四桥臂有源滤波器的三电平3D-SVPWM 控制策略研究
2022-06-21张晓程姚祥肖柱沈光辉
张晓,程姚祥,肖柱,沈光辉
(1.中国矿业大学电气与动力工程学院,江苏 徐州 221116;2.国网湖南省电力有限公司张家界供电分公司,湖南 张家界 427000)
0 引言
在电力系统中出现的大量无功及谐波分量会使得电网损耗增加,还会缩短设备使用寿命,严重情况还会导致电网无法运行,严重影响电能质量[1]。有源滤波器(active power filter,APF)是现如今解决此问题的一大方案,是谐波整治的研究热点,在西方发达国家已经得到了广泛应用,提高APF 系统的效率也是提高电能质量、减少能耗的重要途径。
文献[2-4]针对APF 中点电压及共模电压,所提控制策略可有效维护APF 稳定运行。文献[5-8]提供了谐波电流检测方法,目前PI 控制、PR 控制、无差拍控制、重复控制被广泛应用于APF 电流环中,文献[9-13]讲述了无差拍及重复控制器的电流环。文献[14]提出PI+重复控制对三相四桥臂有源电力滤波器进行研究,提高了系统的响应速度与精度。三电平3D-SVPWM 控制方法近年得到学者的大力研究,文献[15]得到了更为简化的三电平控制策略,但是仍然存在优化空间;文献[16]针对两电平简化控制算法进行研究,给三电平优化提供了思路。
