多扩展目标跟踪中基于加权最优子模式分配距离的传感器管理方法
2022-06-21刘雅婷张双庆韩崇昭
陈 辉 ,刘雅婷 ,张双庆 ,韩崇昭
(1.兰州理工大学电气工程与信息工程学院,甘肃兰州 730050;2.西安交通大学综合自动化研究所,陕西西安 710049)
1 引言
随着传感器技术和信息融合技术的快速发展,传感器可以根据不同的任务目的进行工作方式及运行参数的最优配置,这就是传感器管理.传感器管理通常依照某一评价准则对传感器给定参数进行调节[1-3],以达到监控系统整体效用最大化的目的.传感器管理问题通常在部分可观测马尔科夫决策过程(partially observable Markov decision processes,POMDP)理论框架下展开研究[4-5].然而,在复杂的多目标跟踪中,由于在状态空间和量测空间存在多维不确定因素,为传感器管理技术研究增加了难度.
利用多目标滤波器可对复杂环境下的多目标信息进行有效感知.其中,感知可为传感器管理决策提供信息依据,进而获取以优化滤波性能为目的的最佳量测信息[6-7].一般来说,获取最佳量测过程的方法有两种,一种是基于信息论的传感器管理方法,该方法利用多目标的概率分布来建立评价准则.通常使用散度函数(如R´enyi散度)来度量信息量的差异[8-9],将量测空间所选散度函数的统计期望作为评价函数,在信息增益最大化的准则下解决传感器管理问题.虽然,基于信息论的传感器管理方法能够使得系统信息增量最大化,但在复杂的实际环境中容易忽略传感器管理任务的实际需求.而基于任务论的传感器管理方法[10-11]目的性更强,这类方法更加注重跟踪系统的预期目标,以具体任务的需求建立传感器管理的评价准则作为决策最优管理的依据.基于此,本文重点研究基于任务论的传感器管理方法,其任务需求是研究得到多目标后验分布的离差,从而以离差最小化优化多扩展目标含形状信息的状态估计.
传统的多目标跟踪假设目标为点目标,即每个时刻一个目标至多对应一个量测.然而随着现代传感器分辨率不断提高,一个目标可以由多个量测源产生多个量测,该目标被称为扩展目标(extended target,ET),此时的跟踪问题被称为扩展目标跟踪(ET tracking,ETT).而多扩展目标跟踪(multiple ETT,METT)问题是利用各目标的多源量测信息,可基于信息融合技术对多目标特征信息进行更深层次的估计,其已经成为现代目标跟踪系统的热门议题.但是,由于扩展目标每个采样周期对应了多个量测,这进一步加剧了量测关联关系的不确定性和目标的不确定性,使得METT问题的求解愈加困难.值得一提的是,在有限集统计(finite set statistics,FISST)理论框架下[12-14],多目标状态和量测分别被建模为随机有限集(random finite set,RFS)的形式,该方法避免直接应对目标和量测之间复杂的数据关联决策,直接由集值随机变量的贝叶斯递推滤波解决多目标估计问题.鉴于RFS方法的这一便利性,基于RFS多扩展目标跟踪的研究备受关注.Mahler首次提出了概率假设密度(probability hypothesis density,PHD)滤波器[15],并将其由点目标跟踪推广至扩展目标跟踪,实现了扩展目标概率假设密度(ET-PHD)滤波器[16].Granstrom在其基础上给出了ET-PHD滤波算法高斯混合形式,即扩展目标高斯混合概率假设密度(ET Gaussian mixture PHD,ET-GMPHD)滤波器[17].基于RFS的多目标滤波方法极大的推动了多扩展目标跟踪[18-19]的研究.
如何利用由监控系统获得的多源量测信息来估计目标的形状特征是现阶段扩展目标跟踪研究的热点.针对该问题,Koch提出了基于随机矩阵(random matrice model,RMM)模型的多扩展目标跟踪算法[20],该方法利用椭圆基本形状假设描述扩展目标的基本轮廓信息.而椭圆是一种经典的抽象模型,且保留了大小和方向这两个基本特征,能够在杂波环境和量测精度低的情况下有效刻画扩展目标的形状特征,这对于目标特征的有效提取和目标识别具有重要的现实意义.RMM的理论基础是在乘积运算的条件下依据威沙特分布和逆威沙特分布概率密度存在的闭合性质.若将多扩展目标的运动状态建模为高斯分布,进一步将多目标的形状信息利用可描述椭圆信息的服从逆威沙特分布的随机矩阵去建模,其形状的演变建模为威沙特分布,则可通过贝叶斯递推对目标的运动状态和形状进行联合递推估计.随后,在杂波和漏检的情况下,Granstrom等将RMM模型结合扩展目标GMPHD滤波框架,实现了对多目标运动状态和扩展状态的联合跟踪估计,即提出了高斯逆威沙特概率假设密度(Gaussian inverse Wishart-PHD,GIW-PHD)滤波器[21]和高斯逆威沙特势概率假设密度(Gaussian inverse Wishart cardinalized PHD,GIW-CPHD)滤波器[22].此外,Baum等提出了随机超曲面(random hypersurface model,RHM)模型的建模方法[23-24],在杂波较少和量测精度高的条件下,可以直接对不规则形状目标跟踪估计.
在杂波环境且目标量测误差较高的情况下,METT存在形状估计以及质心估计精度低的问题.本文利用传感器管理的方法,通过对传感器参数进行合理配置,以获得最佳量测信息达到对多扩展目标形状和运动状态进行联合跟踪估计优化的目的.然而,现阶段出现的传感器管理方法大多基于点目标提出,本文重点讨论椭圆轮廓多扩展目标跟踪优化中的传感器管理方法.
