工业场景下基于秩信息对YOLOv4的剪枝
2022-06-21秦晓成苗张绍兵何莲石向文王品学曾尚
秦晓,成苗,3*,张绍兵,3,何莲,石向文,王品学,曾尚
(1.中国科学院 成都计算机应用研究所,成都 610041;2.中国科学院大学 计算机科学与技术学院,北京 100049;3.深圳市中钞科信金融科技有限公司,广东 深圳 518206)(∗通信作者电子邮箱chengmiao@cbpm‑kexin.com)
工业场景下基于秩信息对YOLOv4的剪枝
秦晓1,2,成苗1,2,3*,张绍兵1,2,3,何莲1,3,石向文1,2,王品学1,2,曾尚1,2
(1.中国科学院 成都计算机应用研究所,成都 610041;2.中国科学院大学 计算机科学与技术学院,北京 100049;3.深圳市中钞科信金融科技有限公司,广东 深圳 518206)(∗通信作者电子邮箱chengmiao@cbpm‑kexin.com)
在工业场景无线射频识别(RFID)实时缺陷检测任务中,为了保证检测精度以及速度常采用YOLO这类深度学习目标检测算法,然而这些算法仍然难以满足工业检测中的速度要求,且无法将相应的网络模型部署到资源受限的设备上。针对以上问题,需要对YOLO模型进行剪枝压缩,提出了一种基于秩信息的特征信息丰富性和特征信息多样性加权融合的新型网络剪枝方法。首先,加载未剪枝模型进行推理,并在前向传播中获取滤波器对应特征图的秩信息来衡量特征信息丰富性;然后,根据不同大小的剪枝率对秩信息进行聚类或者相似度计算来衡量特征信息的多样性;最后,加权融合得到对应滤波器的重要性程度并对其进行排序后,剪除重要性排序靠后的滤波器。实验结果表明,对于YOLOv4,在剪枝率为28.87%且特征信息丰富性权重为0.75的情况下,所提方法相较于单一使用特征图秩信息的方法提高了2.6%~8.9%的平均精度均值(mAP),所提方法剪枝后的模型甚至相较于未剪枝模型提高了0.4%的mAP并减少了35.0%的模型参数,表明该方法有利于模型部署。
无线射频识别;YOLO;网络剪枝;特征信息丰富性;特征信息多样性;秩信息
0 引言
无线射频识别(Radio Frequency IDentification, RFID)[1]是一种无接触自动识别技术,利用射频信号及其空间耦合传输特性,实现对静止的或移动中的待识别物品的自动识别,具有识别距离远、识别速度快、抗干扰能力强等优点。RFID电子标签多以印刷天线为柔性基底,其天线布线图案的加工质量决定着信息传递的可靠性。图案常见的缺陷包括断线、粘连、凹毛刺、凸毛刺、孔洞和污点等,如图1所示。缺陷会影响天线的电学性能,在使用过程中导致短路或者断路。因此在RFID的生产过程中,瑕疵检测是一个非常重要的环节。

图1 RFID缺陷类别Fig. 1 RFID defect category
目前在国内中小型标签生产厂家对标签天线的质量检测主要是外观缺陷检测。传统人眼查看方法效率低且主观意识强,不利于大规模实施快速检测。现在基于计算机视觉的缺陷检测方法主要分为传统计算机图像检测方法和深度学习检测算法。传统的图像检测方法由于泛化能力差、对图片要求高,不利于RFID快速检测。深度学习检测算法,主要分为一阶段检测算法YOLO(You Only Look Once)系列和二阶段检测算法R-CNN(Region with Convolutional Neural Network)系列等,由于在工业检测中对检测的实时性要求高,常常更偏向于采用一阶段算法。