针对APF 电流环控制策略,因传统无差拍控制策略动态性能好但控制精度差,重复控制动态性能差但控制精度好,两者结合可有效解决单独运用存在的缺陷,电流环采用无差拍重复控制改善控制效果。针对传统三电平3D-SVPWM 调制过程繁杂,提出将三电平空间矢量分解为两电平结构,进一步利用简化的两电平控制策略进行脉宽调制,提高系统效率。
1 四桥臂三电平APF系统
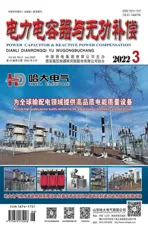
三相四线制APF 的主电路见图1。
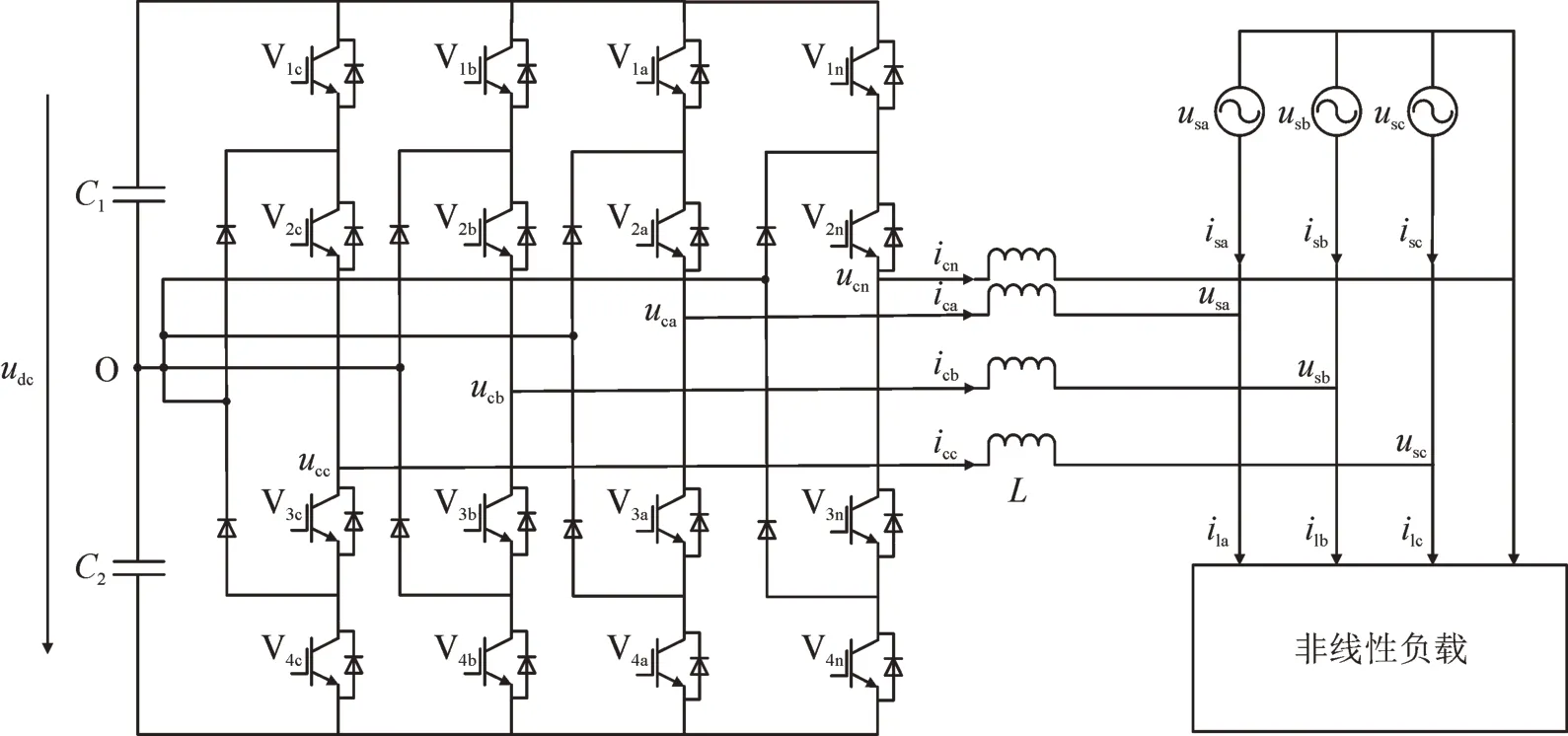
图1 三电平四桥臂有源滤波器电路图Fig.1 Circuit diagram of three⁃level four bridge APF
图中,usa、usb、usc为系统电源电压;uca、ucb、ucc、ucn为APF 逆变器的输出电压;isa、isb、isc为三相电源电流;ila、ilb、ilc为负载电流;ica、icb、icc、icn为逆变器产生的补偿电流;L为有源滤波器的连接电感。
根据APF 主电路,理想状态(上下电容无电压差)可得系统方程组为

