全自动运行线路车库门监控系统的研究与设计
2022-06-16李宇麒高振天尹恩华李正东
李宇麒,高振天,尹恩华,李正东
(中船重工海为郑州高科技有限公司,河南 郑州 450015)
0 引言
随着全自动驾驶技术的不断发展,形成了控制中心核心设备、车站控制设备(例:站台门)、轨旁设备、车载设备的四大核心架构[1-4]。为适应全自动驾驶的需求,进一步提高运营效率,越来越多的设备被纳入全自动运行系统[9]。
车辆段/停车场是城市轨道交通中列车检修、日常维护及保养作业的场地[5-6]。车辆段/停车场通常分为停车列检库和洗车库,其中列检库每个股道安装1樘车库门,洗车库两端分别安装1樘车库门,完成诸如轮对检查、融冰除雪以及列车清洗等作业[5]。车库门设置在库房的出入口,作为列车进出的必要屏障,起到防晒、防尘、防雨雪、保暖、隔热等作用[7]。由于列车出车、收车、洗车、维护时,均会经过车库门,其使用频率较高,且对行车安全有着重要的作用,因而一些全自动驾驶线路开始将车辆段的车库门(例如:北京燕房山)也纳入到全自动驾驶系统中[7]。
然而,传统车辆段的电动车库门无法实现远程控制,一般需要人工在就进处操作开/关库门,存在作业效率低、人为主观因素干扰大、开关过程存在安全隐患等问题,无法适应全自动驾驶线路的需求[8-10]。
该文结合全自动驾驶线路的需求,设计了一种全自动车辆段的车库门监控系统。该监控系统分为控制系统和监视系统两部分,二者相对独立。控制系统可以实现自动控制、远程人工控制、本地控制的三级控制功能,门体周围也具有必备的安全防护和报警装置;监视系统可以对各个库门的运行状态和故障进行采集、传输、存储、显示,方便后期排查故障和缩短维修时间。因而,该车库门监控系统安全可靠,满足了全自动驾驶线路对车库门系统的控制和安全需求,有利于提高列车发车频率、降低发车时间间隔,在确保行车安全的同时,提高了运营效率。
1 车库门监控系统组成
该车库门监控系统组成框图如图1所示,可分为监视系统和控制系统。其中控制系统又可分为就地控制器(GDL),中央接口盘(GDC),门体行程检测装置、闭锁固定装置、电机及其传动机构、安全防护装置等;监视系统可分为监视主机软件、门控单元软件等。
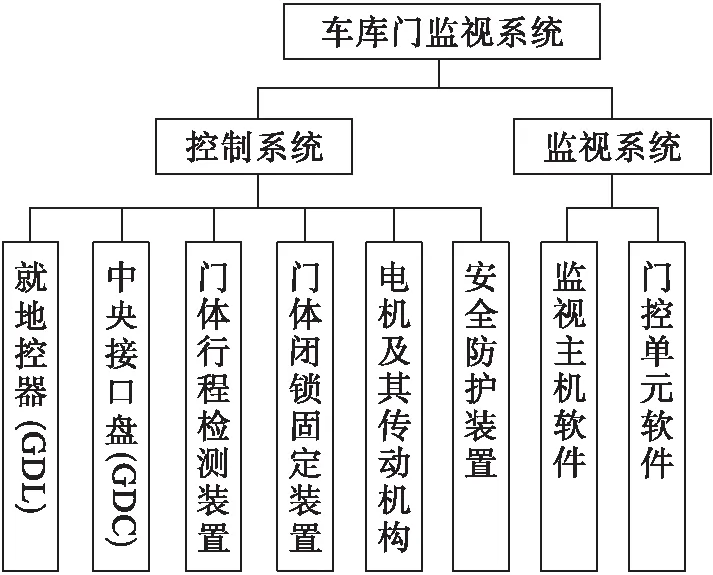
图1 系统组成框图
1.1 车库门控制系统