事实上,随着YOLO发展到最新的YOLOv4,更深更广的体系结构提高了其检测能力,但是已经无法达到工业检测中的速度要求。为了在资源有限的设备上完成RFID缺陷检测任务,有必要使用模型压缩技术在保证原有模型正确率的同时获得计算量相对较低的YOLO模型,从而有利于算法的部署。
目前流行的模型压缩技术主要有参数量化、低秩分解、知识蒸馏、网络剪枝四种,其中网络剪枝在各种新兴应用中显示出广阔的前景。
最新的网络剪枝方法主要分为非结构化剪枝方法[2-5]和结构化剪枝方法[6-9]。非结构化剪枝是对单个神经元通过给参数预先设定一个阈值进行剪枝,需要下层的硬件和计算库对其有比较好的支持,精度高但是不方便做部署;反之结构化剪枝方法则是对滤波器进行剪枝,虽然粒度粗但是更有利于部署。结构化剪枝分为两类:第一类是通过寻找深度神经网络中自身属性来衡量滤波器重要程度,然后直接剪除重要性程度低的滤波器的方法,如Li等[10]提出了计算滤波器中所有权值的绝对值之和,按大小排序来决定滤波器重要程度,剪除小的权重和所对应的滤波器。Liu等[11]提出了使用经过稀疏训练后的BN(Batch Normalization)层系数来进行剪枝,直接剪除低系数所对应的滤波器。而Lin等[7]提出了HRank(High Rank),将剪枝分为3步:特征图生成、滤波器选择以及微调。首先,将部分图像输入模型,得到各个滤波器对应的特征图;其次,根据得到的特征图,计算每个滤波器对应的秩,作为滤波器选择的准则;然后,通过卷积层中特征图秩大小来衡量对应滤波器重要程度,剪除秩小的特征图所对应的滤波器;最后,微调进行精度恢复训练。第二类则是通过寻找到滤波器内在冗余,剪除相似冗余的滤波器,如Wang等[12]将子空间聚类应用于特征映射,以消除滤波器中的冗余。百度提出的FPGM(Filter Pruning via Geometric Median)[6]则是首先将滤波器权重进行相似度分析,然后将相似度高的滤波器进行剪除。
综上,之前的研究往往侧重于找到更为合适的属性来表征滤波器的重要程度,然后剪除重要性低的滤波器,或者通过对卷积层本身特征进行分析,然后找到相似冗余部分的滤波器进行剪除,多是单一的处理方式。一个卷积层对应不同剪枝策略的剪枝过程如图2所示,由浅及深的填充色小块表示特征图秩的高低,其中通过特征图秩的大小来衡量滤波器的权重。对于HRank剪枝方法而言,使用特征图秩的大小决定滤波器重要性程度,然后将滤波器按照特征图秩大小由低到高进行剪除,只会保留高秩部分滤波器而忽略其他秩低但更为重要的滤波器。而对于FPGM等剪枝方法,通过对特征图秩进行相似度分析来得到每一个滤波器的相似性度量,优先删除相似性程度高的冗余的滤波器,在一定条件下可能过多地剪除信息丰富的滤波器。
对于YOLO剪枝而言,本文认为不能单一追求特征信息丰富性或者特征多样性,融合两种剪枝方法能够取得更好的效果,主要完成了以下工作:
1)分析了网络剪枝中剪枝率与卷积层中特征图秩浮动范围的关系。
2)使用HRank中的特征图秩属性来代替使用经过稀疏训练后的BN层参数来衡量特征信息丰富性。
3)在高剪枝率下使用K-means聚类的方式来代替FPGM中提出的相似度分析来衡量特征信息多样性。
