三峡升船机塔柱外观检测方案及其综合评价
2022-06-17许进毕金锋罗先启
许进 毕金锋 罗先启



摘要:为保障三峡升船机塔柱结构安全和升船机的运行维护,需要对塔柱外观变形进行检测。塔柱外观检测受通航、天气和作业条件等诸多因素影响,检测质量和工期难以保障,对检测方案进行科学高效评价和比选非常必要。针对塔柱主要区段结构特点,提出了多种外观检测方案,并采用现场调查和专家投票相结合的方式对每种方案优劣进行综合评价。通过专家打分和现场计算为各指标赋值,运用熵值法对指标进行赋权,形成了主客观结合的综合评价体系。实践表明:通过该综合评价方法优选的方案检测工期比预算缩短18.5%,采集画面总合格率在99.6%以上,可为类似高耸建筑外观检测方案决策提供参考和借鉴。
关 键 词:塔柱; 外观检测; 熵值法; 综合评价; 三峡升船机
中图法分类号: TV698.1
文献标志码: A
DOI:10.16232/j.cnki.1001-4179.2022.05.025
0 引 言
三峡升船机是三峡水利枢纽的永久通航设施之一,主要为3 000 t级客货轮和特种船舶提供快速过坝通道[1],是目前世界上最大的升船机。三峡升船机船厢体塔柱是超静定薄壁钢筋混凝土结构[2],其变形和内部应力受荷载、温度等因素影响,易产生表面裂缝。为保障塔柱结构和运行安全,依据相关监测规范要求,需要对塔柱进行外观检测。由于三峡升船机塔柱高耸、内部中空、结构复杂[3],人工巡视[4]、无人机[5]或爬壁机器人检测[6-9]等手段都难以对塔柱进行全面、安全的检测。无人机检测施工通常运用在独立、开阔空间的建筑物上[10-11],其飞行作业对三峡升船机运行不利。国内外研制的各类爬壁检测机器人也无法适用于结构复杂的混凝土建筑物外观检测[12-14]。此外,三峡坝区阴雨天气较多,光照条件差,对检测质量和施工工期影响较大。在通航运行的同时进行外观检测更需要创新检测方案并对方案进行科学高效的优选。目前已有专家打分[15-16]和熵权法[17-18]等综合评价体系在土木工程施工和水资源利用方案决策中应用,这些评价方法具有一定的主观性和复杂性。为满足三峡升船机塔柱外观检测要求,本文创新性地提出了多种检测方案,运用主客观相结合的方法构建综合评价系统,对检测方案进行科学实用的优选。
