基于无人机影像数据的三维景观图制作研究
2022-06-19李燕燕
李燕燕
摘要:城中村复合目标自动高精度三维重建是城市三维重建以及城中村变化监测的重要环节,而典型城中村区域通常是高、低不同的建筑物并存,房屋比较密集,从而影响了目标三维模型的精度。针对这一问题,本文提出一种利用无人机序列影像和POS数据自动生成TIN点云模型、格网DSM和DOM的方法,并通过DOM与DSM的叠加,制作出该研究区的城中村三维数字模型,验证了利用无人机数据进行城中村三维模型的有效性。此外,通过比较不同情况下三维模型间的差异,分析格网DSM的精度与点云的提取密度、点云过滤和格网尺寸的关系。
关键词:三维建模 无人机 DSM 城中村 点云
近年来,城市建筑物等目标的空间信息的获取技术得到了极大的发展,有了越来越多的空间信息的获取手段,如GPS、摄影测量、遥感、三维激光扫描、干涉雷达技术等[1],但无论是LiDAR,还是传统的摄影测量手段,获取数据所需花费的费用都很高,特别是当需要进行重复观测时所花费的费用将更高。而无人飞行器(UAV)的出现,其以机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短等优点,很好地解决了上述难题。
DSM是一种包含地表多种信息的地表三维模型,在研究地表信息、城市三维建模、变化监测以及辅助其他手段进行其他的应用等方面有着重要的作用。而无人机航空摄影测量作为一种新型的航测手段,相较于传统航测,优点比较突出,成本费用较低[2]。但是到目前为止,无人机数据的处理还不太成熟,特别是应用于城中村DSM、DOM以及三维模型的建立方面。具体问题在于:典型城中村区域通常是高低不同的建筑物并存,大多数房屋比较密集,这给影像匹配带来了困难。因此,本文利用河北某地区的小区域内的无人机航摄数据,研究如何利用无人机航摄数据生成城中村的DSM,最后进行实验验证,并对结果进行分析和精度评价,希望能为后续的相关研究提供一定的基础。
1数据获取与处理
1.1 无人机数据及研究区概况
本次实验所用的数据是河北某市的无人机航摄数据,该数据是使用固定翼无人机拍摄的,平均地面采样距离(GSD)是6.11712cm/像素。航向和旁向重叠度分别是65%和35%。POS数据中的外方位元素是隔片记录,由于保密政策,本次使用的POS数据采用独立坐标系。本研究区有效使用了11张影像,影像的存储格式为JPG,是真彩色影像。
无人机数据覆盖的区域位于河北某市城中村,实验区内房屋密布,主要的人工设施有道路、普通居民住宅、高层的商业用楼、大型的体育场、操场、广场,此外实验区还有建筑物密集的城中村及遍布整个实验区的零星的植被,实验区的还存在形状奇特的建筑物,情况相当复杂。
1.2 无人机数据及研究区概况
本次实验使用Pix4Dmapper生成较高精度的DSM和DOM,进而利用ArcGIS制作该区域的三维景观图。主要包括以下步骤:(1)数据预处理:包括POS数据的存储格式编辑及内方位元素的计算。(2)初步处理:包括识别和校正相机模型、完成影像间的相对定位及区域网平差。(3)空三加密:提取点云和过滤平滑点云。(4)生成数字表面模型和数字正射影像:包括生成数字表面模型和影像的正射纠正及拼接[3]。
1.2.1 空三加密