4)分析YOLO特征图秩内在联系,根据剪枝率、秩的浮动范围动态调整特征丰富性权重与特征多样性权重,然后将特征信息丰富性和特征信息多样性进行加权融合,最终得到滤波器的重要性程度。

图2 基于秩信息采取不同剪枝策略的剪枝结果Fig. 2 Pruning results with different pruning strategies based on rank information
1 相关工作
对于结构化剪枝方法而言,按照剪枝策略通常可以分为两类:
1)将模型剪枝转化为一个优化问题找到最优的模型结构。剪枝的本质并不应该是选择重要的滤波器,而应该是确定滤波器的数量,如Luo等[8]提出的ThiNet(Thinner Net),根据卷积层滤波器的输出来判断该滤波器是否对结果有贡献,如果没有贡献或贡献很小,则直接把这个滤波器去掉,其认为如果可以用某一层输入的一个子集代替原来的输入,能得到尽可能类似原来输出的话,那么子集以外的输入就可以去掉,同时其对应的前面一层的滤波器也可以去掉。Liu等[13]提出的通道修剪的实质在于找到最优的修剪结构,即每层的通道数,而不是选择“重要”的通道。Lin等[9]提出的ABCPrune(Artifical Bee Colony Prune)通过预设每一层的剪枝率,然后将整个训练当作一个优化任务,通过最终的训练结果得到最优的剪枝率组合。
2)寻找卷积层内在属性的属性大小来表征滤波器重要程度或者冗余程度来删除属性值低的滤波器或者相似度高的滤波器。对于YOLOv4剪枝任务而言,通常已经训练好了一个过度参数化模型,往往采用ThiNet中的三阶段剪枝流程,即训练过度参数化模型、剪枝和微调。最为常用的方法则是Liu等[11]提出的通过稀疏训练的BN层的参数来作为滤波器重要性的指标。百度提出的FPGM[6]阐述了单一通过使用大小来衡量滤波器进行剪枝的有效性必须满足两个前提:一是要求滤波器参数数据分布的偏差足够大,确保在宽泛的分布区间内,通过阈值化处理能够有效分离数据;二是要求被剪除的滤波器的参数足够小,对网络推理精度的贡献也足够小,确保裁剪掉这些滤波器之后,对模型精度不会造成存在较大影响。Lin等[7]提出了一种新的基于特征图秩大小衡量滤波器重要性的剪枝方法HRank,对特征图秩的大小进行排序,删除特征图秩低的滤波器,其系统性证明了通过秩大小来表征滤波器重要程度的可行性及有效性,同时在YOLO剪枝中也取得了很好的效果。
2 剪枝算法
2.1 剪枝层选取
YOLOv4主要包含Backbone、Neck和预测分支三个部分。Backbone采用CSPDarknet53网络结构,CSP就是CSPNet(Cross Stage Partial Network)[14]里面的跨阶段局部融合网络,Darknet53沿用的是YOLOv3[15]中的骨干网络,Neck主要结合了SPP(Spatial Pyramid Pooling)[16]、FPN(Feature Pyramid Network)[17]以及PAN(Pixel Aggregation Network)[18]等模块的方式,因此在整个YOLOv4中除了普通的卷积层外,还有着大量的特征融合模块。如图3所示,CONV在YOLO中是卷积层、归一化层和激活层的集合,特征融合块主要是YOLO中的shortcut、route。为了对YOLOv4特征融合层进行剪枝,同时保证特征融合模块完整性,在图3(a)中CONV2与CONV4和特征融合层无关联可以进行剪除,图3(b)中CONV7可以进行剪除,其余卷积层与特征融合层相关,如果进行剪枝操作容易导致通道错误的问题。