式中,Sa、Sb、Sc、Sn分别为A、B、C、N 相桥臂的导通状态。

式中,k为a、b、c、n。
当状态为1 时,k相的4 个开关管从上至下为开开关关,也可表示为p,输出为udc/2 ;状态为0时,k相的4 个开关管从上至下为关开开关,也可表示为o,输出为0;状态为-1 时,k相的4 个开关管从上至下为关关开开,也可表示为n,输出为-udc/2。则拥有4 条桥臂的电路共有34=81 种开关状态。在四桥臂电路中,开关状态为1110 时候,abc 3 条桥臂输出电压均为udc/2,n桥臂为0,则此时una=unb=unc=udc/2。同理此时其余的80 个开关状态都有对应的逆变器输出电压。
2 APF控制策略
在有源滤波器中,常采用基于瞬时无功功率理论的ip-iq法来检测电流谐波,重复控制是对周期性信号实现无静差跟踪的一种方法。有源滤波器的原理框图见图2。

图2 有源滤波器系统的原理框图Fig.2 Principle block diagram of APF
2.1 谐波电流检测
p-q谐波电流检测算法应用场景有限,仅适合理想电网电压状态下。当电网电压不对称的时候,检测的结果会影响到补偿效果[7]。因此当电网出现不对称畸变时候,常采取ip-iq谐波检测法,其方法是通过锁相环得到电压相位产生正余弦函数[7]。经低通滤波器得到电源电流中基波分量对应的有功及无功直流分量,再通过反克拉克变换计算得到abc 坐标系下的谐波电流。
ip-iq谐波电流分量检测法原理见图3。
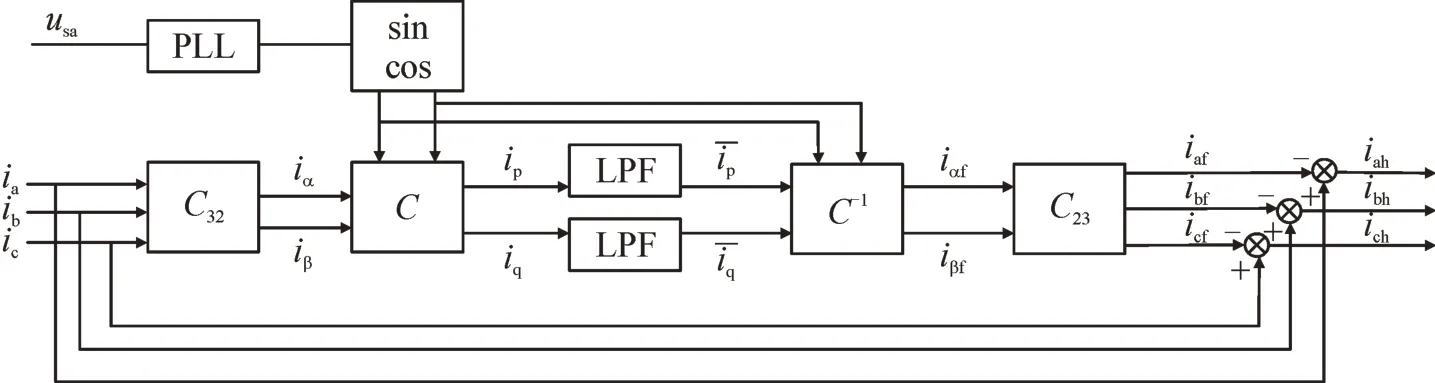
图3 ip⁃iq谐波检测法原理图Fig.3 Principle diagram of ip⁃iq harmonic detection method
2.2 内置重复控制器的无差拍控制策略
传统无差拍控制是采样控制系统的一种控制方式,电压指令信号通过电路参数和电流预测方法获取,因此对给定信号的响应速度特别快[11]。但是无差拍控制需要相对应的预测控制策略,否则控制精度无法保证,对干扰鲁棒性较差,且传统无差拍控制其实是一种差拍控制。
理想重复控制可以对小于一半采样频率的谐波进行无差跟踪,鲁棒性好,与此同时其前向通道上存在一个周期性延时环节,这也就使得重复控制动态响应较差。将传统无差拍控制与重复控制两者结合可以解决各自单独运用存在的问题,所以在电流环中可以采用无差拍重复控制来提高控制精度与响应速度,见图4。

图4 内置重复控制器的无差拍控制原理图Fig.4 Block diagram of deadbeat control with plug⁃in repetitive controller
首先使用Clark 变换矩阵对式(1)中电流进行解耦。为了保证系统的稳定,设置低通滤波器Q(z)并与比例环节并联,S(z)为补偿器,可以进行相位和幅值补偿,不考虑GPWM(z)的延时,此处等效为单位1,G0(z)为主电路传递函数。
为了对控制系统的相位和幅值进行补偿,令:

式中:Kr为重复控制器的增益;zk为引入超前环节传递函数[14]。
此时整个系统闭环传递函数为

1)Q(z)确定方法。
Kr影响系统的稳定性与响应速度,Kr满足稳定性的可控范围越大,对系统的响应速度越友好。而Q(z)可以改变的稳定区域,为了方便控制,使用低通滤波器,公式为

式中,a0、ai为加权系数,该滤波器不存在相位偏移,选择合适的Q(z)对Kr稳定域有好处。
图5给出了低通滤波器Q(z)的对应| |1/Q(z) 频率特性,| 1 /Q(z) |的数值越大对Kr稳定域越友好,选择:

图5 低通滤波器频率特性Fig.5 The Bode diagram of the low⁃pass filter
2)Kr的取值。
考虑到采样延时与脉宽调制延时,相位补偿因子取2,即zk取值z2。当系统稳定时,系统传递函数的特征方程1+(1+GRE(z))∙G0(z)∙L/Ts=0 的根要在单位圆内,令G(z)为未引入重复控制时系统的闭环传递函数,则整理得到公式为