1 工程概况
本次检测内容主要是针对高146 m、长120 m的三峡升船机塔、柱、梁外表面进行外观检测,裂缝检测精度要达到0.3 mm。三峡升船机塔柱对称布置在船厢室两侧,塔柱编号及结构如图1所示。两侧塔柱在顶部196 m高程处通过7根横梁和2个平台实现横向连接。升船机船厢最高可提升至175 m高程。工程检测的主要区段如下:① 2号和4号塔柱的内外表面;② 196 m高程处11根横梁及牛腿,两平台下10根次横梁;③ 24根基础大梁和16根绳轮梁;④ 三峡升船机4个塔柱共168根纵梁。本文重点对2号和4号塔柱外侧表面,两塔柱175~196 m高程内侧表面以及196 m高程各横梁、大梁、纵梁和牛腿等位置的检测进行研究。
2 塔柱主要区段检测方案
2.1 2号和4号塔柱外侧表面
塔柱墙体外侧表面积大,受侧风等不利因素影响大,需根据工程实际研制相关设备,创新作业模式。
2.1.1 检测设备
此区段检测主要采用重型爬壁机器人。减小侧风对机器人作业影响的方法有两种:① 在爬壁机器人上安装导向孔,穿入导向索,将导向索上部固定,下端与卷扬机相连,通过张拉导向缆将机器人压紧在塔柱表面,为保持稳定,在机器人前段设置相机支架,固定5部相机进行检测,其单次检测宽度达4~5 m;② 在机器人上安装一对轴流风扇产生负压,保证在侧风条件下机器人紧贴墙壁表面作业,为降低重心,增加附面效应,在其底部安装宽幅相机,机器人单帧检测区域达3 m×3 m。
2.1.2 作业模式
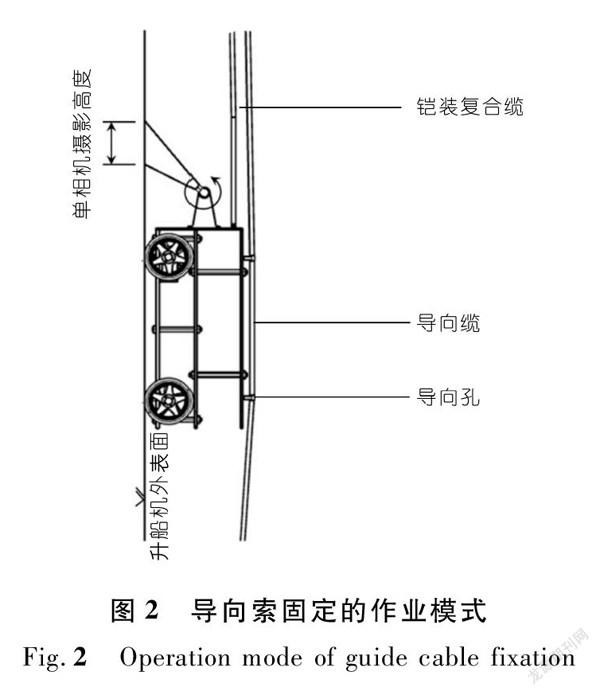
采用导向索固定重型机器人作业时,由设置在外壁底部的卷扬机通过铠装复合缆绕过塔柱顶的定滑轮与机器人相连,牵引机器人上下移动进行检测(见图2)。
采用轴流风扇重型机器人作业时,机器人上部吊耳可连接吊缆或安全绳,通过塔柱顶部布设的吊机实现扇形移动和垂直移动两种作业模式。
