距离等等。
1.2.3 辅助模块
其他模块见图3,包括存储模块,使用了2M位的FLASH存储器W25X20CL,有1 024个可编程页面,64个可擦除扇区,其电流消耗极低。充电电源管理模块使用了TP4057,实现锂电池正负极反接保护以及可编程充电电流。 电源部分使用LP2985进行稳压,其输出电压精度达1%,关断时静态电流仅为1μA,具有过热和过电流保护,可根据使用要求定制电流。这3个模块均只需要较少的外围元件就可以实现便携式应用,特别适合智能船桨的应用场景。

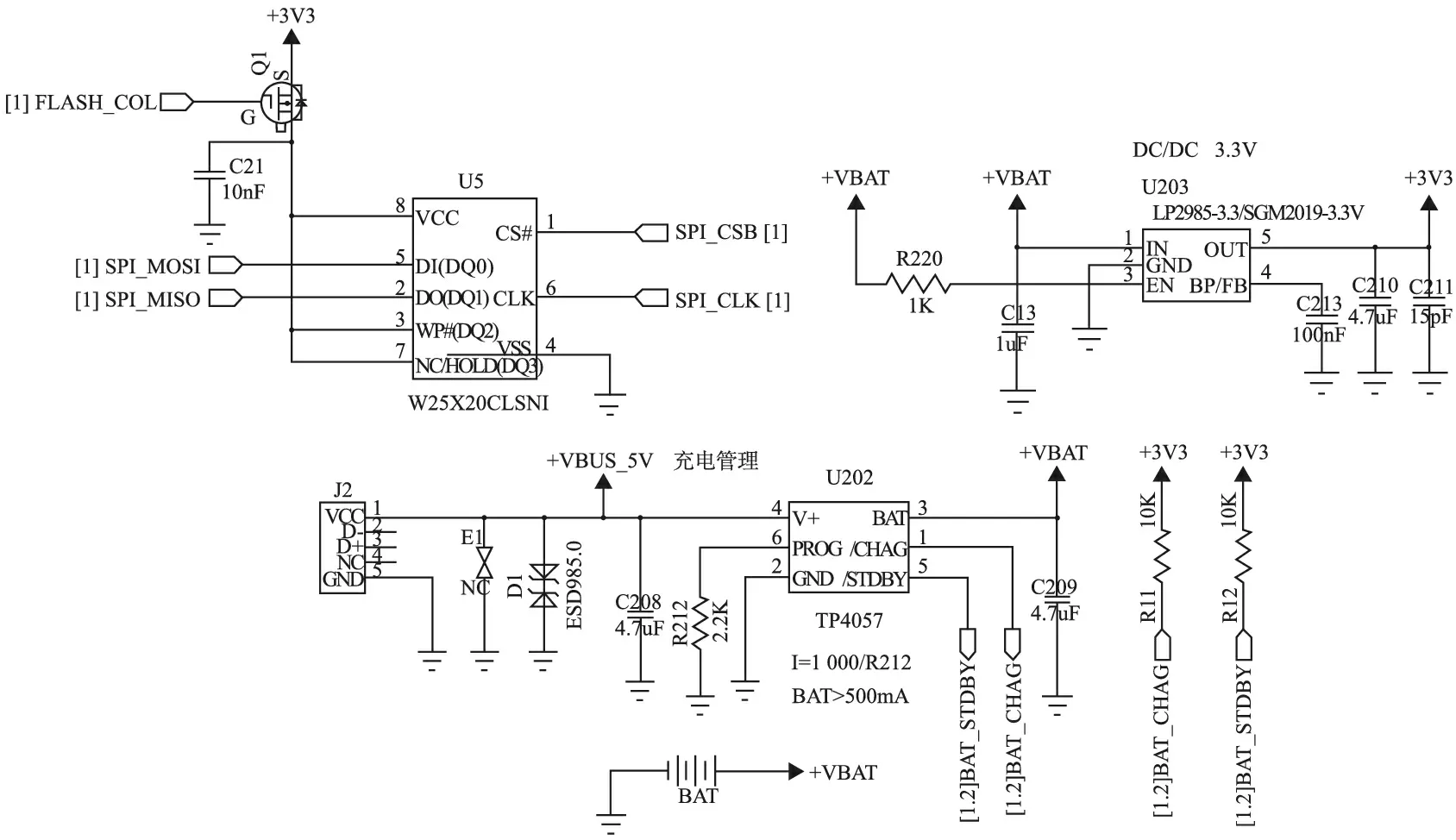
图3 船桨端数据采集模块电路
2 系统软件设计
基于龙舟训练教学的需求,通过MPU9250 采集学员动作,在DA14580的嵌入式软件系统中首先实现对插桨、拉桨、出桨和回桨的识别:有动作用1表示,无动作用0表示;然后在DA14580系统中实现对拉桨动作的力度和轨迹识别,判断是在岸边进行静水训练状态或是在龙舟上进行动水训练,并将识别到的力度和轨迹上发给智能终端上的APP,APP根据力度和轨迹,计算出船桨的插桨深度、拉桨速度、出桨速度和回桨速度,并综合评估出整船船的运动速度;APP除计算外,还承担通信功能,通过4G将数据传送至云端的服务器并存储,训练过程中,学员或教练可随时以可视化的方式查看数据,训练过后更可模拟训练过程、回放历史训练数据以查漏补缺。
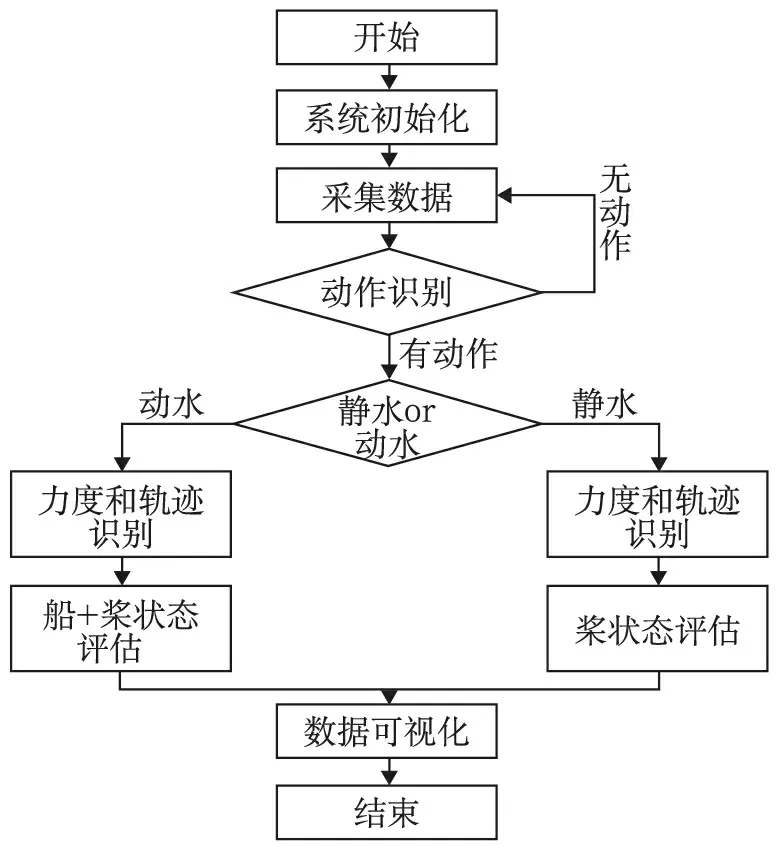
图5 系统软件流程图
2.1 单桨训练质量评价