车库门控制系统的构成原理如图2所示。车库门控制系统主要由总控设备中央接口盘(GDC),分散到各个库门旁的就地控制器(GDL),以及门体上安装的行程检测装置、闭所固定装置、电机及其传动、安全防护装置组成。其中,GDC作为总控设备,通过继电接口实现与外部系统的信息交换,将信号系统或IBP盘发送的控制命令,经优先级控制电路处理后,发送至相应库门的就地控制器。优先级控制电路是车库门系统的重要一环,起到确保三种控制模式可靠切换的作用,并且有效避免了单纯利用软件识别命令优先级的缺点,该内容将会在第3章详细讨论。
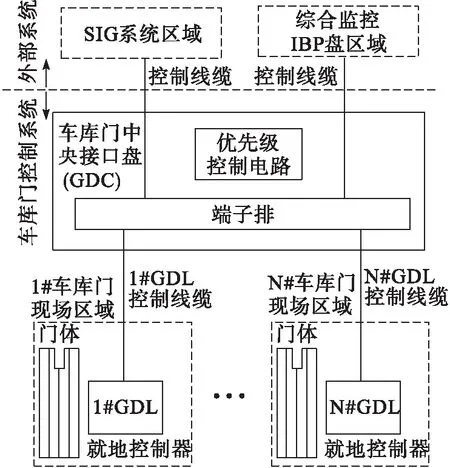
图2 控制系统原理图
就地控制器负责接收命令并具体执行,实现对门体动作的控制、检测、以及相应的安全防护等功能,具体工作流程将在第2章详细论述。
某些必要的状态信息(例如:开到位且闭锁、关到位且闭锁、故障、控制模式等)也需要通过硬线反馈至信号系统或IBP。此时,GDC接收各个GDL反馈回来的信息,汇总反馈至信号系统的接收继电器,或于IBP上的指示灯显示。
1.2 车库门就地控制器(GDL)
车库门就地控制器(GDL)是车库门控制系统的核心,其原理如图3所示。GDL内部主要由电源系统、核心控制器、驱动器、端子排和操作面板组成。
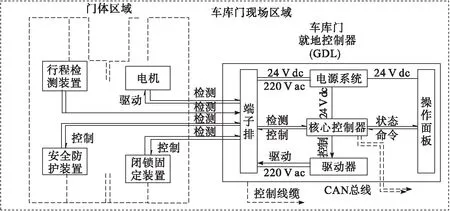
图3 车库门就地控制器原理图
电源系统是整个车库门现场区域的供电来源,其向GDL内部各器件提供所需电能,同时也向门体上的各电气部件供电。核心控制器接收端子排转发的所有检测信号,通过内部微处理器进行逻辑判断,输出控制信号至端子排,并向驱动器发送相应控制命令。驱动器接收到开/关/停止命令后,控制电机进行正转/反转/停止。操作面板用于实现车库门的本地控制模式,并用指示灯显示相应状态。
闭锁固定装置是由电磁铁和检测开关组成的机电结构,其接受核心控制器的控制,并反馈动作信息。在门体运动过程中,核心控制器通过控制继电器闭合电磁铁的供电回路,使其保持吸和,进而拉动锁销解锁;系统出现故障或门体开/关到位时,核心控制器断开电磁铁电源,使其释放并锁定。因而,该装置可以提高库门的紧急停止能力,并防止外力或强风造成门体的晃动。