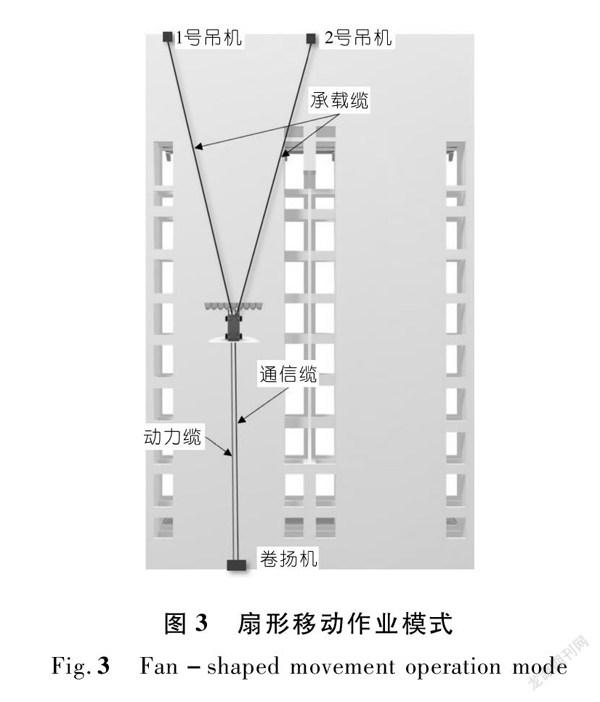
(1) 扇形移动作业模式。
此模式采用机器人左右挂耳连接安全绳,中间挂耳接承载缆,如图3所示。通过程序控制1号和2号吊机缆索收放,牵引机器人在墙面成扇形线移动。通过吊机编码器记录缆索的布放长度来实现机器人定位。考虑缆索的弹性形变带来的误差,需要开发相关算法进行坐标修正。在扇形移动作业模式下,机器人的位置稳定性好,两台吊机无需移动,作业效率较高,但是定位计算较复杂。
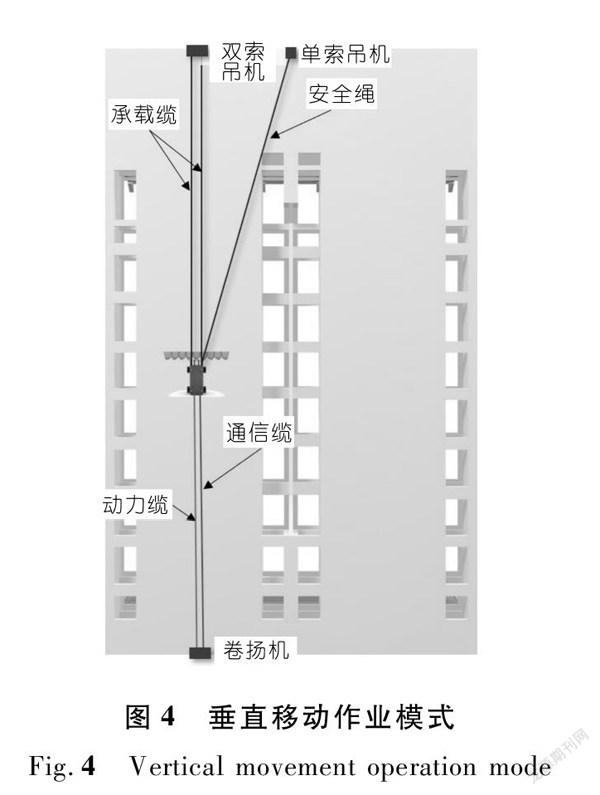
(2) 垂直移动作业模式。
作业时机器人上部用承重缆连接双索吊机,如图4所示,安全绳通过中间吊耳连接单索吊机。机器人位置由双索吊机水平移动和承载缆收放长度来确定。该模式操作可靠,机器人定位简单,但需要不断搬动双缆吊机来改变机器人横向位置,作业劳动强度大,检测施工效率低。
综上,对2号和4号塔柱外侧表面检测共有3种方案:① 导向索固定重型机器人进行牵引检测;② 重型轴流风扇机器人扇形移动模式检测;③ 轴流风扇重型机器人垂直移动模式检测。
2.2 两塔柱175~196 m高程内侧表面
2号及4号塔柱内侧表面结构相对复杂,且检测施工受升船机运行影响较大,其中175~196 m高程段塔柱内侧表面结构更为复杂,如图1所示,其检测难度极大,可选方案采用的检测设备和作业模式总结如下。
2.2.1 检测设备
(1) 轻型爬壁机器人。
此区段不易安装吊机,可采用专用轻型爬壁机器人检测。机器人整体由3K碳纤维管和碳纤维板制造,采用多台无刷电机和无人机推进桨组成推力系统实现爬壁作业,机器人下部装有麦克纳姆轮,可全向移动。爬壁機器人垂直行程大于140 m,携带轻型检测相机,单帧检测区域1.2 m×1.2 m。
(2) 液压抬升机。
在垂直式液压抬升机作业平台设置检测设备,通过抬升机升降对175~196 m高程塔柱内侧表面进行检测。液压抬升机底座宽1.1 m,可通过船厢两侧甲板最窄处,垂直抬升高度18 m,能满足检测要求。该方案单帧检测区域2.5 m×2.5 m。
(3) 检测桁架车。