本文的重点和创新点描述如下:在POMDP理论框架下,基于RFS研究多扩展目标跟踪优化中的传感器管理方法.本文基于任务论以提高多扩展目标状态估计精度为期望设计传感器管理策略,利用加权最优子模式分配(weighted optimal sub-pattern assignment,W-OSPA)距离[25]依据目标的运动状态、扩展状态和量测率综合评价多扩展目标状态估计的质量,并利用W-OSPA距离构造评价函数对多扩展目标后验分布的离差进行量化,通过蒙特卡罗方法推导出离差的具体数值求解方法,并以离差最小化为最优准则进行传感器管理方法的研究.最后,构造多扩展目标跟踪优化的仿真实验,验证所提方法的有效性.
2 系统建模及问题描述
2.1 多扩展目标RFS建模
假设k时刻多扩展目标的状态集合可以表示为
1) 运动状态模型.
k时刻多扩展目标的运动状态模型定义为
2) 量测模型.
k时刻多扩展目标的量测模型定义为
其中Kk表示k时刻传感器接收到杂波构成的集合,并且该杂波过程服从参数为λk的泊松分布.
3) 形态模型.
目标扩展状态的转移密度函数用Wishart分布可以表示为


4) 量测率模型.
假设量测率是随时间近似恒定的,那么

本文假设扩展目标产生的量测个数服从泊松分布,且其均值为服从参数为γk的伽玛分布.量测率通常取决于目标尺寸及其与传感器的距离(即目标的大小和位置),而为这些依赖关系建立一个通用的数学模型是非常困难的.模型(8)简化了这些依赖性,并为后续的分析研究提供了很大的便利.
2.2 多扩展目标跟踪中传感器管理问题提出
多扩展目标跟踪中的传感器管理方法一般是在POMDP理论框架下进行的.首先定义在POMDP理论框架下传感器管理的相关要素:当前的多扩展目标状态信息,一套可实现传感器动作集合以及相应的评价函数.其中,多扩展目标状态信息可用多扩展目标后验分布GGIWk+H(ξk|Z1:k)描述,表示k时刻向后H步的多扩展目标后验分布,Uk表示传感器动作集合,Zk+1:k+H(uH)表示传感器方案uH(uH ∈Uk)所对应的理想量测集(predicted ideal measurement set,PIMS).其次,由于随着H的增加,将会导致计算复杂度加大,为了便于计算,本文选用H=1的管理方案,该方案称为“Myopic”方案[26-27].对于每个传感器动作u都有一个相应的评价函数V(u),若用k表示最优传感器管理序列,则通过以下准则确定该最优序列:

本文以多扩展目标后验分布离差最小化为最优准则,进行传感器参数的控制,评价函数Vk+H(u)可以表示为

3 伽玛高斯逆威沙特-PHD滤波器
3.1 预测过程
GGIW-PHD滤波器预测方程由存活和新生目标两部分组成,其中存在目标的PHD可以表示为
伽玛分布中的形状参数和逆比例参数分别表示为

高斯分布中的均值和协方差分别表示为

逆威沙特分布中的自由度和逆尺度矩阵分别表示为
新生目标的PHD可以表示为

整体的GGIW-PHD 预测方程Dk|k−1(ξk)是由式(11)-(17)构成,总体预测分量表示为

3.2 更新过程
若扩展目标在同一时刻产生量测数目服从泊松分布,传感器将检测到来自多个目标的多个量测.因此在更新多扩展目标概率密度之前需要对量测集进行划分,将来自同一目标的量测划分为一簇.本文采用距离划分方法进行量测集的划分,下面给出多扩展目标概率密度的量测更新过程.
更新后的扩展目标PHD可以表示为
更新后的GGIW分布参数表示为
其中:|V|表示矩阵V的行列式,|W|表示单元W中量测的数目,Γ(·)表示伽玛函数,Γd(·)表示多元伽玛函数.假设|pp|表示第p个划分中单元W的数目,更新后的PHD高斯分量数.
4 基于W-OSPA距离的传感器管理方法
在多目标跟踪领域,设计合适的评价函数以满足滤波的预期性能是制定基于任务论传感器管理方法的核心.多目标状态估计是由更新的后验概率密度计算得到,其精度可由多目标后验分布在其均值周围的离差所表征.而在多目标滤波的场景中,需要一个合适的距离来量化多扩展目标运动状态、扩展(形状)状态和量测率的估计结果,OSPA距离已被推广为度量集合之间距离的理想指标[28-29],而W-OSPA距离相较于OSPA距离是联合考虑多目标的运动状态、扩展状态和量测率来得到多目标的估计误差.以下使用WOSPA距离构造多扩展目标分布后验离差,进行相应传感器管理方法研究.
4.1 OSPA距离函数
4.2 W-OSPA距离函数
多扩展目标的状态不仅包含运动状态还有扩展状态和量测率.因此,本文用一个加权OSPA距离的方法,即W-OSPA距离,对多扩展目标状态估计的效果进行综合评价.假设多扩展目标的真实状态集合和估计状态集合分别表示为,那么它们之间的距离可以表示为
其中:|·|表示绝对值,‖·‖2表示欧几里得范数,‖·‖F表示弗罗贝尼乌斯范数,cγ,cx,cX分别表示量测率、运动状态和扩展状态的截断系数.一个最优分配可以表示为
4.3 传感器管理方案的求解
利用Zk(u)对预测的强度函数Dk+1|k(ξk+1)更新,进而得到传感器管理方案u对应的伪更新强度函数

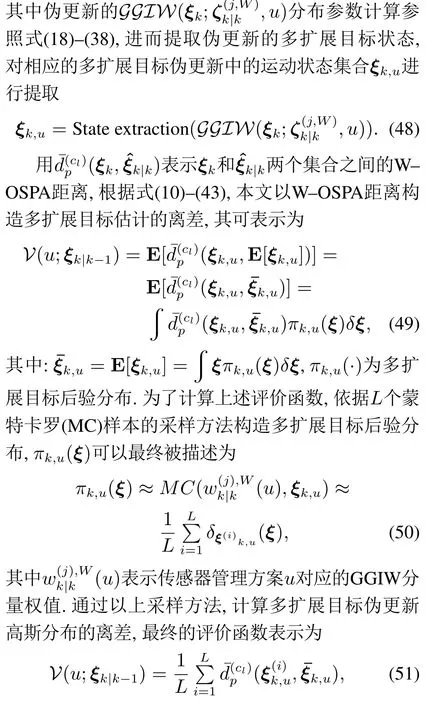
最后,依据式(9)确定最优的传感器管理方案.
