一种防弯道侧翻的智能移动机器人设计
2022-06-23周明龙程晶晶
周明龙,程晶晶
(安徽机电职业技术学院,安徽 芜湖 241000)
1 引言
智能移动机器人可以通过传感器实现自动移动功能,能够替代人力进行危险或恶劣环境下的作业,不仅能够实现在高辐射高污染环境下的移动,还可以承受人体无法搬运的货物重量,其在工业、农业和服务行业等领域广泛应用[1,2]。
通常智能移动机器人在作为货物搬运使用时,往往会一次性搬运体积和重量较大的货物,而在智能移动机器人行驶进入弯道时,若运载的货物码放位置较高,容易因转弯导致货物重心不稳,使机器人侧翻,造成设备和货物的损坏。目前使用的智能移动机器人无法对较重货物的托载平台进行调控,货物会随机器人弯道行驶时的重心方向倾斜,不利于有效地实现对货物的运输,针对上述问题,急需在原有的智能移动机器人的基础上进行创新设计。
2 防弯道侧翻的智能移动机器人的技术方案
设计的防弯道侧翻的智能移动机器人,可以用来解决弯道侧翻的问题。一种防弯道侧翻的智能移动机器人包括:感应探头,其设置在机器人本体前侧面上,且感应探头和机器人本体之间安装有中控器;中轴杆,其连接在机器人本体之间,中轴杆与车轮之间连接有车轴杆,并且中轴杆之间上设置有主横杆;置物台,其设置在机器人本体顶面上,且置物台两侧底部还连接有承载架和缓冲架。上述结构的设置使装置能够自动监测并感应行驶路径,并在感应到机器人需要进行转弯时,通过中控器实现自动减速,同时能保持装载货物的置物台的水平稳定,进而保持货物摆放位置的稳固,以避免在弯道行驶时货物重心偏移而产生的侧翻[3,4]。
设计的防弯道侧翻的智能移动机器人的中轴杆与机器人本体固定连接,中轴杆与车轴杆呈大倾角夹角状结构,且车轴杆与车轮转动连接,同时车轮呈前宽后窄的结构,此结构能够保持机器人行驶时的平稳。主横杆与中轴杆在同一水平面上处于垂直连接关系,且中轴杆关于机器人本体中心对称的设置有2组,中轴杆中部位置还设置有环形组件,组成转动结构,使机器人的载货支撑结构更加稳固,也便于对货架的调节。环形组件上转动设置有支撑架,支撑架顶部设置升降杆,且升降杆上水平连接着固定杆,此结构设置使固定杆组成的置物支撑结构能免受车轮移动的颠簸影响,并保持置物结构与地面处于水平位置关系。固定杆两侧对称设置感应台,且感应台上还对称设有侧卡槽,侧卡槽与固定杆之间设置弹簧杆,此置物结构能够有效承载较重货物的压力,并缓和对置物架造成的冲击力,能实现对机器人两侧重心的实时监测。弹簧杆与固定杆在侧卡槽内组成弹性结构,弹簧杆在侧卡槽内呈竖直连接结构,且固定杆与置物台通过螺栓组成固定结构,保持置物台的稳定,使机器人的置物台能安全装载重量较重的货物,从而减缓对机器人的磨损以延长使用寿命[5,6]。置物台呈镂空状的长方形结构,且置物台与承载架转动连接,承载架为不锈钢材质,此结构的设置使机器人整体结构轻便稳固,并能便于调节置物台的重心位置。承载架与缓冲架在置物台底部呈交错连接结构,承载架、缓冲架分别与置物台和感应台形成三角形结构,且置物台通过缓冲架与感应台形成弹性结构,上述结构的设置使承载架与缓冲架能稳固支撑和保护置物台两侧,够通过感应台内置的重心感应器控制承载架与置物台连接角度的调整,以保持置物台的水平稳定[7,8]。
3 防弯道侧翻的智能移动机器人实施说明