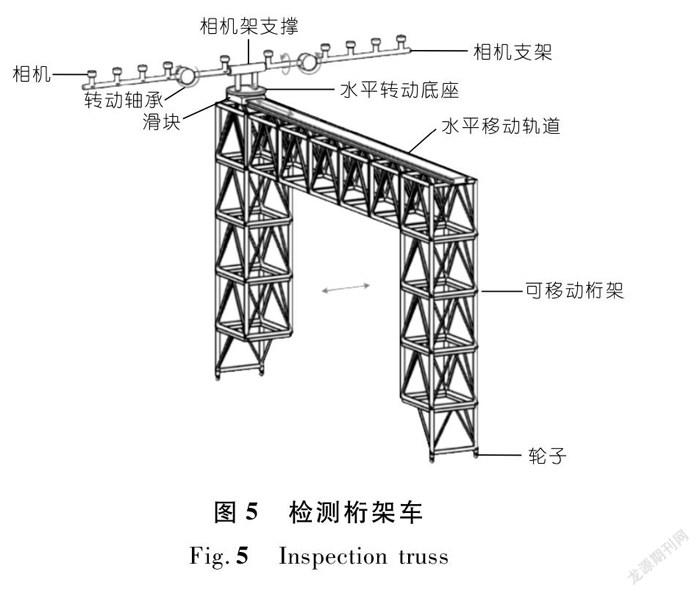
检测桁架车跨设在船厢两侧甲板,由平面可移动桁架、滑行轨道、相机组支架以及其他辅助设备构成,桁架能在船厢甲板自由移动,相机的滑动与转向可通过人工牵引或电机驱动来控制,如图5所示。桁架车高18 m,宽20 m。相机组支架可安装10部相机,检测宽度约20 m。
2.2.2 作业模式
轻型爬壁机器人通过人工遥控自行在墙壁行走,机器人施工中全程系安全绳。机器人通过4组电机編码组成的里程计实时记录机器人的位置坐标,控制系统通过换算获得图像绝对坐标值。
运用液压抬升机检测时,待船厢升至175 m高程后,在甲板上抬升载有检测相机的作业平台从下至上依次检测。检测时先对相机进行基准标定,系统将抬升机的上升速度换算成采集图像坐标增量,并对每张图像自动标定。完成一段位置测量后再由人工推运抬升机进入下一位置继续测量,每次检测宽度2~3 m。
运用桁架车检测时,将船厢提升至157 m高程,在桁架车顶端固定好相机后借助升船机上升移动对墙面进行检测(见图6)。
2.3 196 m高程各类梁及牛腿
对该区域进行检测的方案有3种。
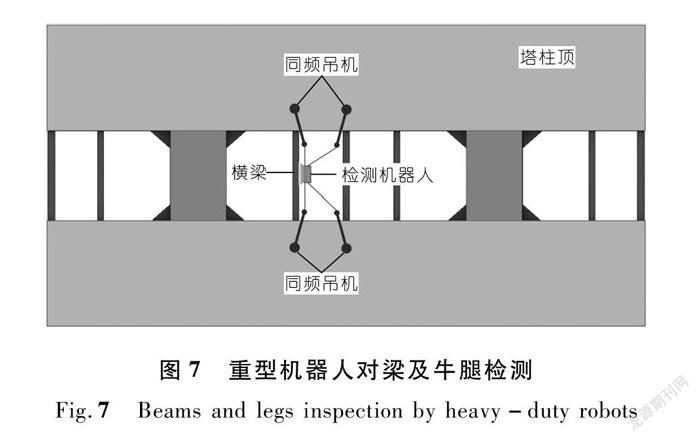
(1) 采用吊机配合轴流风扇重型机器人进行检测。通过位于塔柱顶部平台的4部同频吊机对机器人进行控制,检测时将机器人下放到与横梁或平台下次梁相应的高度,然后通过改变4部吊机的缆绳长度,调整机器人的姿态,使相机正对检测位置,再通过扇形移动作业模式,使机器人沿着梁的纵向移动进行检测,如图7所示。该模式作业单帧检测区域2.0 m×1.5 m。
(2) 采用两台液压抬升机安装简支横梁导轨进行检测。在船厢两侧甲板对应设置两台抬升高度为18 m的垂直抬升机,在抬升机顶部搭设简支梁导轨,在导轨中安装带有检测相机滑轮平台,采用电机或人工牵引滑轮平台对各横梁检测。通过抬升机顶部安装遥控云台相机对各牛腿及大梁进行多角度拍摄,该方案单帧检测区域约2 m×2 m。
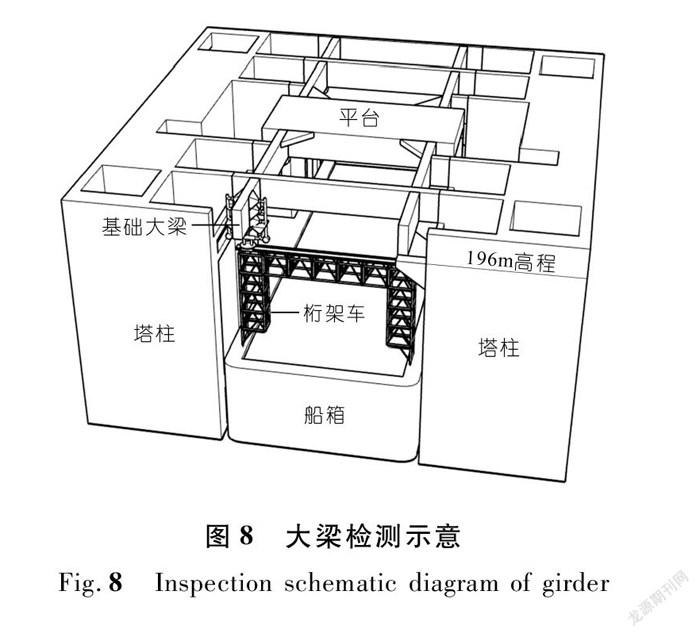