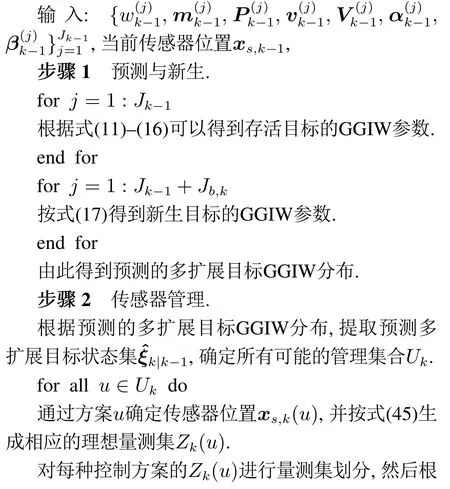
4.4 算法程序伪码
为了说明算法流程,列出扩展目标跟踪传感器控制算法伪码如下:

5 仿真分析
5.1 场景构建
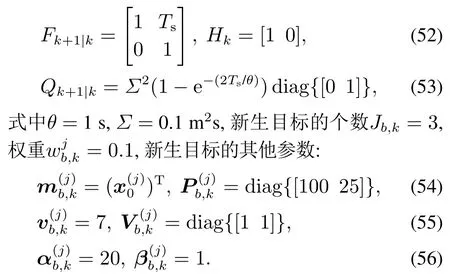
在[−1000,1000]×[−1000,1000](m2)的监控区域范围内设定有3个目标,针对这3个目标构造多扩展目标跟踪场景并进行蒙特卡罗(Monte Carlo,MC)仿真实验,通过设计不同的传感器管理方案进行对比并对实验结果进行分析.按照文中对OSPA参数的解释,结合实验数据分析,选取OSPA距离函数的参数p=1,c=2.参考文献[25],选取W-OSPA距离函数的参数分别为cγ=5,cx=10,cX=10,wγ=0.1,wx=0.7,wX=0.2.此外,按照已有文献[21]的常规取值,设定采样时间Ts=1 s,时间衰减常数τ=5,遗忘因子ηk=8,目标的存活概率和检测概率分别为pD=0.99和pS=0.99,杂波平均数λF A=5,高斯混合实现的最大高斯分量数Jmax=100.A和a分别表示扩展状态的长半轴和短半轴,3个目标的长半轴和短半轴均为A=4 和a=2.以椭圆长轴与笛卡尔坐标系x轴夹角为方向角,逆时针方向为正方向,椭圆方向角均设定为45°.每个扩展目标采样周期内的量测数目服从均值γ=15的泊松分布.目标的状态方程和量测方程如式(2)-(3)所示,其中
假设在k时刻传感器位置为xs,k=[xs,k ys,k]T,那么下一时刻传感器所有可能的位置集合Uk+1可表示为
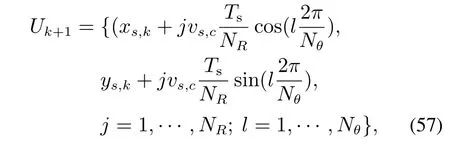
其中:NR=2,Nθ=8,则传感器的管理方案共有17种(包括传感器处于静默状态).vs,c是传感器自身容许的径向速度,取值为10 m/s.
5.2 多扩展目标不同状态估计性能评价
根据构建的仿真场景,多扩展目标参数如表1所示,多扩展目标真实运动轨迹如图1所示.
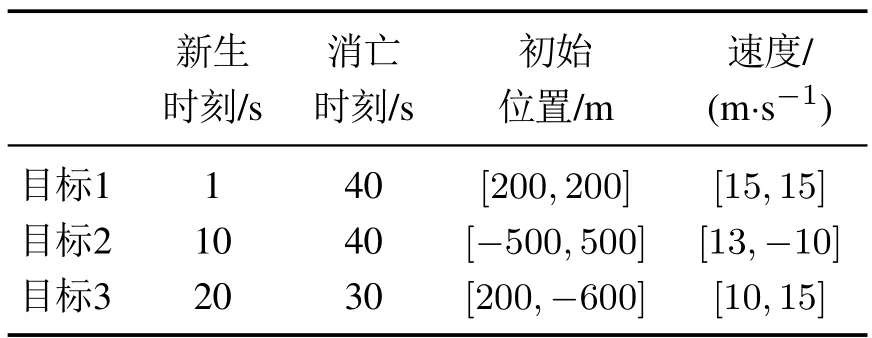
表1 多扩展目标初始参数Table 1 Initial parameters of multiple extended target
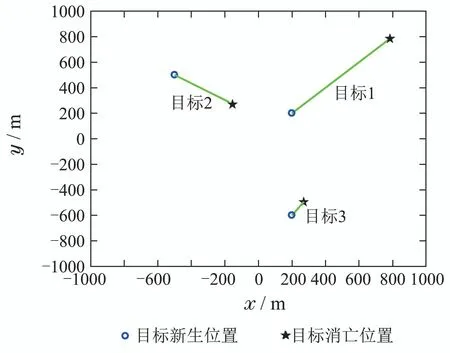
图1 目标的真实轨迹Fig.1 Actual target trajectories
为了验证所提传感器管理方案有效性,本文将所提方案与另外3种不同方案进行对比.其中,方案1是“Stationary”,即传感器保持静止.方案2是“Prior zigzag”,如图2 所示1种先验方案,即传感器按照预定轨迹运动.方案3是“Random control”,即从传感器动作集合所有方案中随机选择1种方案.方案4是“WOSPA based”,即本文所提传感器管理方案.