安全防护装置主要包括多个光电开关组成的防区和声光报警装置,当有障碍物在开/关门过程中触碰防区时,核心控制器会立刻停止电机运动,并锁定闭锁固定装置,实现库门的紧急停止,并识别为系统故障。当障碍物消失时,库门仍可以继续执行当前命令。声光报警器可在系统故障或有探测到障碍时,闪烁并报警,以提示工作人员。
此外,核心控制器可以通过检测电机电流实现进一步的遇障碍物防护。即:当障碍物阻碍门体运动时,电机的载荷变大。当电机电流值显著大于正常值时,核心控制器会判断门体遇阻,并采取相应措施。因而,该车库门就地控制器具备十分完善的安全防护机制。
1.3 车库门监视系统
车库门监视系统如图4所示,其中监视主机软件运行于GDC的工控机内,门控单元软件运行于各GDL的核心控制器内,工控机作为网络上的主机,GDL作为网络上的从机,通过通信线(CAN总线)连接成一个整体,实现主节点与各从节点的间的信息交换。
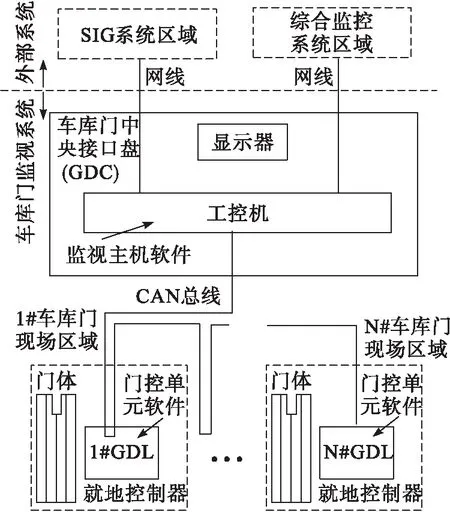
图4 监视系统原理图
监视主机采集各GDL收集到的车库门运行和故障信息,汇总成系统信息,于显示屏上实时显示,并按照时间顺序将相应记录存储于监视主机内,用于后期维护和查询。整个车库门系统的运行和故障信息,可通过网线上传至外部系统。
可见,监视系统与控制系统采用不同的结构和传输通道,因而相对独立,当车库门的监视系统故障时,不影响通过硬线执行的控制系统命令。
2 车库门控制流程分析
车库门系统的控制流程如图5所示。
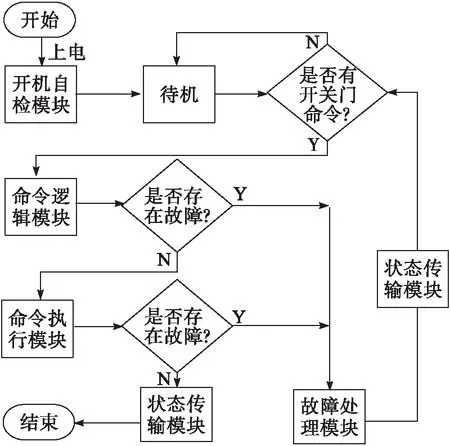
图5 车库门系统控制流程图
系统上电后,GDL进入开机自检模块,确认无误后进入待机模式,等待控制命令。当接收到控制命令后,系统进入命令逻辑模块。该模块主要负责对各种命令进行优先级识别,挑选出优先级最高的命令并判断有无命令冲突。之后,在产生一个有效的命令后,系统进入命令执行模块。该模块用于具体执行开/关/停门命令。故障处理模块通过中断程序,负责实时监控各故障点位,并做出相应处理。最后,状态传输模块会在每次开关门到位后或者每次发生故障时,通过CAN协议,向监视主机发送状态和故障信息。