(3) 采用检测桁架车作业,将相机架折叠成“U”形或“L”形,通过移动桁架车或相机架滑块对大梁、横梁和牛腿检测,单帧检测达2.5 m×2.5 m(见图8)。
3 检测方案综合评价
3.1 评价指标
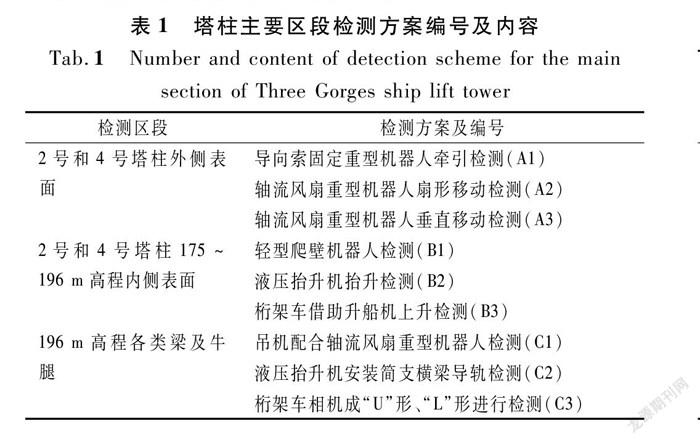
对施工方案评价通常以技术可行性、安全性、进度可控性和成本经济性等作为评价原则,先对3个主要区段各施工方案进行编号(见表1)。
结合工程要求,根据上述评价原则通过现场调查获得可靠性、安全性、进度控制和工期成本施工方案四大类22个评价指标。采用专家打分对指标进行筛选,确定了技术成熟度、施工难度等级、采集画面合格率、单位面积检测耗时、单位面积检测经费、升船机停运时间、对塔柱墙壁损伤比和施工安全性等级8个较全面的关键性指标。
根据指标属性不同,分为正向指标和反向指标。
正向指标包括:① 技术成熟度,是指技术水平、施工流程、配套保障等方面所具有的工程施工实用化程度,取值范围为1~9;② 采集画面合格率,要求检测采集画面分辨率不低于1 000×800,无模糊点;③ 施工安全性,按可能产生事故的几率和可能产生危害的严重程度分级,1级几率最高且程度最严重。
反向指标包括:① 施工难度等级,参照国家关于岗位难度系数等级,分为1~5级,1级难度最低;② 单位面积检测耗时,即区段检测施工所需总时间;③ 单位面积检测经费,即检测总费(检测设备研制费、试验费、安装拆除费、材料费和检测劳务费等)与检测区段面积比值;④ 升船机停运时间,为配合检测施工需要升船机停运的时间;⑤ 对塔柱墙壁损伤比,检测施工对塔柱墙壁造成损伤面积与所检测面积的比值。
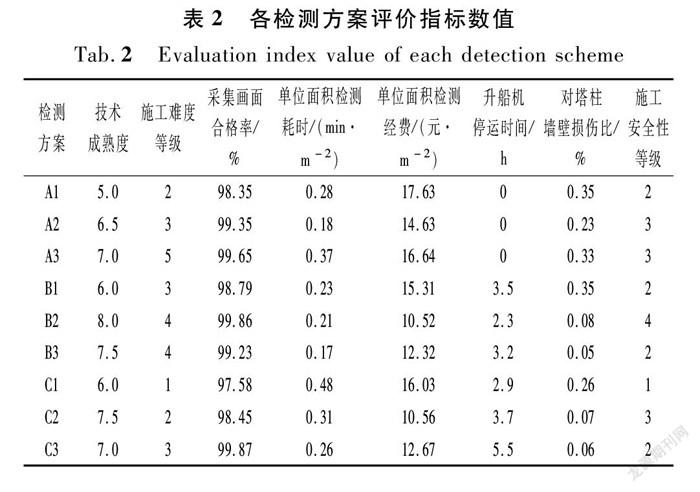
20名专家根据各检测方案内容对技术成熟度、施工难度等级和施工安全性3个关键指标进行打分。同时,考虑不同专家权威性差异,采用模糊优选理论从学历、职称、学术成果、评价实践经验、专业熟练程度等方面衡量专家打分权重[19]。再根据专家评分和其打分权重计算上述3个关键指标数值。对采集画面合格率、单位面积检测耗时、单位面积检测经费、升船机停运时间和对塔柱墙壁损伤比5个关键指标采用多次现场实验记录数据并通过求平均计算获得数值,为运用熵值法赋权做好准备。经计算获得各检测方案评价指标的数值如表2所列。