在Pix4Dmapper中,航摄数据经过初步处理,就完成了内定向、相对定向和绝对定向,像片的正确位置就已经纠正过来了,对应的地面点的坐标就可以量测计算出来了,下面就可以进行空三加密了。该软件的空三加密包括点云加密、点云过滤和平滑3个主要的过程,3个过程都是为了提取到质量较好的点云数据,为后续生成数字表面模型做准备[4]。
经过合适的点云加密模式加密的点云,在密度方面已经可以满足生成数字表面模型的需求了,但是由于影像自身和软件的原因,这些点云中不可避免地存在着异常点,这需要对加密的点云进行过滤降噪。Pix4Dmapper中对于点云的过滤主要是通过改变噪波過滤的半径来实现的,不同的点云过滤半径会得到不同的结果,一般来说,半径越大,过滤掉的点越多,丢失的表面特征也越多。虽然点云经过过滤去除了异常点,也在软件中生成了一个数字表面,但是这时的表面是不平滑的,甚至某些地物的表面特征发生了改变(如建筑物的顶部变得非常尖锐),这就需要对这个表面进行平滑,这里软件提供了3种平滑模式(sharp、smooth和medium)来改善这种情况。sharp模式可以保留更多的转角、边缘等特征,smooth模式就是平滑整个表面,medium是以上两者的综合。为了更好地保留实验所得的点云数据和保证地物表面拥有更多的特征,本次实验采用点云过滤半径为10(该数值为软件提供的默认值)、平滑模式为sharp。
1.2.2 DSM和DOM生成
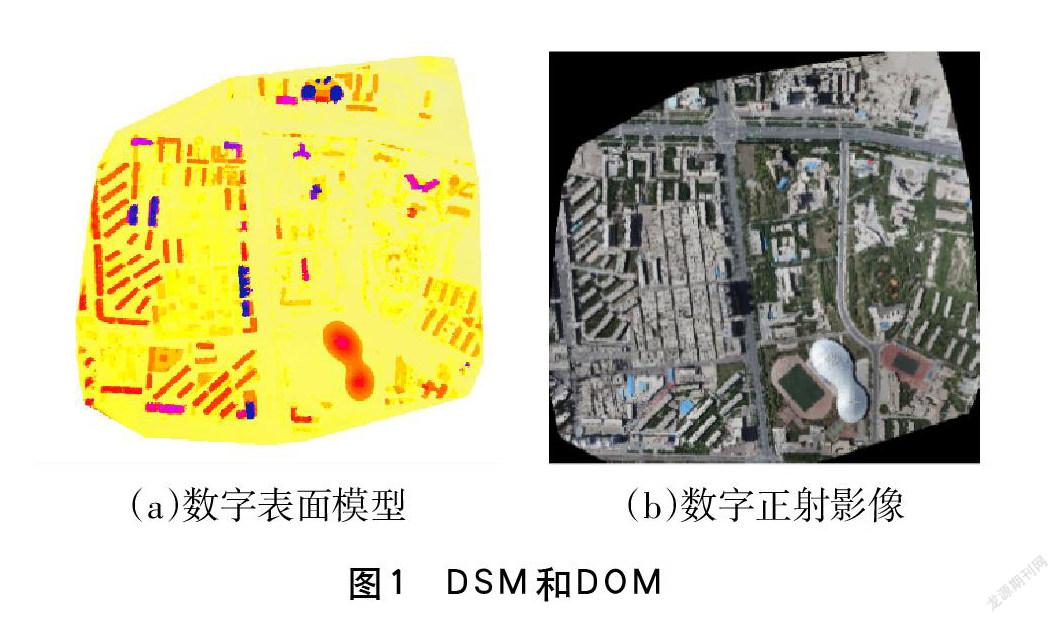
数字表面模型的生成是基于点云加密得到的点云数据来完成的,本次实验使用的软件生成的DSM是格网DSM,它的精度主要受格网大小影响,这一点在随后的精度分析中将会重点来说明。由于考虑到计算的速度,因此软件中生成的DSM的实际过程是:先分块生成各个小块的DSM,然后再将各个小块镶嵌拼接生成大幅的DSM,这样做的好处就是可以加快计算的速度,节省时间[5]。至于数字正射影像的生成,就是基于先前生成的DSM来完成了,与常见的数字摄影测量软件一样,该软件也可以进行正射影像的镶嵌和拼接线编辑。只是有一点不同于其他的软件,这里使用的是DSM进行正射纠正,而不是常见的DEM,所以这里生成的数字正射影像实际上是真数字正射影像(T-DOM),相比于传统的DOM纠正的质量更好,也更精确一些,图1为最终的所得产品。
2 实验结果及精度分析
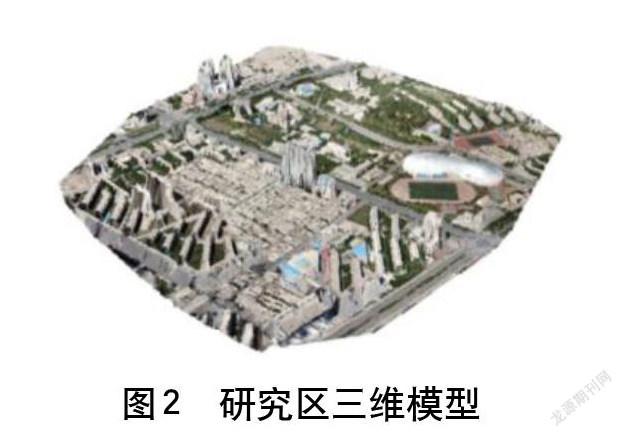
图2是在ArcScene中,在实验所得的DSM上添加实验所得的DOM作为纹理所生成的三维图,目视观察,实验所得DSM结果与实际地表之间还是十分吻合的,它们的纹理基本一致,这也就是说明实验结果还是不错的。584622D3-2AEC-4822-BBA9-FD7A6496236D
由于本次实验的数据采用的是独立坐标系,无法对实验的结果进行具体的数据精度检验,因此开展了以下分析,即分析了影响实验结果DSM精度的几个因素:(1)点云过滤对最终生成的DSM的影响;(2)格网大小对DSM、DOM精度的影响。
2.1 点云过滤对最终生成的DSM的影响
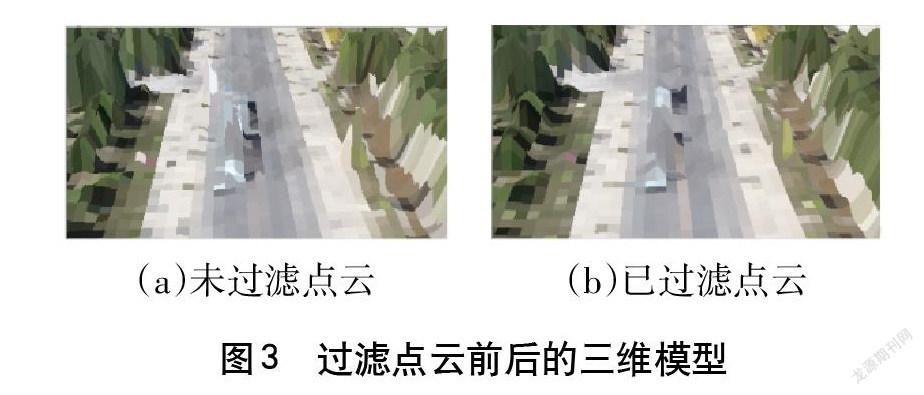