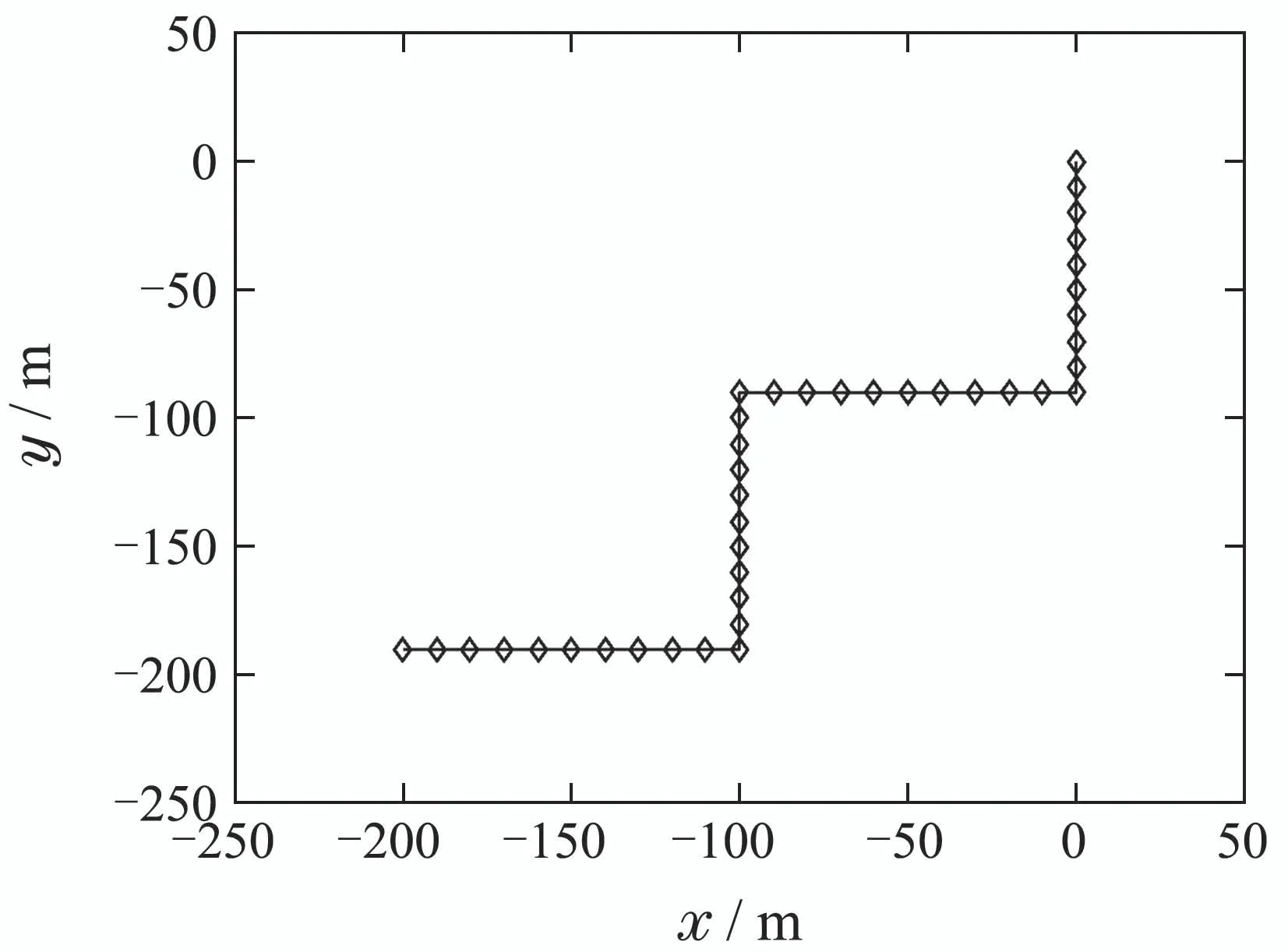
图2 方案2中的传感器控制轨迹Fig.2 Sensor control trajectory in the second control strategy
图3是单次MC仿真的多扩展目标形状估计的局部放大图.从图中可以看出,本文提出的传感器管理方案相比于其他3种方案,对扩展目标形状的估计效果更加逼近于目标的真实椭圆轮廓,可以有效体现所提传感器管理方案对目标质心位置与目标形状估计的一致性.图4是本文所提传感器管理算法在单次仿真试验中的传感器运动轨迹.在整个传感器管理过程中,传感器会依据多扩展目标跟踪W-OSPA离差最小化的准则不断调节自身的位置,以保证每周期都能获得最优的多扩展目标量测信息.从图中还可以看到,伴随着目标的新生和消亡,传感器的位置会随之发生相应的变化.这是由于随着目标的随机更替,多扩展目标后验离差也会发生明显的改变,为了适应这种变化传感器的位置会发生明显的机动控制,使自己处于最佳观测的位置.在目标数目突变完成后,传感器会依据离差最小化的原则进行相应的传感器轨迹控制,以满足传感器优化的预期性能.
图3 多扩展目标形状估计效果Fig.3 Multiple extended target shape estimation effect
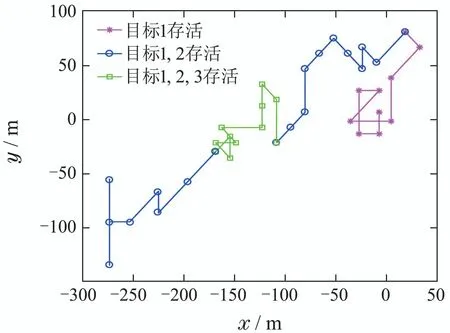
图4 单次MC方案4传感器控制轨迹Fig.4 Sensor control trajectory of single MC in the fourth control strategy
图5是100次MC仿真实验多扩展目标位置估计的OSPA距离统计.在多扩展目标跟踪中,由于扩展目标对应多个量测源信息,因此从图表看出各类方案对多扩展目标位置的估计精度都相对较高,并且OSPA距离具有收敛的整体趋势.然而,从图5可以看出,本文所提方案对多扩展目标位置的估计效果明显优于其他3种方案,即该方案对多扩展目标位置的估计最为接近目标的真实位置,在目标数目(势)稳定期间跟踪均呈显著的收敛趋势,从而有效验证了所提方法的跟踪一致性.由于所提传感器管理方案是基于GGIW分布多扩展目标跟踪的W-OSPA离差最小化建立传感器管理的目标函数,相对应的,所提传感器管理方案可以有效的实现对多扩展目标运动状态的优化.