3.2 熵值评价法
在构建了三峡升船机塔柱外观检测方案评价指标体系后,接着对各评价指标进行赋权。常用的赋权方法主要有主观赋权法和客观赋权法。客观赋权法不受主观判断的影响,是根据客观值的内在联系来计算指标权重,得到的结果更加客观。本文采用客观赋权法中的熵值赋权法[20]进行计算,使评价结果更为准确。以3个重点区域共9种方案的专家评价分值作为样本,对各方案的8个评价指标值进行打分,得到xij。xij表示第i种方案的第j个评价指标值(i=1,2,3…9;j=1,2,3…8),计算步骤如下。
(1) 对原始数据采用极值法进行无量纲化处理,获得无量纲化值x′ij。
对于正向指标:
x′ij=xij-mjMj-mj(1)
对于逆向指标:
x′ij=Mj-xijMj-mj(2)
式中:Mj为xij最大值,mj为xij最小值。
(2) 计算特征贡献率pij,即第j个评价指标下,第i个方案的贡献度。
pij=x′ijni=1xij(3)
(3) 熵值计算。第j项指标的嫡值ej为
ej=-1lnni=1pijln(pij)(4)
(4) 差异性系数计算。第j项指标的差异性系数gj为
gj=1-ej(5)
(5) 确定评价指标的权重wj
wj=gjmi=1gj, j=1,2,3……m(6)
3.3 基于熵值评价法构建综合评价体系
首先对表2中的数据进行无量纲化处理,结果如表3所列。为了数据运算处理有意义,必须消除零,故需对无量纲化后的数据采用公式(7)进行整体平移。
x′ij=x′ij+α(7)
为了不破坏原始数据的内在规律,最大限度地保留原始数据,取α=0.000 1。
依据上述9种方案评价指标无量纲化结果,运用熵值法计算步骤得出各评价指标的熵值、差异性系数及权重,計算结果见表4。
将得到的指标权重wj与第i个被评价方案在第j个评价指标上的特征贡献率相乘得出每个方案各指标评价的综合得分(见表5)。将每一种方案各指标相加求得各方案的综合得分S。综合得分计算公式为