一种可防止弯道侧翻的智能移动机器人的结构如图1~5所示,图1~5中:1、机器人本体;2、感应探头;3、中控器;4、车轮;5、中轴杆;6、车轴杆;7、主横杆;8、环形组件;9、支撑架;10、升降杆;11、固定杆;12、感应台;13、侧卡槽;14、弹簧杆;15、置物台;16、承载架;17、缓冲架。如图1所示,一种可防止弯道侧翻的智能移动机器人,包括:感应探头2,其设置在机器人本体1前侧面上,且感应探头2和机器人本体1之间安装有中控器3,中轴杆5,其连接在机器人本体1之间,且中轴杆5与车轮4之间连接有车轴杆6,并且中轴杆5之间上设置有主横杆7,置物台15,其设置在机器人本体1顶面上,且置物台15两侧底部还连接有承载架16和缓冲架17[3,9]。
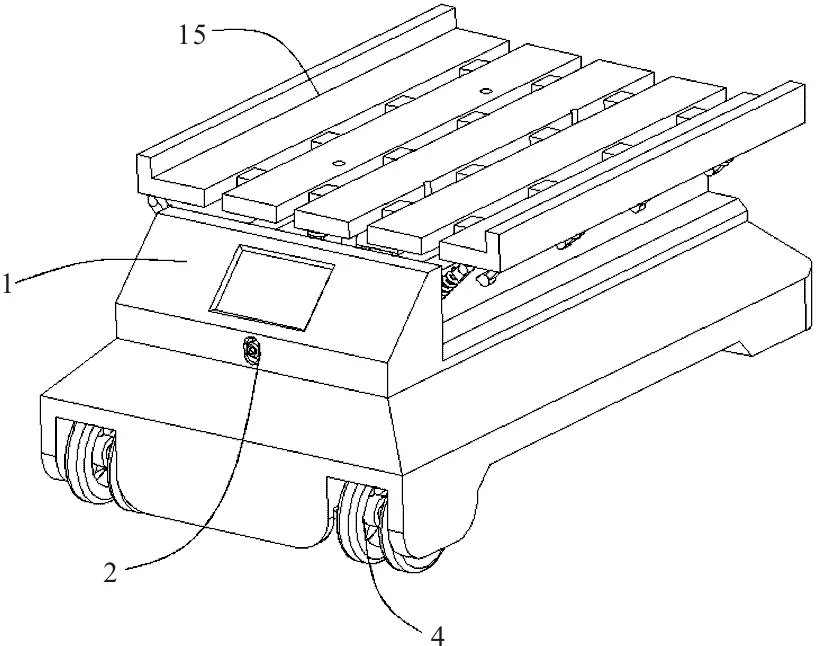
图1 智能移动机器人立体结构示意
如图2所示,在使用该装置时,首先当机器人行驶至转弯处时,机器人本体1正前方的感应探头2监测到路面信息而传递至中控器3,此时机器人通过中轴杆5、车轮4和车轴杆6之间组成的稳定结构保持机器人转弯时支撑整体结构的稳定,而转弯过程中,通过主横杆7稳定连接在机器人上的置物台15受到货物重心偏移的影响,导致置物台15平面歪斜,此时承载架16在置物台15清洗的一侧转动,并压缩另一侧缓冲架17使置物台15保持与地面水平。根据图2和图3所示,弹簧杆14与固定杆11在侧卡槽13内组成弹性结构,且弹簧杆14在侧卡槽13内呈竖直连接结构,并且固定杆11与置物台15通过螺栓组成固定结构,当较重货物摆放在置物台15上时,对置物台15施加的压力会受到弹簧杆14的压缩缓冲,从而减少对机器人的磨损,以便于保持置物台15的稳固;置物台15呈镂空状的长方形结构,且置物台15与承载架16转动连接,并且承载架16为不锈钢材质,当货物摆放在置物台15上时,受到两侧承载架16的支撑而与地面保持水平位置,同时承载架16的不锈钢材质能够保护机器人长期搬运货物的磨损。

图2 智能移动机器人置物台立体结构示意

图3 智能移动机器人车轮立体结构示意
由图2和图3所示,中轴杆5与机器人本体1固定连接,且中轴杆5与车轴杆6呈大倾角夹角状结构,并且车轴杆6与车轮4转动连接,同时车轮4呈前宽后窄的结构,前宽后窄的三轮车轮结构,能够稳固保持装载货物的机器人前部位置的稳定,从而避免机器人侧翻,并能够保持机器人整体框架的稳定;主横杆7与中轴杆5在同一水平面上处于垂直连接关系,且中轴杆5关于机器人本体1中心对称的设置有2组,并且中轴杆5中部位置上还设置有环形组件8,同时中轴杆5与环形组件8组成转动结构,当机器人行驶至路面颠簸路段时,主横杆7与中轴杆5构成的水平框架结构能保持对机器人本体1的稳定支撑,同时环形组件8上连接的车轴杆6能够在中轴杆5上进行转动,从而缓冲地面颠簸的震动。
由图3和图4所示,环形组件8上还转动设置有支撑架9,且支撑架9顶部还设置有升降杆10,并且升降杆10上还水平连接有固定杆11,当路面颠簸时,安装在支撑架9上的升降杆10将固定杆11底部抬升至感应台12上侧并保持一定缓冲间距,而与环形组件8转动连接的支撑架9能保持支架不受车轮4颠簸影响;固定杆11两侧还对称设置有感应台12,且感应台12上还对称开设有侧卡槽13,并且侧卡槽13与固定杆11之间还设置有弹簧杆14,固定杆11两侧安装的感应台12能够实时感应并检测机器人的重心位置,并对固定杆11上连接的置物台15通过侧卡槽13内的弹簧杆14进行缓冲支撑。