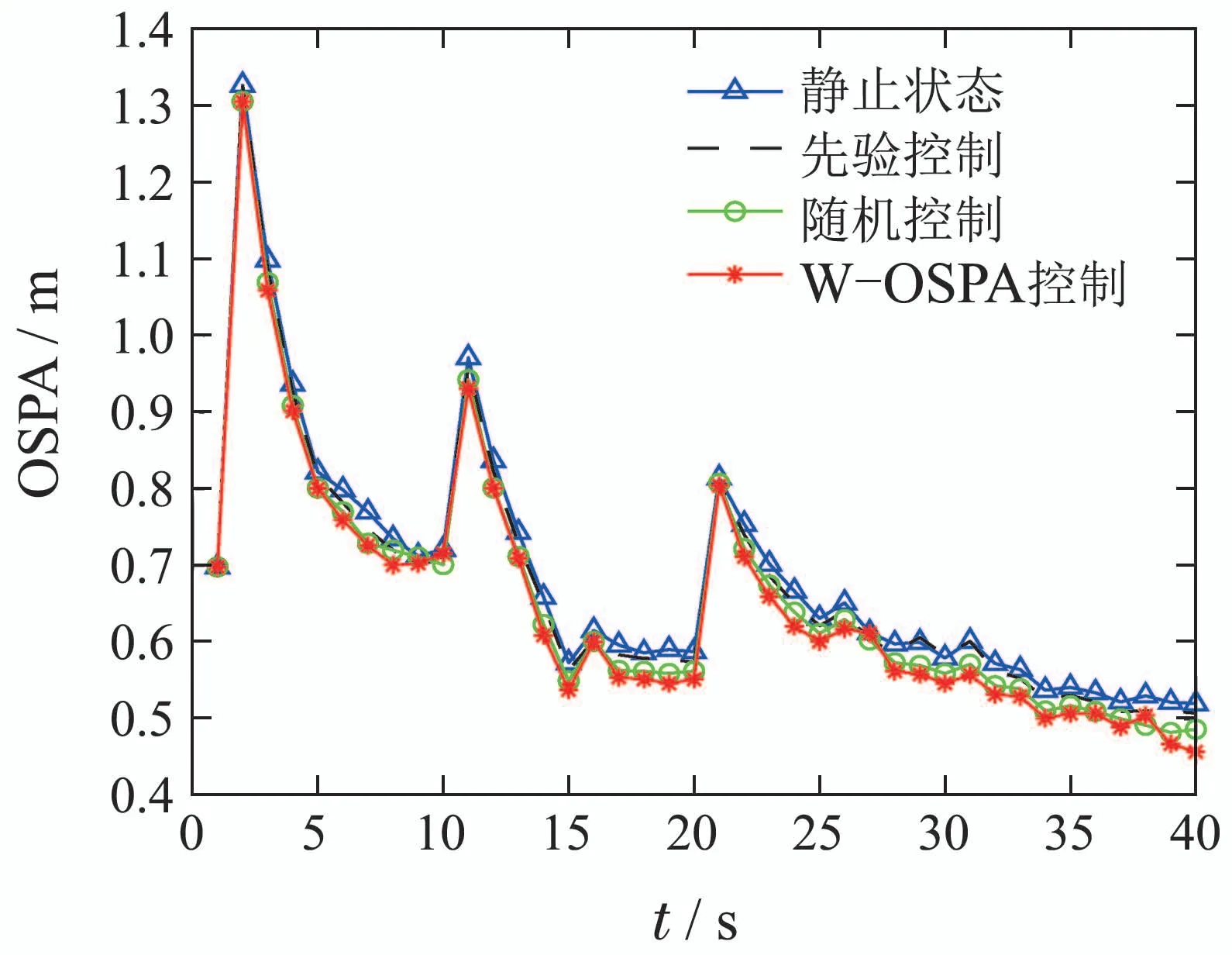
图5 4种传感器控制方案质心位置估计OSPAFig.5 OSPA statistics of four control strategies to centroid position estimation
图6和图7分别是MC仿真实验中对多扩展目标长轴和短轴估计的OSPA距离,表2是多扩展目标长轴和短轴估计的OSPA均值统计.从图表中看出4种方案对多目标形状估计的优劣,即本文所提算法对多扩展目标形状估计效果最好.