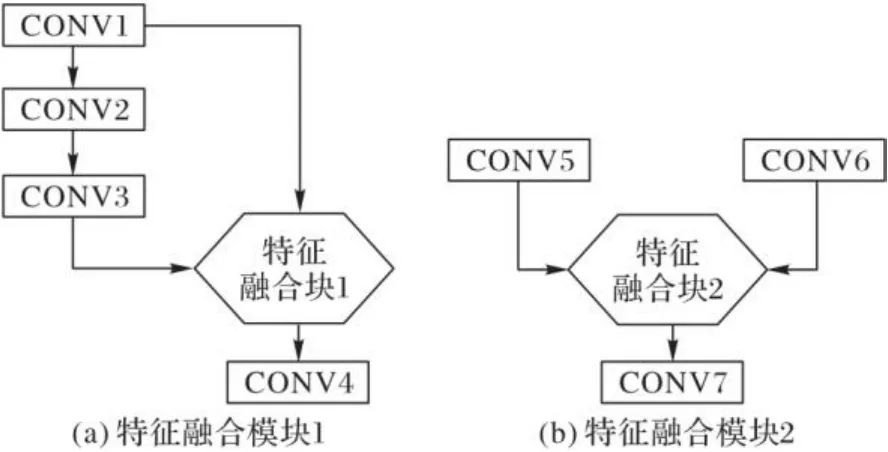
图3 YOLOv4中存在的不同特征融合结构Fig. 3 Different feature fusion structures existing in YOLOv4 layer
2.2 剪枝率选取策略
剪枝率对于剪枝任务而言是个极度重要的参数,随着剪枝率的提高模型越来越小,模型的准确率等指标则相应下滑。
当模型一致时,模型大小与推理的时间成反比,一个剪枝任务的平均剪枝率可以根据任务需求大体确定,但是整个剪枝率组合却是一个随着剪枝层增加而呈指数级递增的集合。用于完成常见的深度学习任务如分类、目标检测、分割等任务的大网络,通常剪枝率的设置无法通过类似如ThiNet、ABCPrune等网络的做法来学习一个最优的网络结构,所以如何找到一个次优的剪枝结构对于剪枝任务而言至关重要。
本文认为在一定的epoch精度回归条件下,对于特征图秩浮动范围大的卷积层,其整体的组合更不可拆分,对应的剪枝率应该较小;反之秩浮动范围小的层,其冗余的滤波器较多,应赋予其较大的剪枝率。如图4所示,ABCPrune在不同公共网络中训练好的剪枝率组合与其对应剪枝层的秩浮动范围对比。实线部分是在VGG、GoogleNet、DenseNet、ResNet中各个剪枝层归一化后的秩浮动范围,计算式如下:

图4 剪枝率与秩浮动范围的关系Fig. 4 Relationship between pruning rate and rank fluctuation range
对于RFID数据集而言,加载未剪枝YOLOv4模型后,YOLOv4的秩浮动范围如图5所示,其秩浮动范围变化与ABCPrune中公共网络保持一致,表明对于YOLOv4骨干网络中的卷积层的剪枝率应该设置偏低,而后面的卷积层剪枝率则设置偏高。
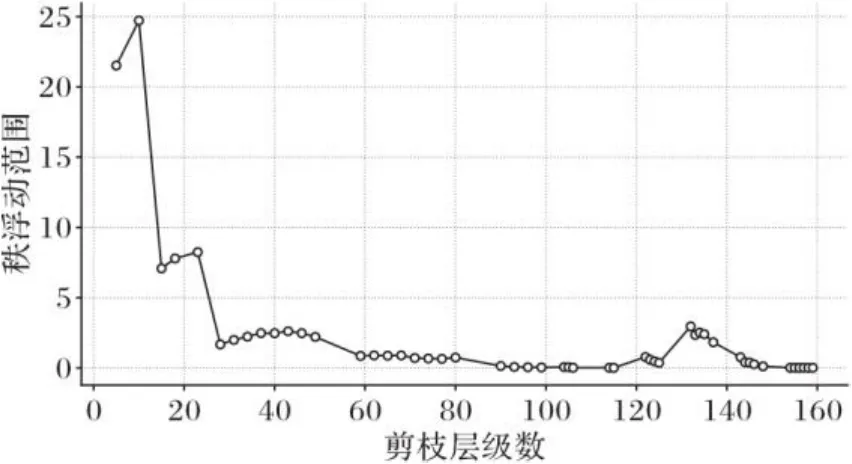
图5 YOLOv4剪枝层对应的秩浮动范围Fig. 5 Rank fluctuation range corresponding to YOLOv4 pruning layer
因此的剪枝率设置策略伪代码如算法1所示。
算法1 剪枝率设置算法。
输入conv,ranki,low,mid,high;
输出compress_rate_list。
4) end for
9) end for
14) end for
2.3 剪枝策略
虽然用BN层参数来表征滤波器的丰富程度是可行的,但是需要稀疏训练来保证参数的有效性,从而给剪枝增加了额外的训练成本并提高了对剪枝人员的专业要求,因此本文使用HRank中的通过秩大小来衡量滤波器信息的丰富程度。
对于RFID数据集而言,其图像纹理多为规律线条,加载未剪枝YOLOv4模型后,如图5所示对剪枝层特征图秩浮动范围观察发现,前面的骨干网络部分的剪枝层秩浮动范围较大,而后面的分支秩浮动范围较小,若单一使用HRank对YOLO进行剪枝,在网络高层时不满足FPGM提出的使用单一属性来衡量滤波器重要性的有效前提,即确保单一属性处于广泛的区间。本文认为HRank能够衡量滤波器特征信息丰富性,而FPGM中相似度计算则能够衡量特征信息多样性,结合两种剪枝策略能够取得更好的效果。