由图2和图5所示,承载架16与缓冲架17在置物台15底部呈交错连接结构,且承载架16和缓冲架17分别与置物台15和感应台12构成三角形结构,并且置物台15通过缓冲架17与感应台12构成弹性结构,当机器人行驶至转弯处时,感应台12感应到货物和置物台15重心向一侧偏移后,控制承载架16转动角度推动置物台15返回水平位置,并对置物台15另一侧的缓冲架17进行压缩,从而使置物台15和货物能保持稳定运输。
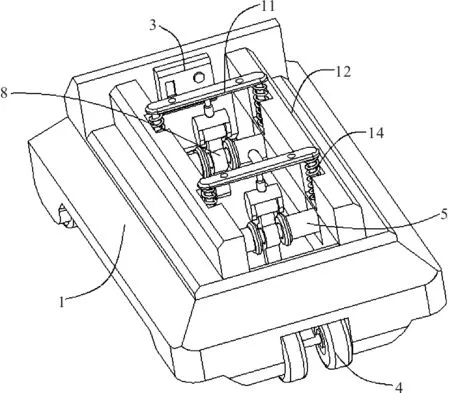
图4 智能移动机器人本体立体结构示意
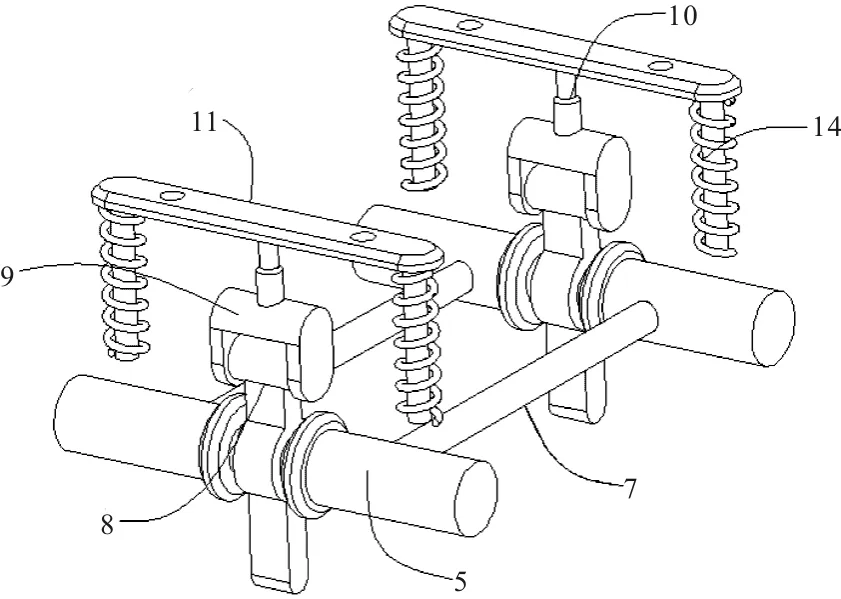
图5 智能移动机器人固定杆立体结构示意
4 防弯道侧翻的智能移动机器人的工作原理
由图1~5所示,使用该智能移动机器人时,首先机器人本体1在行驶至转弯处时,通过感应探头2监测到路面信息而传递至中控器3,由中控器3控制车轮4及机器人本体1减速,而在行驶在路面颠簸的环境中时,安装在支撑架9上的升降杆10自动抬升固定杆11与感应台12上表面产生一定间距,从而有利于两侧侧卡槽13中的弹簧杆14对固定杆11和置物台15进行缓冲支撑,而在转弯时,因受到较重货物以及堆放货物较高的影响,使货物以及机器人重心会向转弯方向内侧偏移,此时感应台12控制置物台15底部两侧的承载架16会自动调整连接角度,并压缩另一侧的缓冲架17对置物台15进行稳定支撑,并推动置物台15返回与地面的水平位置角度,从而避免机器人和货物侧翻,这就是该可防止弯道侧翻的智能移动机器人的工作原理[10,11]。
与现有技术相比,设计的智能移动机器人具有以下特点。
(1)机器人本体上设置感应探头、中控器和车轮的结构,通过机器人本体正前方设置的感应探头对道路环境进行监测,并利用中控器对监测数据进行判断,以及通过前宽后窄的三轮车轮结构实现货物的稳定运输的原理,达到装置能够便于对行驶路径进行实时监测,并在需要拐弯时控制机器人减速,同时能够保持机器人整体运行结构的重心稳固的目的[12,13]。
(2)置物台上设置感应台、弹簧杆、承载架和缓冲架的结构,通过感应台内置的重心感应设备监测置物台的重心偏移方向和角度,并利用弹簧杆对货物给置物台施加的压力进行缓冲,同时利用感应台控制不锈钢承载架转动角度[14,15],以及缓冲架压缩内置弹簧将置物台摆正的原理,实现装置能够便于控制机器人转弯时,上货物重心偏移时调节置物台的水平方向,进而保持载货重心的稳固的功能[16]。
5 结语
本文给出了具体的设计方案以及实施说明,并且阐述了工作原理。通过上述3个方面的分析,可以看出,设计的可防止弯道侧翻的智能移动机器人,主要是通过在机器人本体上设置感应探头、中控器和车轮的结构以及在置物台上设置感应台、弹簧杆、承载架和缓冲架的结构,可以做到在拐弯时控制机器人减速,以及保持机器人整体运行结构的重心稳固。与现有技术相比,设计的一种可防止弯道侧翻的智能移动机器人具有能够保持机器人整体运行结构的重心稳固和载货重心稳固的特点。