将z=ejωTs代入整理得到

利用不同Kr的向量轨迹图,确定Kr取值范围,曲线处于单位圆内时系统稳定,本文取值0.5,见图6。

图6 系统稳定性轨迹图Fig.6 Trajectory of system stability
3 三电平3D-SVPWM调制策略研究
3.1 三电平空间电压矢量分布
将三电平81 个空间电压矢量从abc 坐标系放入αβγ 坐标系下下。
C的公式为

可得到81 个对应的电压矢量,将其放入空间坐标系下可以得到图7 所示的电压矢量分布图。
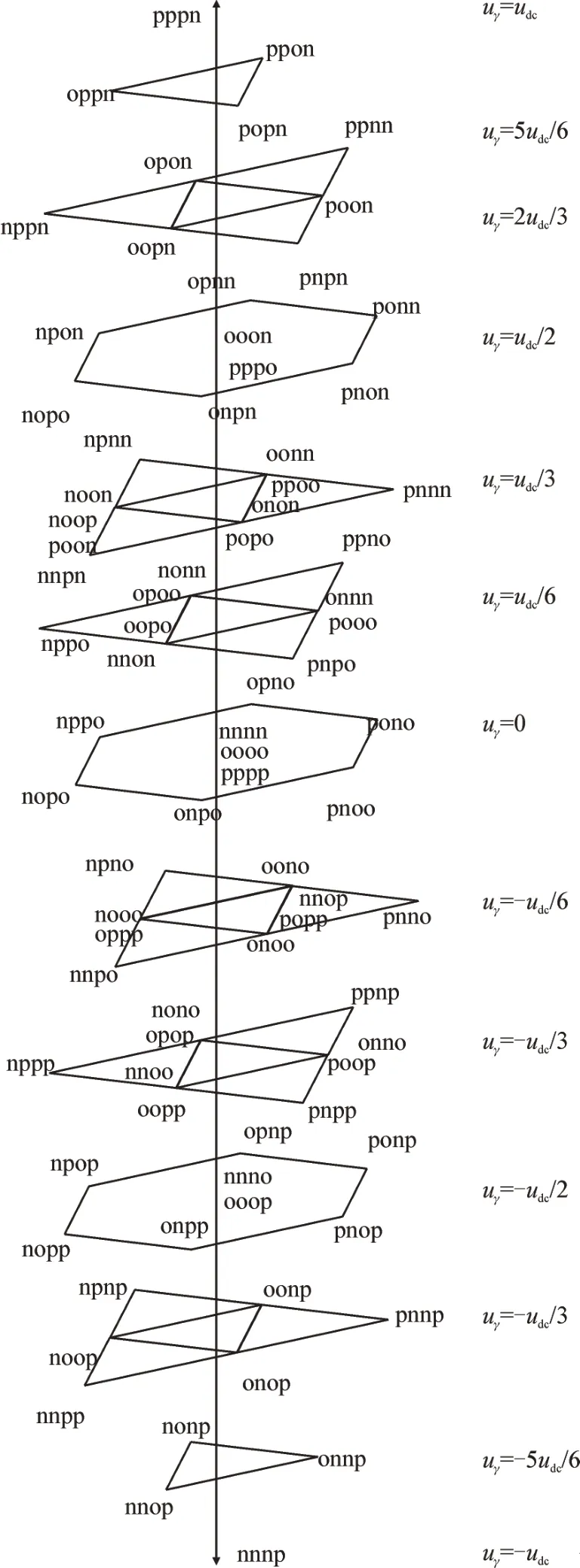
图7 三电平电压矢量分布图Fig.7 Spatial distribution of three⁃level voltage vectors
3.2 两电平空间电压矢量分布
在简单的两电平结构中,每条桥臂只有两种状态,所以共有16 种开关状态,使用公式3.1 变换,将其放入空间坐标系下,得到图8 所示的空间分布图。
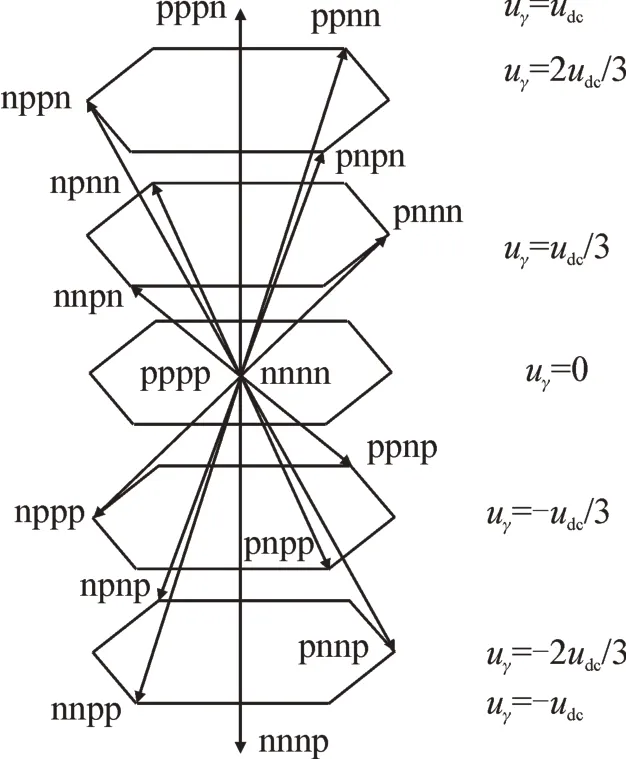
图8 两电平电压矢量分布图Fig.8 Spatial distribution of two⁃level voltage vectors
3.3 三电平分解为两电平结构
现将三电平空间矢量放入αβ平面坐标系下,得到如图9 所示的电压矢量投影和分解图。