然而当秩浮动过小时,因为特征图秩大小相近,使用FPGM相似度计算衡量特征信息多样性来进行剪枝增加了高秩所对应的滤波器被误剪的可能性,此时使用K-means聚类算法来代替相似度计算,可以在一定程度上减少这种可能。如图6所示,剪枝率为50%,使用K-means算法来计算特征多样性相较于相似度计算方法在秩浮动范围较小时,能够在一定情况下保证特征图秩更大的滤波器的重要性程度更高。
基于上述分析,提出在RFID缺陷检测中对YOLOv4进行剪枝时基于特征信息丰富性与特征信息多样性融合的剪枝策略,如式(2)所示:
算法2 剪枝算法。
输入α,conv,ranki,pi,ni,epochNum;
输出res。
4) ∥根据剪枝率来选取K‑means算法或者相似度计算 ∥特征信息多样性
5) ∥K‑means算法
12) end for
13) ∥相似度计算
19) end for
20) end while
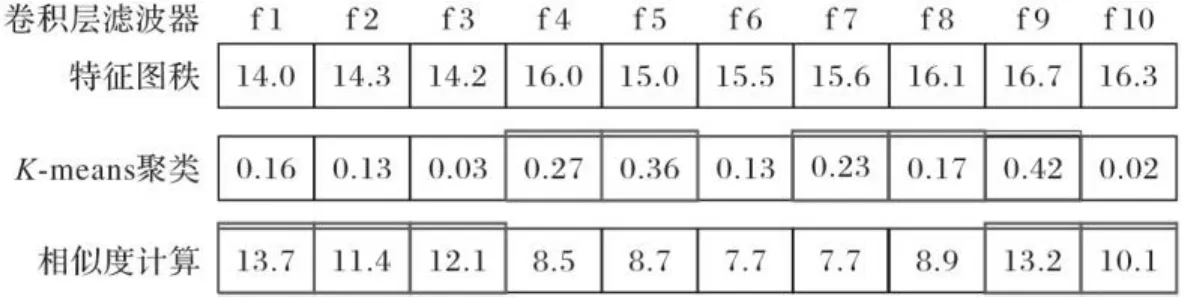
图6 相似度计算算法与K-means算法对比Fig. 6 Comparison of similarity calculation algorithm and K-means algorithm

图7 不同过程中的剪枝对比Fig. 7 Pruning comparison among different processes

图8 随着取值变化的mAP情况Fig. 8 mAP with change of value
3 实验与结果分析
本文采用从某物联网公司现场收集到的RFID数据集,包含3 000余张图片,其中包括各类缺陷图片如断线、粘连、凹毛刺、凸毛刺、孔洞和污点等;同时对YOLOv4最终选取的50个满足要求的卷积层进行网络剪枝。由于需要部署的平台显卡为NVIDIA GeForce RTX 2080,同时满足的一张图片检查时间不超过7 ms,选取平均剪枝率为28.87%,其各个剪枝层所对应的剪枝率如图9所示。
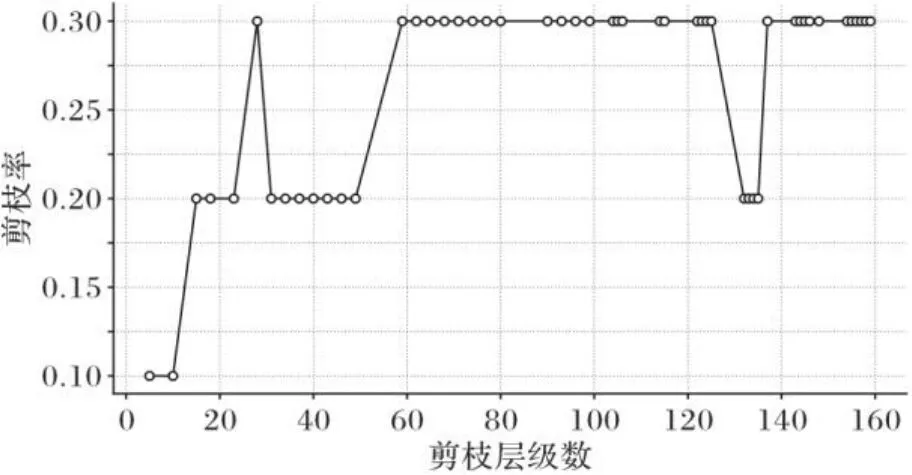
图9 不同剪枝层对应的剪枝率Fig. 9 Corresponding pruning rate of different pruning layer
图9中曲线是平均剪枝率为28.87%时剪枝率组合为(0.1,0.2,0.3),其中0.1对应为低剪枝率,0.2对应为中等剪枝率,0.3对应了高剪枝率。在平均剪枝率为28.87%、剪枝率组合为(0.1,0.2,0.3)时不同特征信息丰富性权重的剪枝结果如表1所示,其中包括以下衡量指标:mAP、算力和模型参数量。
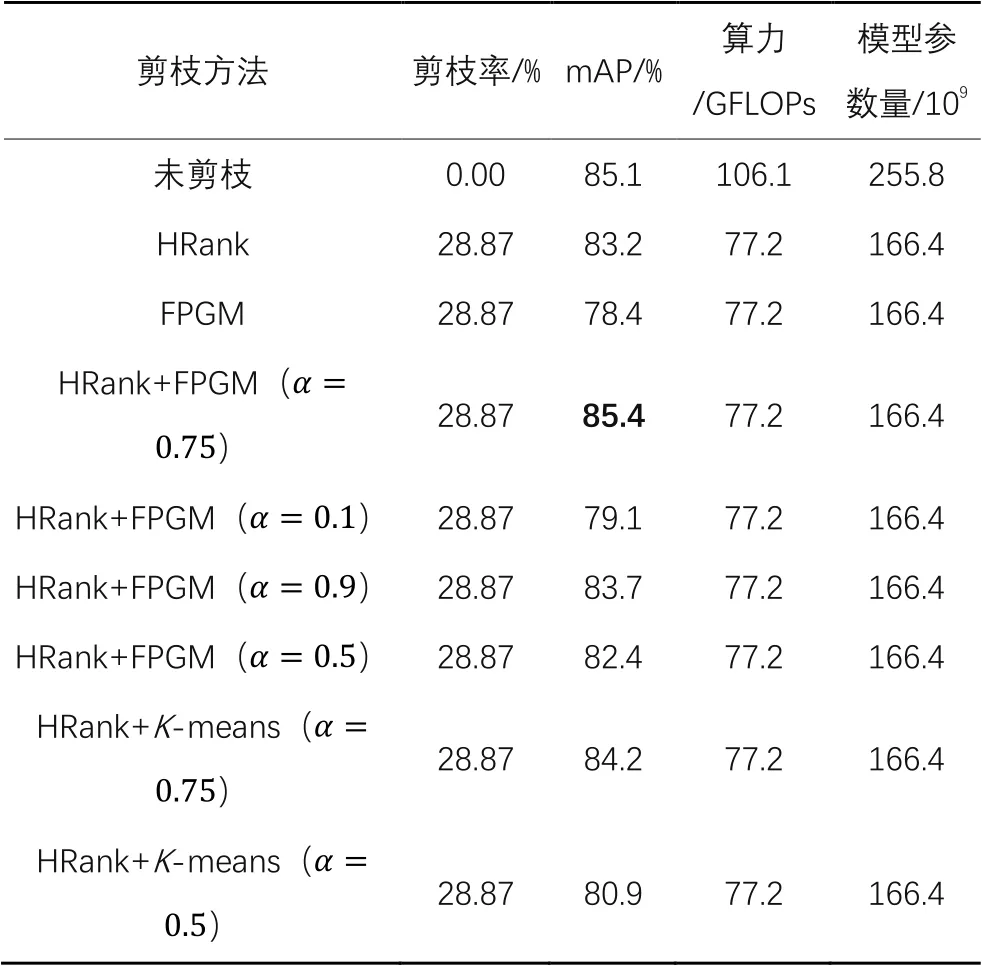
表1 剪枝率为28.87%下的剪枝方法对比Tab. 1 Comparison of pruning methods with pruning rate of 28.87%
由表1可以看出,使用HRank+FPGM融合剪枝策略在特征信息丰富性权重、剪枝率较低时相较HRank剪枝方法mAP提高了2.6%,相较FPGM提高了8.9%,甚至相较未剪枝模型提高了0.4%,所有的融合剪枝策略都比FPGM的mAP高。
为了验证使用融合剪枝在高剪枝率下也优于单一使用秩信息进行剪枝的方法,使特征信息丰富性权重,平均剪枝率为72.2%,然后进行剪枝的结果如表2所示。在高剪枝率下,使用HRank+K-means融合剪枝策略也同样取得了较好的效果。