在龙舟运动中,运动员个人技术技能和素质直接影响了团队最终的成绩,所以非常有必要提高每一个运动员的技术技能水平,身体素质,在训练中及时纠正错误划桨动作,在训练后复盘训练过程,强化身体素质,对运动员成绩提高有非常大的帮助,与传统训练相比,效率大大提高。
评估单桨划桨运动质量的主要参数有划桨角度、力度、深度、频度、划距等,划桨动作分为插桨、拉桨、出桨和回桨4个步骤[3],通过对国际一流龙舟运动员的划桨动作数据采集,设定划桨动作数据的优秀等级,在训练过程中,通过比对受训者数据和标准优秀数据,判定划桨动作的正确率百分比。
插桨、拉桨、出桨和回桨4个连贯动作可理解为绕特定点翻转,如图6所示,可利用MPU9250中的陀螺仪来收集数据和判定运动的方向,MPU9250中的加速度计在常规状态下输出波形变化不大,趋于平坦,有插桨、拉桨和出桨划桨动作时,加速度计输出波形则会发生强烈变化,形成频次较高的波形,故利用加速度信号来判断划桨动作的起始点和终点、插桨深度、划距。由于插桨、拉桨和出桨的速度、力度明显不同,插桨为桨的入水动作,遇到的阻力最小,拉桨为划水动作,桨面与运动方向垂直,遇到的阻力最大,出桨类似插桨的反向动作,但又不完全是反向动作,出桨时为弧形回拉,且桨面旋转为垂直运动方向的最小面积,水的阻力最小,非垂直于水面的拔桨,故遇到的阻力略大于插桨。由于划桨的3个连贯动作特征明显,输出波形明显不同,很容易判定数据归属,综合评估单桨划桨动作的角度、力度、深度、频度、划距等参数,算法相对简单。
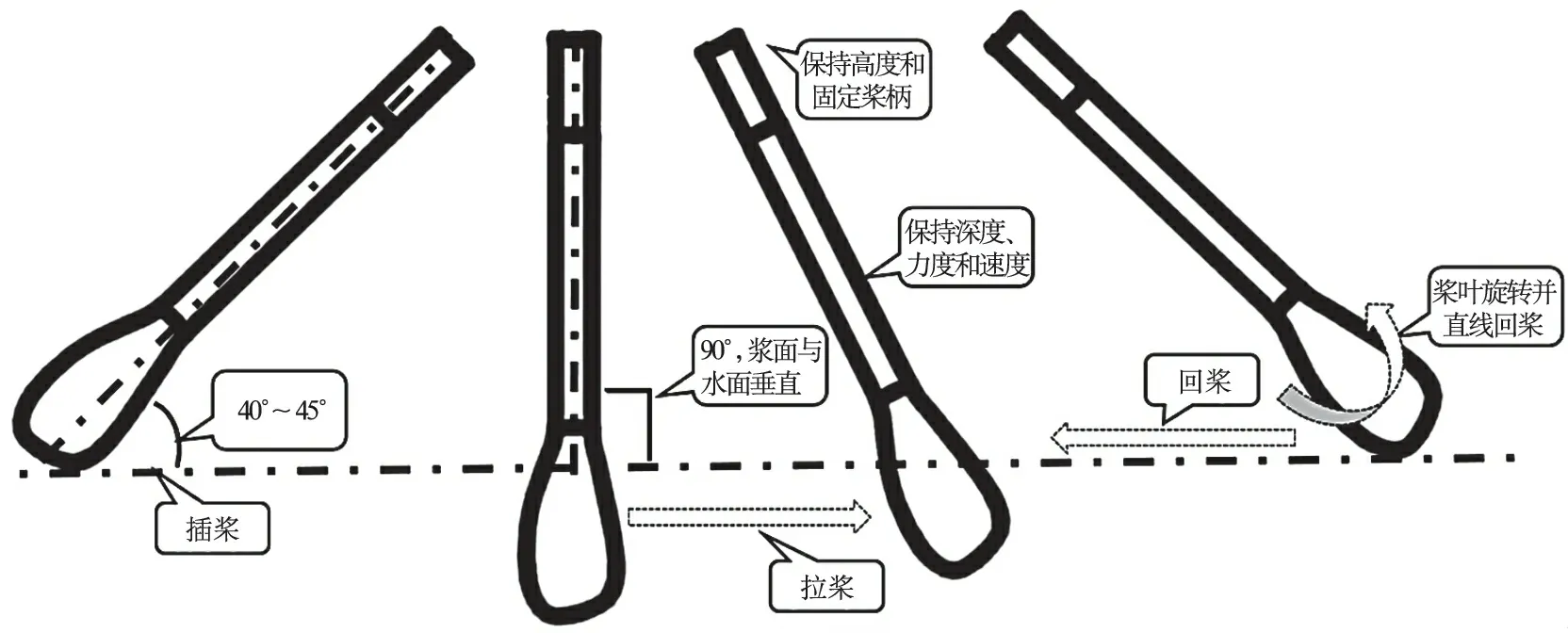
图6 龙舟训练动作示意图
2.2 团队训练质量评价