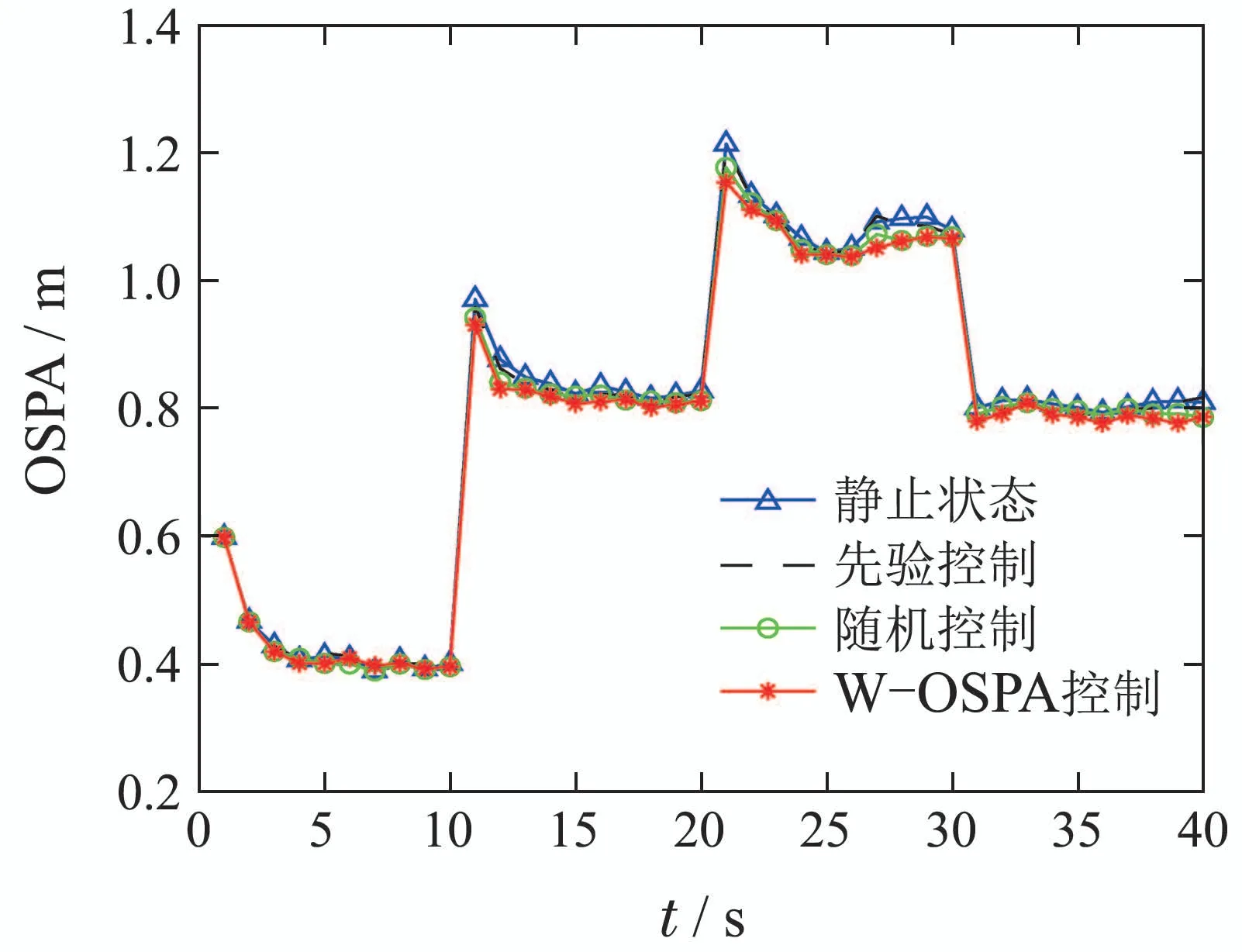
图6 长轴OSPA距离Fig.6 OSPA statistics of long axis
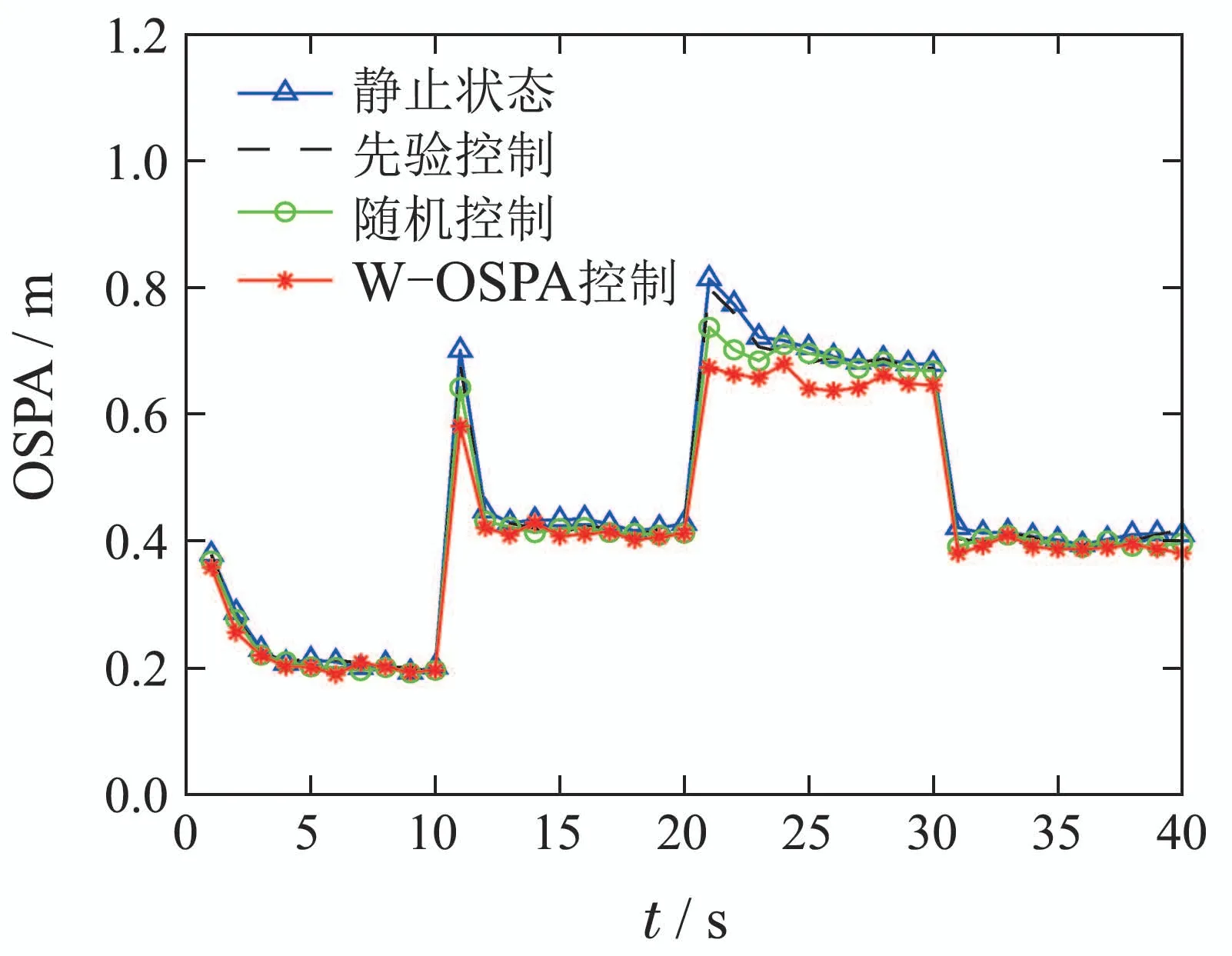
图7 短轴OSPA距离Fig.7 OSPA statistics of short axis
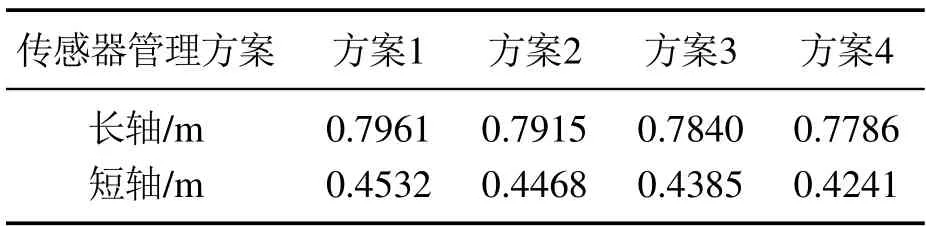
表2 各方案长轴和短轴的OSPA均值Table 2 The mean value of OSPA of the long axis and short axis of each strategie
图8给出了以W-OSPA距离为综合评价指标对4种传感器管理方案下多扩展目标状态估计的对比结果,表3是各方案下W-OSPA距离的统计均值.从图表中可以明显看出所提传感器管理方案下的多扩展目标状态W-OSPA距离总体最小,因此在对多扩展目标状态的综合优化上要优于其他3种方案.因为基于WOSPA的度量客观反映了多扩展目标综合状态(运动状态、形状、量测率)的估计效果,所以所提算法对多扩展目标综合状态优化的效果得以验证.