表2 剪枝率为72.2%下的剪枝方法对比Tab. 2 Comparison of pruning methods with pruning rate of 72.20%
4 结语
在RFID缺陷检测任务中,本文提出了动态融合特征图秩信息丰富性和多样性来对YOLO进行剪枝,在保证原有精度不损失的前提下,模型参数量减少了35.0%,达到了部署要求;同时实验结果验证了所提方法的可行性和有效性。但是本文方法针对特征秩信息丰富性权重值进行的实验仍存在不足,实验过程中使得剪枝效果表现较好,但可能存在着更优的值。对于这个参数未来可以考虑结合深度学习方法来进行动态设置。
[1] 孟秋云,殷宪祯,徐鹤.基于USRP的无线射频识别平台设计与实现[J].计算机技术与发展,2021,31(3):168-173.(MENG Q Y, YIN X Z, XU H. Design and implementation of RFID platform based on USRP [J]. Computer Technology and Development, 2021, 31(3): 168-173)
[2] HAN S, POOL J, TRAN J, et al. Learning both weights and connections for efficient neural networks [C]// Proceedings of the 2015 28th International Conference on Neural Information Processing Systems. Cambridge: MIT Press, 2015: 1135-1143.
[3] CARREIRA-PERPINAN M A,IDELBAYEV Y. “Learning-compression” algorithms for neural net pruning [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018:8532-8541.
[4] DONG X, CHEN S Y, PAN S J. Learning to prune deep neural networks via layer-wise optimal brain surgeon [C]// Proceedings of the 2017 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 4860-4874.
[5] GUO Y W, YAO A B, CHEN Y R. Dynamic network surgery for efficient DNNs [C]// Proceedings of the 2016 30th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2016: 1387-1395.
[6] HE Y, LIU P, WANG Z W, et al. Filter pruning via geometric median for deep convolutional neural networks acceleration [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019:4335-4344.