在龙舟竞技中,团队配合非常重要,没有好的团队协作,单个运动员的技术与技能再出出色,也难以取得好的成绩,必须靠团队成员间亲密无间、心灵相通的配合才能取得的比赛的佳绩。一般来说,龙舟竞技中的配合有鼓手与划手的配合、划手与划手的配合、划手与舵手的配合3种[4],限于篇幅,本训练系统只研究划手与划手之间的团队协作配合。
划手与划手之间的配合要求全体划桨运动员在鼓手敲击鼓声的节奏引导下,在节奏、划距、拉水速度、以及插桨入水的时间上都完全一致,保证全体划桨运动员的划桨过程整齐划一,从预备姿势到插桨、拉桨、出桨、回桨4个环节,所有运动员身体的姿势及桨与水面的角度、插桨时机、拉桨速度、桨出水和回桨都完美同步[3]。船桨端使用了MPU9250来采集相关数据,在DA14580系统中实现对拉桨动作的力度和轨迹识别,将所有参与训练的数据传送至后台进行处理,根据动作同步程度判断全体划手的一致性,还可测算直线运动的距离和龙舟的运动速度(以12人制标准龙舟为例),如图7所示。

图7
3 总 结
本文通过安装在日常训练船桨上的传感器采集训练的数据进行分析判断,有助于实时掌握运动状态和训练水平,让运动更趋科学化,可视化和数据化,寻找在龙舟训练过程中存在的问题,并且通过传感技术手段来采集练习者在龙舟划桨时的运动状态形成数据并进行分析,通过可视化的数据来实时指导教学或反馈训练者本人,并在长期的训练过程中积累数据、形成海量训练数据,事后可以回放数据进行个人分析、团队分析以及训练效果分析,有效提高了龙舟教学与训练的科学性和有效性。智能化的教学辅助手段对教学过程中改造传统教学、提高教学效率起到积极的推动效果,运用智能化、信息化的手段分析运动训练数据,及时改进训练方法,提高训练成绩,推动龙舟运动的发展,正是顺应教育信息化的发展及趋势。