表3 各方案下W-OSPA的统计均值Table 3 The mean value of W-OSPA statistics of each strategie
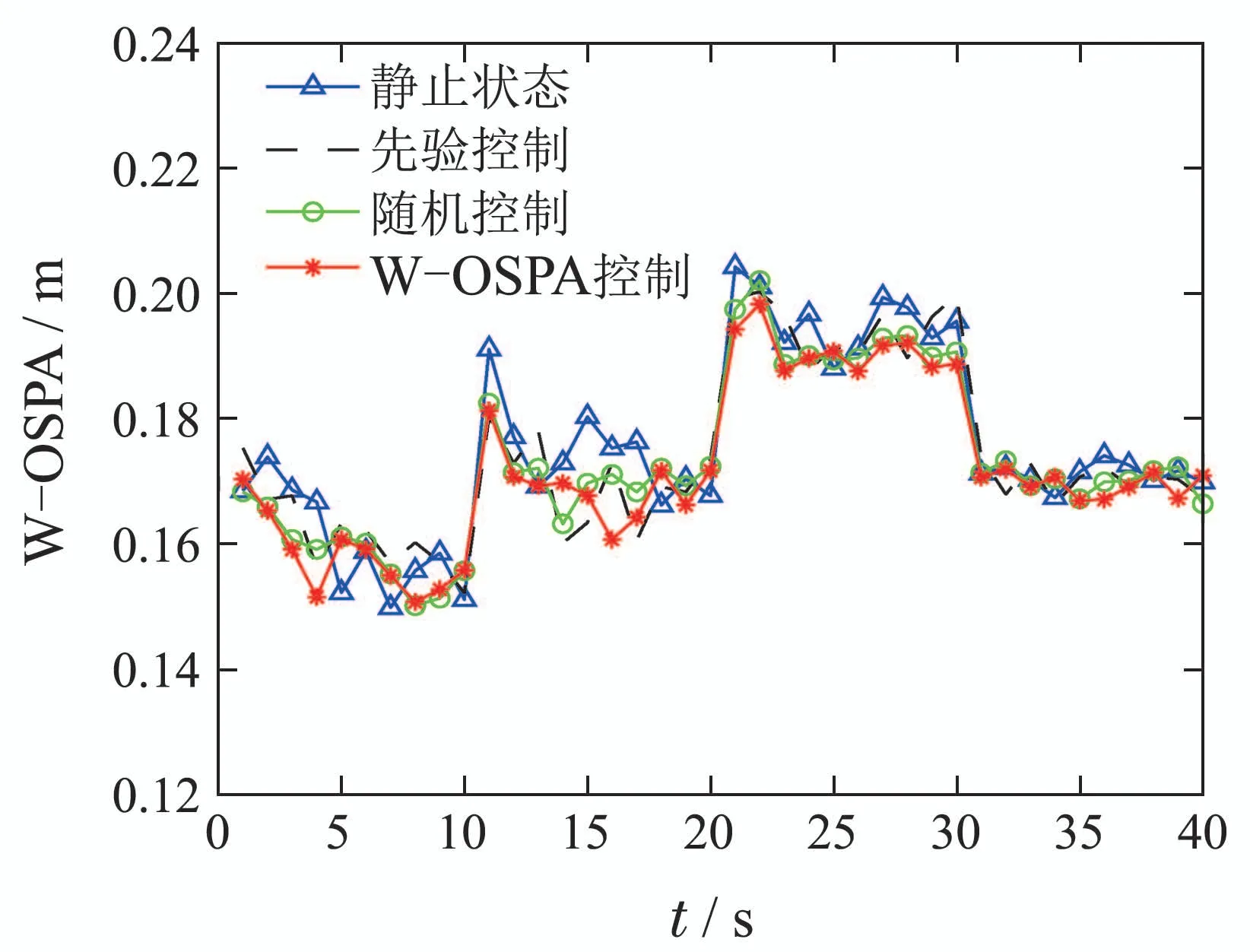
图8 4种传感器控制方案质心位置估计W-OSPA距离Fig.8 W-OSPA statistics of four control strategies to centroid position estimation
图9显示了在100次MC仿真实验中传感器的所有运动轨迹,即传感器运动轨迹云.从图中可以看出在同一最优准则下单次MC中传感器的运动轨迹是不尽相同的,这是由于受到杂波和噪声等随机因素的影响,每次仿真中传感器的管理决策方案都会相应的发生变化,但是从传感器运动轨迹云中依旧可以看出传感器优化运动的总体趋势以及整个跟踪优化过程中传感器控制运动所在的大致区域.