[7] LIN M B, JI R R, WANG Y, et al. HRank: filter pruning using high-rank feature map [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020:1526-1535.
[8] LUO J H, WU J X, LIN W Y. ThiNet: a filter level pruning method for deep neural network compression [C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 5068-5076.
[9] LIN M B, JI R R, ZHANG Y X, et al. Channel pruning via automatic structure search [C]// Proceedings of the 2020 29th International Joint Conference on Artificial Intelligence. California: IJCAI Organization, 2020: 673-679.
[10] LI H, KADAV A, DURDANOVIC I, et al. Pruning filters for efficient ConvNets [EB/OL]. [2021-02-09].https://arxiv.org/pdf/1608.08710.pdf.
[11] LIU Z, LI J G, SHEN Z Q, et al. Learning efficient convolutional networks through network slimming [C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 2755-2763.
[12] WANG D, ZHOU L, ZHANG X N, et al. Exploring linear relationship in feature map subspace for ConvNets compression[EB/OL]. [2021-02-09]. https://arxiv.org/pdf/1803.05729.pdf.
[13] LIU Z, SUN M J, ZHOU T H, et al. Rethinking the value of network pruning [EB/OL].[2021-02-09]. https://arxiv.org/pdf/1810.05270.pdf.
[14] WANG C Y, LIAO H Y M, WU Y H, et al. CSPNet: a new backbone that can enhance learning capability of CNN [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020:1571-1580.