图9 电压矢量投影和分解Fig.9 Projection and decomposition of voltage vectors
图9(a)中的x表示p、o、n,并且由图9(b)可见,按照图中的A、B、C、D、E、F 为中心点,可将三电平空间结构分为6 个互有重叠的电平结构[15]。取A为中心的1 区域分析,将1 区域中的空间电压矢量取出,可以看到,其可由两个两电平结构组合而成,对称平面为uγ= -udc/12 。继续分析剩余5 个区域,得到1、3、5 区域平面关于uγ= -udc/12 对称,2、4、6 区域平面关于uγ=udc/12 对称。
为了将其完全分解为12 个独立的两电平结构,先按照如图9(b)虚线所示的方法将参考矢量分为1~6 区域,再经过与该区域的对称平面比较,得到1~12 更详细的区域划分,见图10。

图10 各区域空间矢量分布Fig.10 Distribution of space vectors in each region
3.4 参考电压矢量平移
在对空间电压参考矢量进行划分后,将其平移到两电平结构中心坐标点,得到新的参考电压。
1)在大区域1~6 中,Vα、Vβ变化为,由下边公式转换得到。
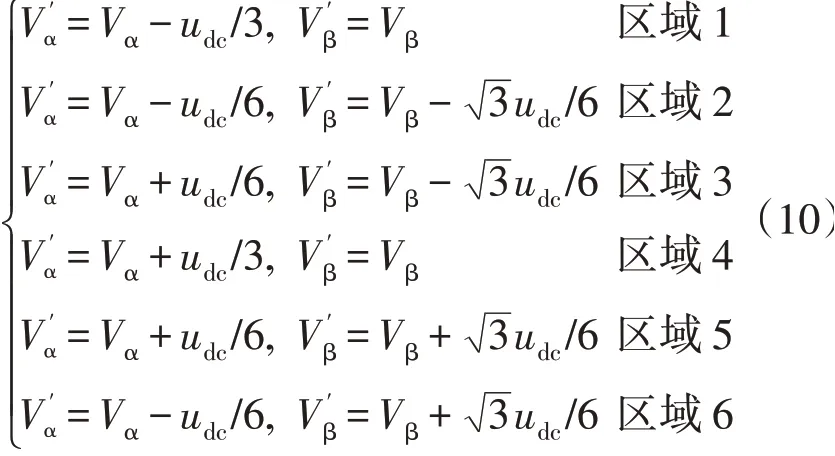
2)确定大区域1~6,再进行上下区域划分后,Vγ变化为由如下公式转换得到。
在区域1、3、5 中时候