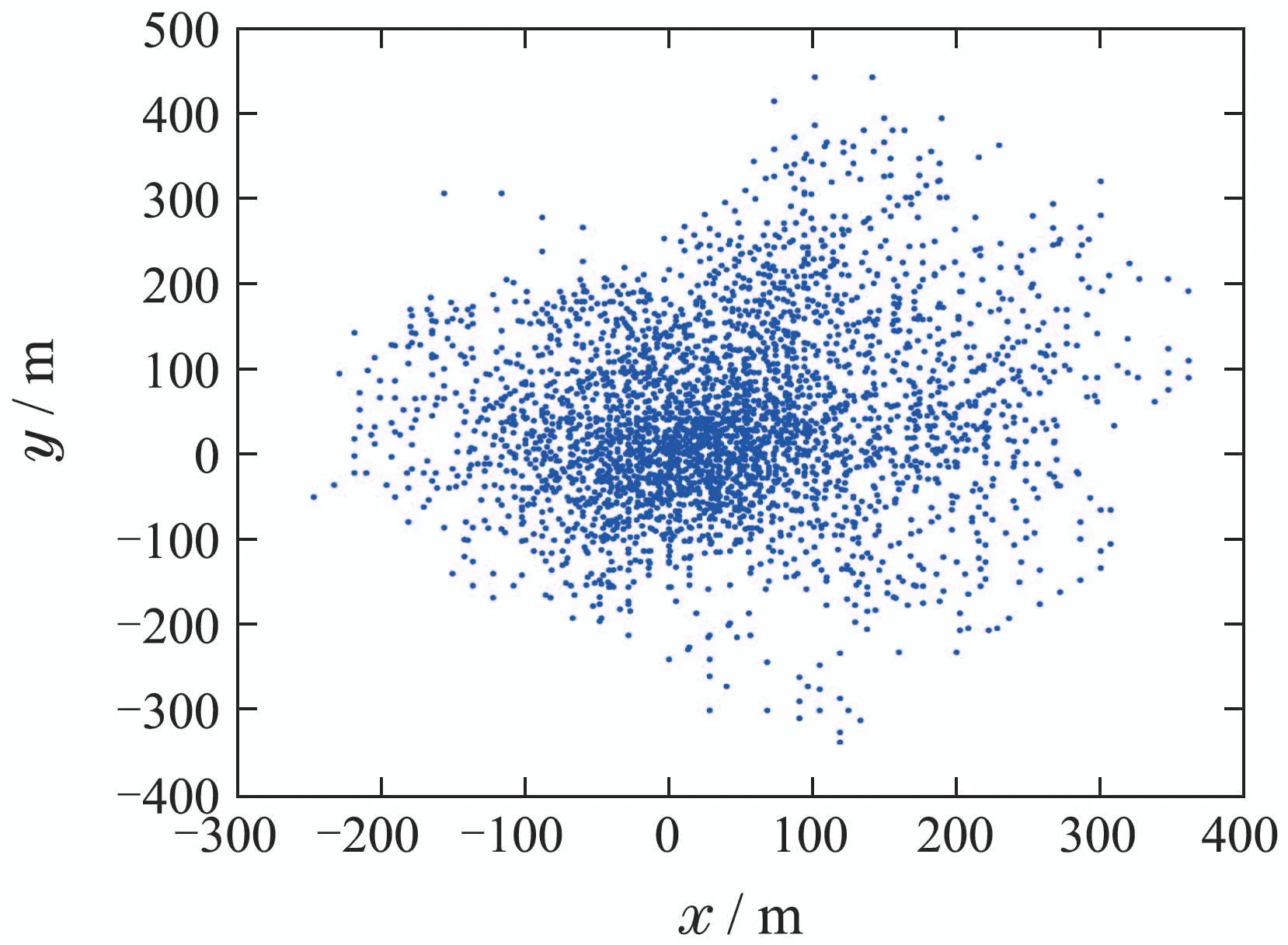
图9 传感器的轨迹云Fig.9 Sensor trajectory cloud
6 结论
本文的重点和创新点是在POMDP的理论框架下,提出了一种基于任务论的多扩展目标传感器管理方法.该传感器管理方法中,以联合优化多扩展目标运动状态和扩展(形状)状态为目的设计传感器管理策略,利用W-OSPA距离构造多扩展目标伽玛高斯逆威沙特(gamma Gaussian inverse Wishart,GGIW)分布的离差,提出了离差最小化的多扩展目标跟踪优化的传感器管理策略.最后,通过仿真实验验证了所提算法的有效性.所提方案的意义在于,依据所提传感器管理优化算法,成功使得多扩展目标运动状态估计与形状估计实现了联合优化,同时其估计精度得到有效提升.显然,这对实现跟踪精度要求更高且带形状估计信息的多扩展目标跟踪优化问题具有重要的理论价值,并且可以进一步推广至其他类型的多扩展目标传感器管理问题中.