S=mj=1wj×pij(8)
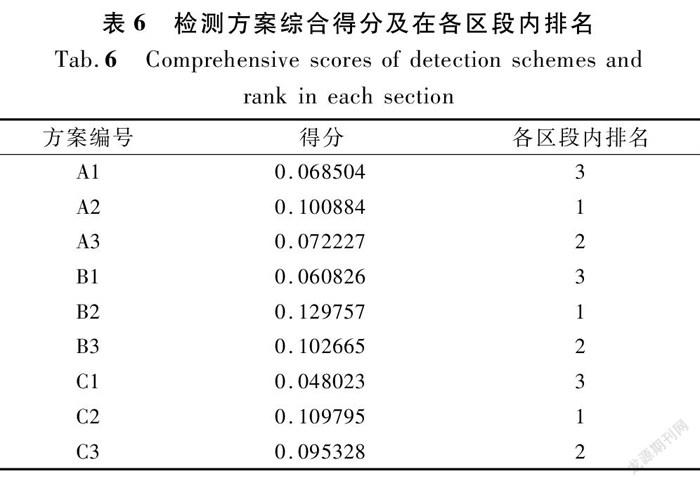
根据公式计算各方案综合得分,从高到低进行排名,获得方案在各区段内的名次(见表6)。
根据各种方案综合得分排名,选出每个区段排名第一的方案作为优选方案:在2号和4号塔柱外侧表面区段检测选择A2方案;2号和4号塔柱175~196 m高程内表面区段检测选择B2方案;196 m高程各梁及牛腿检测选择C2方案。
此外,通过对各优选方案综合得分分析,根据方案在关键指标上的得分异常,进行针对性的调整和修正,使已选方案更加合理。例如A2方案中对塔柱墙壁损伤比得分较低,因此施工时要加强机器人外表面防撞设施,实现对塔柱墙壁的保护;B2方案中施工难度等级得分较低,需要在施工前反复进行设备调试和作业演练,解决难点问题;C2方案要求升船机配合停运时间较长,可结合船厢停航和检修计划合理安排施工时间,以确保检测施工安全高效。
4 结 语
根据综合评价体系得到的最优方案(A2B2C2)已经在三峡升船机塔柱外观检测工程中成功实施。经统计,除去恶劣天气和临时性停工等影响外,主要区段检测工期比预算缩短18.5%,采集画面总合格率控制在99.6%以上,未发生塔柱墙壁损伤,检测经费在合理范围内,施工过程未发生任何安全事故。
参考文献:
[1] 杨红,杨蓉,王悦.浅谈三峡升船机试运安全管理[J].人民黄河,2020,42(增1):224-226.
[2] 马少甫.三峡升船机施工安全控制技术研究与应用[J].电力勘测设计,2020(3):1-6.
[3] 钮新强.三峡升船机结构关键技术研究[D].武汉:华中科技大学,2005.
[4] 陈宁,王娟,董庆广.无人机搭载红外热像仪检测外墙外保温系统缺陷影响因素及案例分析[J].施工技术,2020,49(9):12-15,23.
[5] 梁亚斌,蔡思佳,冯谦,等.基于无人机航拍的武汉天兴洲长江大桥桥索PE外观检测技术[J].大地测量与地球动力学,2019,39(11):1207-1210.