以开门命令的执行过程为例,对命令执行模块做详细分析,如图6所示。在命令逻辑模块锁存一个有效的开门命令以后,开始进入命令执行模块。首先,声光报警器闪烁并报警,以提示门体即将开门动作。之后,闭锁固定装置解锁。正常情况下,核心控制器接收到反馈的解锁信号,向电机驱动器发送开门命令;若未接收到解锁信号,则判断为解锁故障,并停止门体运动,等待故障处理模块处理。门体一旦开始运动,系统便会使能一个计时器开始计时,以防止门体运动过程中产生不可预知的故障。若门体动作时间远超正常值,则判断为出现系统故障,停止门体动作,并等待故障处理模块处理。门体正常开到位后,核心控制器发送停止命令,闭锁固定装置锁定。若未正常锁定,则判断为锁定故障,等待故障处理模块处理。
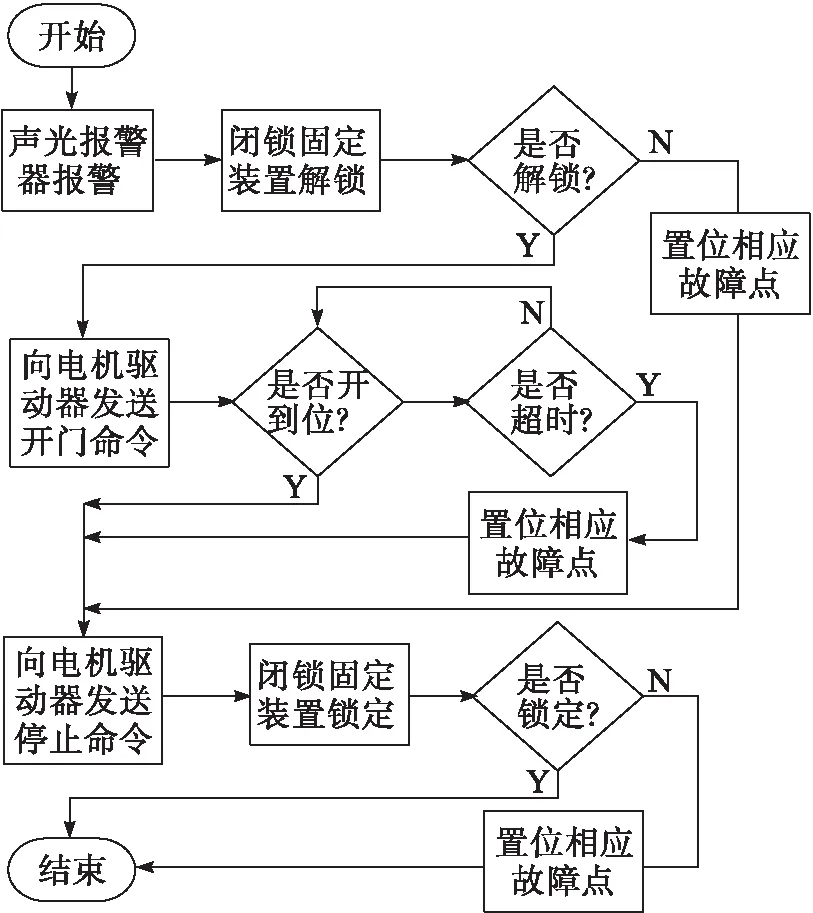
图6 命令执行模块详细流程图
3 车库门优先级控制电路原理
3.1 电路结构
车库门系统的优先级控制电路如图7所示,该电路由安全继电器KA1-KA5,钥匙开关SA1、SA2,按钮SB1,SB2组成。KA1为信号系统的命令发送继电器,当其得电时,即表示发送相应控制命令。IBP盘上的SA1钥匙开关,当其处于工位“1”时,表示允许IBP控制,处于工位“0”时,表示禁止IBP控制;按钮SB1,按下时,表示发送相应IBP控制命令。GDL上的SA2钥匙开关,当其处于工位“1”时,表示允许本地控制,处于工位“0”时,表示禁止本地控制;按钮SB2,按下时,表示发送相应本地控制命令。所有控制命令均需最终触发继电器KA5来实现对车库门的控制。

图7 车库门系统优先级切换电路原理图
3.2 原理分析
其优先级实现分析如下:
(1)全自动运行情况下,SA1、SA2钥匙开关均处于工位“0”,使得其触点1-2、3-4均断开。此时,安全继电器KA2、KA4无法得电,触点自然释放,即:1-2、3-4断开,5-6、7-8接通。因此,只有SIG系统具有控制KA5继电器的通路(1-3-5),此时车库门系统处于与信号系统联动的自动运行状态。
(2)当IBP盘的SA1钥匙开关拨到工位“1”时,SA1的触点1-2、3-4接通,GDC内的安全继电器KA2得电,使其常开触点闭合,常闭触点断开,即:KA2的1-2、3-4接通,5-6、7-8断开,强制关闭了SIG系统控制KA5的命令信号通路。此时,IBP盘具有控制KA5继电器的通路(2-3-5),当按钮SB1按下时,SB1的1-2、3-4接通,GDC内的KA3继电器得电,KA3的1-2、3-4接通,使得KA5继电器得电,GDL即判断识别到了一次开/关门命令。此时,车库门系统处于远程人工控制模式。