[15] REDMON J, FARHADI A. YOLOv3: an incremental improvement [EB/OL]. [2021-02-09]. https://arxiv.org/pdf/1804.02767.pdf.
[16] HE K M, ZHANG X Y, REN S Q, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916.
[17] LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE,2017: 936-944.
[18] LIU S, QI L, QIN H F, et al. Path aggregation network for instance segmentation [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE,2018: 8759-8768.
Pruning of YOLOv4 based on rank information in industrial scenes
QIN Xiao1,2, CHENG Miao1,2,3*, ZHANG Shaobing1,2,3, HE Lian1,3, SHI Xiangwen1,2,WANG Pinxue1,2, ZENG Shang1,2
(1.Chengdu Institute of Computer Application,Chinese Academy of Sciences,Chengdu Sichuan610041,China;2.School of Computer Science and Technology,University of Chinese Academy of Sciences,Beijing100049,China;3.Shenzhen CBPM-KEXIN Banking Technology Company Limited,Shenzhen Guangdong518206,China)
In the Radio Frequency IDentification (RFID)real-time defect detection task in industrial scenes,the deep learning target detection algorithms such as You Only Look Once (YOLO) are often adopted in order to ensure the detection precision and speed. However, these algorithms are still difficult to meet the speed requirement of industrial detection, and the corresponding network models cannot be deployed on resource-constrained devices. To solve these problems, the YOLO model must be pruned and compressed. A new network pruning method of the weighted fusion of feature information richness and feature information diversity based on rank information was proposed. Firstly, the unpruned model was loaded and reasoned,and the rank information of the corresponding feature maps of the filters was obtained in forward propagation to measure the feature information richness. Secondly, according to the different pruning rates, the rank information was clustered or the similarity of the rank information was calculated to measure the feature information diversity. Finally, the importance degrees of the corresponding filters were obtained after the weighted fusion and were sorted, and the filters with low importance were cut off. Experimental results show that, for YOLOv4,when the pruning rate is 28.87% and the weight of feature information richness is 0.75, the proposed method has the mean Average Precision (mAP) improved by 2.6%8.9% compared with the method that uses rank information of the feature maps alone, and the model pruned by the proposed method even has the mAP increased by 0.4% and the model parameters reduced by 35.0% compared with the unpruned model, indicating that the proposed method is conducive to the model deployment.
Radio Frequency IDentification(RFID); You Only Look Once (YOLO); network pruning; feature information richness; feature information diversity; rank information
TP391.4
A
1001-9081(2022)05-1417-07
10.11772/j.issn.1001-9081.2021030448
2021⁃03⁃24;
2021⁃07⁃28;
2021⁃07⁃29。
秦晓(1995—),男,四川成都人,硕士研究生,主要研究方向:人工智能、机器视觉; 成苗(1983—),男,四川成都人,高级工程师,硕士,主要研究方向:人工智能、机器视觉; 张绍兵(1979—),男,四川成都人,正研级高级工程师,硕士,主要研究方向:高速图像处理、缺陷检测、深度学习; 何莲(1983—),女,四川西充人,高级工程师,博士,主要研究方向:人工智能、机器视觉; 石向文(1991—),男,湖南永州人,硕士研究生,主要研究方向:人工智能; 王品学(1993—),男,四川成都人,硕士研究生,CCF会员,主要研究方向:小样本学习、表面缺陷检测; 曾尚(1995—),男,湖北荆门人,硕士研究生,主要研究方向:人工智能。
QIN Xiao, born in 1995,M. S. candidate. His research interests include artificial intelligence, machine vision.
CHENG Miao, born in 1983,M. S., senior engineer. His research interests include artificial intelligence, machine vision.
ZHANG Shaobing, born in 1979,M. S., research senior engineer. His research interests include high-speed image processing, defect detection, deep learning.
HE Lian, born in 1983,Ph. D., senior engineer. Her research interests include artificial intelligence, machine vision.
SHI Xiangwen, born in 1991,M. S. candidate. His research interests include artificial intelligence.
WANG Pinxue, born in 1993,M. S. candidate. His research interests include few-shot learning, surface defect detection.
ZENG Shang, born in 1995,M. S. candidate. His research interests include artificial intelligence.