[6] 钟登华,王飞,吴斌平,等.从数字大坝到智慧大坝[J].人民长江,2015,34(10):1-13.
[7] WANG Z,ZHANG K,CHEN Y,et al.A real-time weld line detection for derusting wall-climbing robot using dual cameras[J].Journal of Manufacturing Processes,2017,27:76-86.
[8] 唐东林,袁波,胡琳,等.储罐探伤爬壁机器人全遍历路径规划方法[J]工程设计学报,2018,25(3):253-261.
[9] 舒俊健,王强,何雅颖,等.大型球罐容器焊缝识别与检测爬壁机器人设计[J].热加工工艺,2020,49(11):127-131,135.
[10] 苏琦,刘佰鑫,王权权,等.基于多旋翼无人机的桥梁外观检测技术及工程应用研究[J].预应力技术,2017(5):7-11.
[11] 方留杨,陈华斌,吴晓南,等.基于无人机三维建模技术的桥梁检测方法研究[J].中外公路,2019,39(1):109-113.
[12] UNVER O,SITTI M.Tankbot:A palm-size,tank-like climbing robot using soft elastomer adhesive treads[J].International Journal of Robotics Research,2010,29(14):1761-1777.
[13] LI B,USHIRODA K,YANG L,et al.Wall-climbing robot for non-destructive evaluation using impact-echo and metric learning SVM[J].International Journal of Intelligent Robotics and Applications,2017,1(3):255-270.
[14] 孙烨,李帆,郝淼,等.港口起重机巡检用爬壁机器人研制[J].制造业自动化,2020,42(4):69-72.
[15] 张津,周祥全,程鲁,等.基于循环修正的水资源利用率综合评价:以四川省眉山市彭山区为例[J].人民长江,2018,49(1):65-69.
[16] 葛巍,李定斌,李冀,等.南水北调中线征迁安置风险后果模糊综合评价[J].人民长江,2019,50(1):211-214,219.
[17] 張奥,李云安,张驿,等.基坑支护方案优选中熵权-理想点决策模型研究[J].人民长江,2014,45(增2):213-216.
[18] 张星星,王琴,袁静,等.基于最优综合效益的节水灌溉方案熵权系数评价[J].节水灌溉,2019(4):86-89.
[19] 何群,陈明,徐力群,等.大坝综合评价指标专家主观权重的计算方法[J].人民黄河,2019(增2):67-68,92.
[20] JI Y,HUANG G,SUN W.Risk assessment of hydropower stations through an integrated fuzzy entropy-weight multiple criteria decision making method:a case study of the Xiangxi River[J].Expert Systems with Applications,2015,42(12):5380-5389.
(编辑:胡旭东)
Appearance inspection schemes of Three Gorges ship lift tower and its comprehensive assessment
XU Jin,BI Jinfeng,LUO Xianqi
(School of Naval Architecture,Ocean and Civil Engineering,Shanghai Jiaotong University,Shanghai 200240,China)
Abstract:
To ensure safety of the tower structure and the operation-maintenance of the Three Gorges ship lift,it is necessary to detect the deformation of the tower appearance.Because of the tower appearance inspection is easily affected by many factors such as navigation,weather and working conditions,the inspection quality and construction period are difficult to guarantee.Therefore,it is necessary to carry out scientific and efficient assessment and comparison of the tower appearance inspection scheme.In this paper,according to the structural characteristics of the main sections of the tower,several appearance inspection schemes were proposed,the advantages and disadvantages of various inspection schemes were comprehensively assessed by field investigation and expert voting.Through expert scoring and field experiment calculation,each index was assigned,and the entropy method was used to weight the index,forming a comprehensive assessment system with subjective and objective combination.Practice showed that the scheme optimized by the comprehensive assessment method had high detection quality and short construction period,which can provide reference for the decision-making of the appearance inspection scheme of similar high-rise buildings.
Key words:
tower;appearance inspection;entropy method;comprehensive assessment;Three Gorges ship lift