在区域2、4、6 中时候

在确定好新的空间电压参考矢量后,再进行两电平的调制策略进行运算。
3.5 等效性分析
以1 区为例分析,根据秒伏特性,有


式中5 个矢量均为分解得到的两电平结构中的矢量且T1+T2+T3+T4+T5=Ts。由式(13)与(14)得

其中叠加矢量Vonnn为三电平结构中的空间矢量,且与此时Vnnnn、Vpnnn、Vpnnp、Vppnp和Vpppp合成后的空间矢量其满足Vonnn=Vnnnn+Vonnn、Vpnnn=Vpnnn+Vonnn、Vpnno=Vpnnp+Vonnn、Vpono=Vppnp+Vonnn和Vpooo=Vpppp+Vonnn,均为三电平矢量空间中的基本矢量,则此时式(3.7)就变成式(3.8)。

其他区域也可以同样推理得到,由此可知分解后的三电平矢量仍然满足分解前的秒伏特性,策略具有可行性。
4 简化两电平脉宽调制控制策略
传统的两电平调制策略计算繁杂,在追求实时性的场合,严重影响效率。因此利用一种简化两电平脉宽调制控制策略来简化其计算过程。文献[16]中基于零序电压的脉宽调制法,提到的先求出N 桥臂占空比,再根据三相参考电压求出其余桥臂占空比的思想可以在此处作为参考,本节将对简化的两电平3D-SVPWM控制策略进行研究。
举例ucan>0>ucbn>uccn,非零矢量的作用时间为(ucan-uccn)∙Ts/udc,即(max(ucan,ucbn,uccn,0)-min(ucan,ucbn,uccn,0))∙Ts/udc,将nnnn和pppp两个零矢量的作用时间进行平均分配得到两者的导通时间为[Ts-(max(ucan,ucbn,uccn,0)-min(ucan,ucbn,uccn,0))∙Ts/udc]/2,则可知N桥臂的导通时间为[Ts-(max(ucan,ucbn,uccn,0)+min(ucan,ucbn,uccn,0))∙Ts/udc]/2。在得到N 桥臂的占空比DN之后,其余桥臂的占空比为DA=ucan/udc+DN、DB=ucbn/udc+DN及DC=uccn/udc+DN。
将上述内容中整理可得各个桥臂占空比为式(17)
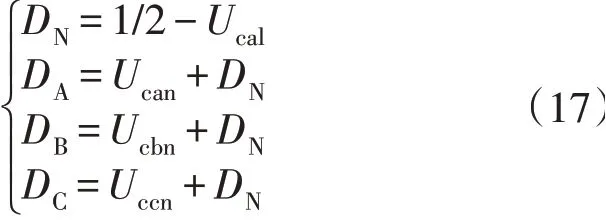
其中Ucan,Ucbn,Uccn为ucan,ucbn,uccn在udc下的标幺值,DA,DB,DC,DN为以Ts标幺的各桥臂占空比,Ucal=(max(Ucan,Ucbn,Uccn,0)+min(Ucan,Ucbn,Uccn,0))/2。
简化脉宽调制策略得到了两电平结构下的桥臂通断时间,在两电平结构下只有p 与n 两种开关状态,而三电平有p,o与n三种开关状态。
由3.5 节分析可知,取参考矢量区域中心坐标为起始状态,以1 区域上半区为例,其中心坐标为onnn,则桥臂初试状态择取onnn,在达到占空比时间后,o变为p,n变为o。
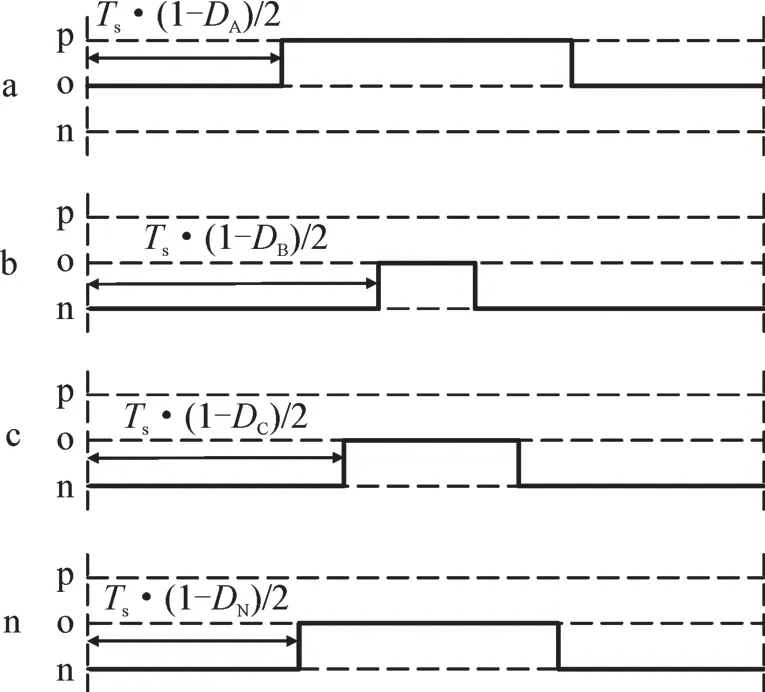
图11 空间矢量作用次序图Fig.11 Sequence of vector action
5 仿真验证
在Matlab 下建立仿真模型,具体参数见表1。