图3中的(a)是经过过滤的点云生成的DSM,(b)则是未过滤的点云所生成的DSM。经过对比两幅图像的细节,发现它们在大的方面相差不大,只是在细节方面存在一些差异。这两幅图是在同一区域中,两幅图中所在的区域都是在一条道路上,由于未知的原因导致在该道路上存在有误差点,使得本该平整的路面变得凹凸不平。对比过滤前后的图像发现,虽然过滤后,该公路上仍然是凹凸不平的,但是比起过滤前有了很大的改善,起伏减小了,但是没有完全消除,这可能是过滤条件选择不合理导致的。另外,道路两旁的树木在过滤后变得平滑、柔和,而在过滤前这些树木显得十分生硬、尖锐。由此,可以确定点云过滤与最终生成的DSM的精度有一定的关系,经过点云过滤后,对于DSM的精度有一定的改善作用[6]。
2.2 格网大小对DSM、DOM精度的影响
分析格网大小为10cm和100cm时生成的点云模型情况,发现:在较小的格网尺寸中点云十分密集,几乎看不到点,物体的表面轮廓十分清晰,但是在较大的格网尺寸下已经完全可以看到排列整齐有序的点云了。
结合图4,同一区域在不同的格网尺寸上有不同的结果。例如:在正射影像中可以看到操场上有6个球门,在(a)图中这6个球门比较矮小,而在(b)图中则比较高大;再比较两幅图中的树木,发现(a)图中的树木比(b)图中的也高大了不少。但是如果详细地比较两幅影像的话,肯定是(b)图更好一些,首先,根据真实情况,球门一般都是只有门柱才是最高的,其余部分是球网,不可能出现(a)图中如此高大的实体;其次,(b)图中的树木也更真实一些,因为它更符合一个常识问题,即树木一般是呈伞形生长的,而不像(a)图中的那样几乎就是柱形的。因此,可以得出结论:格网的尺寸确实对DSM的精度有直接的影响,而且格网的尺寸越小,格网DSM的精度也越高。
3 结语
本文通过对无人机数据利用Pix4Dmapper数字摄影测量软件生成了城中村点云模型、DSM和DOM,进而利用ArcSence将DSM表面贴上DOM作为纹理,制作三维模型,然后通过比较不同的三维模型和点云模型,分析了影响DSM精度的因素,最后得出以下结论:使用无人机数据生产数字表面模型主要依托于数字摄影测量手段,在理论和方法上都是现实可行的,而获取数字表面模型的关键在于如何通过数字摄影测量的方式获取高精度的点云模型数据;点云模型数据质量的好坏与点云加密的尺度和点云过滤的尺度及平滑模式有着一定的关系,合适的点云加密尺度和过濾方式,可以有效地改善数字表面模型的精度;格网DSM的精度与格网的尺寸有着直接联系。
但本次实验采用的无人机数据由于POS数据保密原因,未生成绝对的立体模型,无法对模型精度进行实际检验,还需要采用适合的方法进行精度检验。此外,特征匹配算法的参数设置过于繁琐,总是需要进行多次的实验才能得到较为理想的匹配结果。因此,有待进一步的改进和研究。
参考文献
[1]赵浚壹.基于深度相机的无人机三维场景重建技术研究[D].桂林:桂林电子科技大学,2021.
[2]詹容若,段亮,罗晓容,等.无人机多点位航拍高分辨率三维数字露头建模[J].西安科技大学学报,2021,41(6):1050-1058.
[3]石础.面向城市三维重建的无人机航拍路径规划方法研究[D].天津:天津理工大学,2021.
[4]刘洋,廖东军,王朝刚,等.无人机近景摄影支持下的古建筑三维建模[J].测绘通报,2020(11):112-115.
[5]席敏哲.基于无人机倾斜影像的精细化三维模型构建及智慧园区应用研究[D].西安:西安科技大学,2020.
[6]周增辉,谢作勤,魏见海,等.无人机三维实景建模技术在路堑边坡地质信息提取中的应用[J].公路,2020,65(1):152-156.584622D3-2AEC-4822-BBA9-FD7A6496236D