(3)当GDL的SA2钥匙开关拨到工位“1”时,SA2的触点1-2、3-4接通,安全继电器KA4得电,KA4的1-2、3-4接通,5-6、7-8断开,强制关闭了SIG系统和IBP盘控制KA5的命令信号通路。此时,只有GDL具有控制KA5继电器的通路(4-5),当按钮SB2按下时,SB2的1-2、3-4接通,使得KA5继电器得电,GDL即判断识别到了一次开/关门命令。此时,车库门系统处于本地控制模式。
(4)综上,车库门系统从硬线上实现了控制模式的优先级(自动运行<远程人工<本地控制),在车库门系统工作在高优先级的控制模式时,低优先级的系统无论是否有误触发信号,均不影响系统的正常工作。且安全继电器的切换简单可靠,极大的提升了系统的安全性、可靠性。
4 实验
该文设计的车库门监控系统实验样机实物图如图8所示。
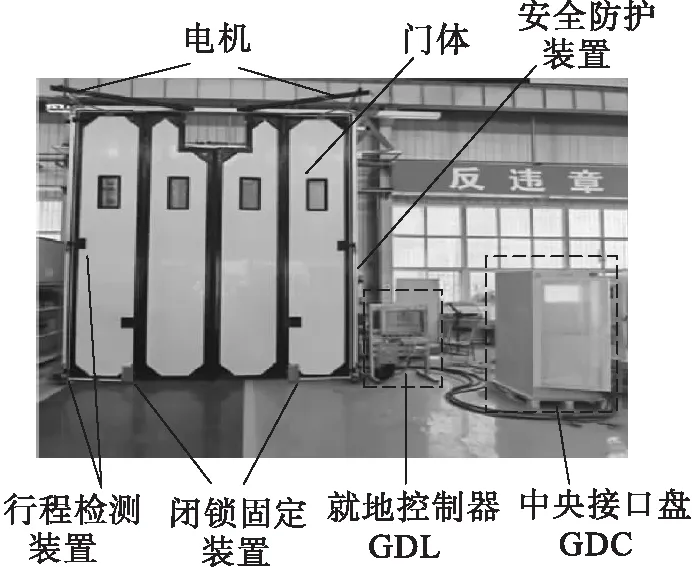
图8 车库门样机实物图
车库门GDL的内部实物图如图9所示。车库监视软件主界面如图10所示,此时14#车库门正处于就地控制模式,相应的点位变成绿色。当门体处于开到位且闭锁状态时,相应序号的门体图标也变为打开状态。
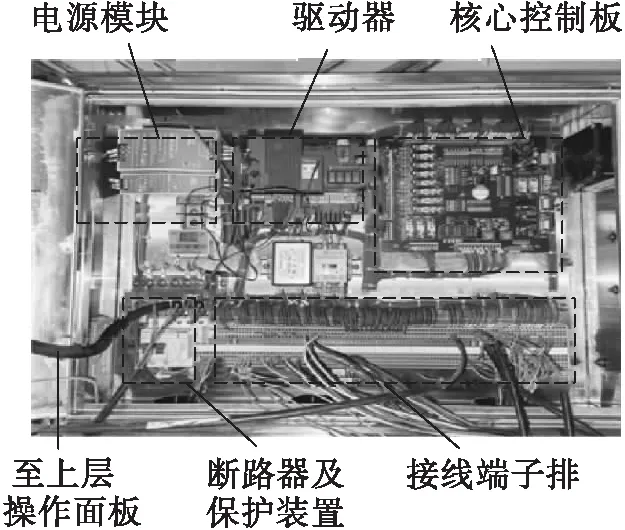
图9 车库门GDL内部实物图
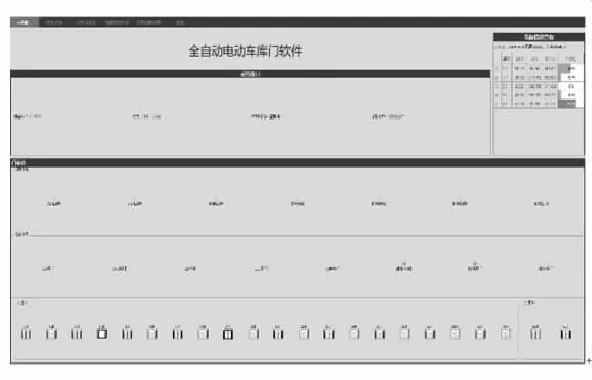
图10 车库门监视软件主界面
当需要查看车库门系统的状态或故障信息时,单击状态栏的“历史记录”,即可弹出图11所示界面。可查询记录分为“操作记录”和“故障记录”两类,通过查询相应记录,即可获取各车库门的运行状态,数据以月份为单位汇总存储。

图11 车库门操作记录界面
经过后续的功能测试和循环寿命实验,该监控系统运行稳定、可靠,完全实现了上述的安全防护,优先级识别,实时监控等功能。
5 结语
该文设计了一种用于全自动驾驶线路的车库门监控系统。其控制系统实现了三级控制模式,并通过硬件,安全可靠的切换其优先级,各库门的控制软件和硬件还具有完善的安全防护措施。其监视系统可以实时监控系统内部,并收集、存储、显示各库门的状态和故障信息。因而,该监视系统解决了传统车库门的诸多问题,应用于全自动驾驶线路,可以在确保列车安全出入的前提下,极大提高运营效率,减少工作人员的负担。