表1 仿真参数Table 1 Simulation parameters
仿真结果如下图所示。

图12 不平衡负载电流Fig.12 Unbalanced load current
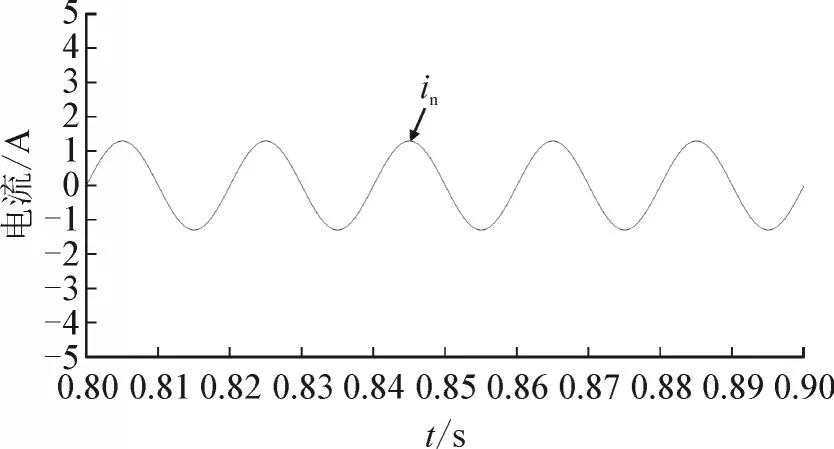
图13 补偿前中线电流Fig.13 Neutral current before compensation

图14 传统无差拍控制电流补偿效果Fig.14 Current compensation of traditional deadbeat control

图17 电源电流FFT分析图Fig.17 FFT analysis of source current
结果显示,使用传统无差拍控制的补偿效果较差,补偿后的A 相电源电流仍然存在明显畸变;经改进控制策略补偿后的三相电源电流变为对称电流且无明显畸变,中线电流几乎为0,补偿效果较好,证实了所提改进控制策略具有可行性。
从FFT 分析中可以发现补偿前的A 相总谐波畸变率(THD)达到了21.60%,采用传统无差拍控制的电流环补偿效果较差,补偿后的谐波畸变率仍有8.49%,不能满足入网需求,采用改进控制策略的补偿效果很好,补偿后的谐波畸变率很低,仅有2.68%,极大地提高了电源电流的质量,达到了国家的标准。
6 结语
本文采用无差拍重复控制策略保证电流环的响应速度与控制精度,有很好的补偿效果,并提出将三电平空间矢量分解为两电平结构,进一步利用简化的两电平控制策略进行脉宽调制,提高了APF系统效率。
该控制策略是建立在电容为理想状况下,即上下电容无电压差,实际情况下上下电容是存在电压差的,所以控制策略有待进一步研究优化。