具有越障能力的机器人综述
2022-06-16刘俊阳王佳楠
刘俊阳,王佳楠
(中国石化大连石油化工研究院,辽宁 大连 116045)
0 引言
随着时代与技术的发展进步,机器人技术逐渐成熟,结合智能技术的机器人在生活与工作的各个领域内逐渐推广应用。按照国标机器人分类[1],根据机器人的运动方式,机器人被分为履带式机器人、轮式机器人、足腿式机器人、蠕动式机器人、浮游式机器人、潜游式机器人、飞行式机器人和其他运动方式机器人;根据机器人的应用领域,机器人被分为工业机器人、个人/家用服务机器人、公共服务机器人、特种机器人以及其他应用领域机器人。
在我国,机器人被应用于各种场景,主要用来降低劳动强度,执行危险或高精尖的工作。由于不同工作环境下的机器人的移动能力存在差异,适应的工作环境也不相同,其在复杂环境下的移动能力以及越障性能也越来越受到重视,故机器人在复杂环境下越障能力以及影响越障性能的影响因素被重点研究。本文主要针对履带式机器人[2-7]、轮式机器人[8-10]以及混合运动式机器人[11,12],对其零部件结构、运动过程运动方式、越障能力与影响因素进行分析,总结影响越障能力的内在机理,并对现有机器人越障能力进行分析与评价。
1 机器人越障能力分析
对机器人越障性能分析主要以结构性能研究为主,结合静力分析,考虑越障姿态等诸多影响参数的定量影响程度,以便于对结构参数进行进一步改进优化。
1.1 履带式机器人越障能力分析
履带式机器人由于越障能力、地形适应能力强、可原地转弯、在特种环境下越障性能更好、工作效率高等优点,在工业环境中应用范围广泛。对于提高履带式机器人越障能力,普遍基于结构改造方式,采用双履带变结构或者增加履带式摆臂结构等方式来提高履带机器人的越障能力。宗成国[2]设计了由前后两壳体组成的关节式双履带机器人(图1),通过在前后壳体关节处放置一种被动调节装置,来保证前后壳体存在角度时伺服压紧履带紧绷,使其越障性能和适应环境能力都得到提升。Zhao[3]针对越障能力设计一种变结构双履带机器人(图2),通过改变主、从动轮距离可以使履带变成三角形来实现越障,越障性能较好。以上两种机器人结构都采用类似的结构改造方式,即通过被动或主动调节主、从动轮,同时保证压实履带进而提高机器人的越障能力。但这种结构方式下机器人越障高度与变形后机器人的高度正向相关,如进一步提高越障能力会增加机器人总体长度,导致机器人大型化同时越障仰角更低。
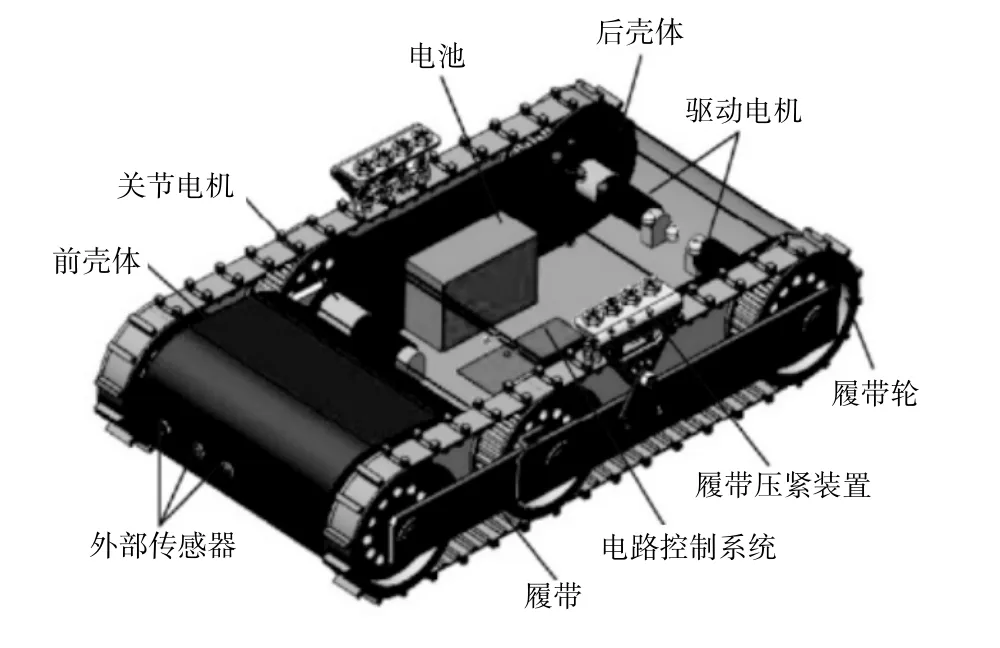
图1 关节式双履带机器人结构图

图2 变结构前后履带机器人结构
针对增加履带摆臂结构的四履带机器人(图3),刘昌福[4]分析了其在圆管以及楼梯结构处越障能力,以及越障过程中速度、加速度对越障动态稳定性的影响,并完成了越障可行性现场实验测试。王伟东[5]采用模块化思想设计一种四履带式机器人(图4),总结出一种基于动力学的越障运动规划方法。这种四履带机器人采用增加履带摆臂结构方式规避履带压实问题,同时增加履带摆臂结构使越障更加灵活,对机器人长度及重心影响较小,但理论越障高度仍和摆臂结构长度正相关。
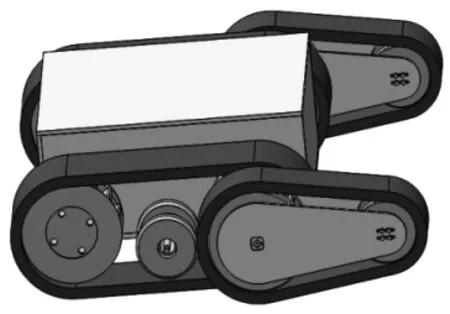
图3 小型关节式履带机器人结构图

图4 履带机器人整体结构图
还有一些文献进行了增加履带摆臂结构的六履带机器人的越障性能的研究,如徐如强[6]以六履带机器人为研究对象(图5),分析了典型障碍处的越障性能,得到了越障性能与结构特征的内在关系及机器人自身结构对越障性能的影响程度。赵建伟[7]建立了六履带巡检式机器人(图6)三维实体模型和运动学方程,分析了质心位置变化规律与越障高度。这种六履带机器人在前后摆臂结构的作用下越障能力有了极大的提升,机动性较高,但前后摆臂的存在导致机械结构较为复杂,机械传动效率随之降低,机器人整体结构较大,适应环境受限。
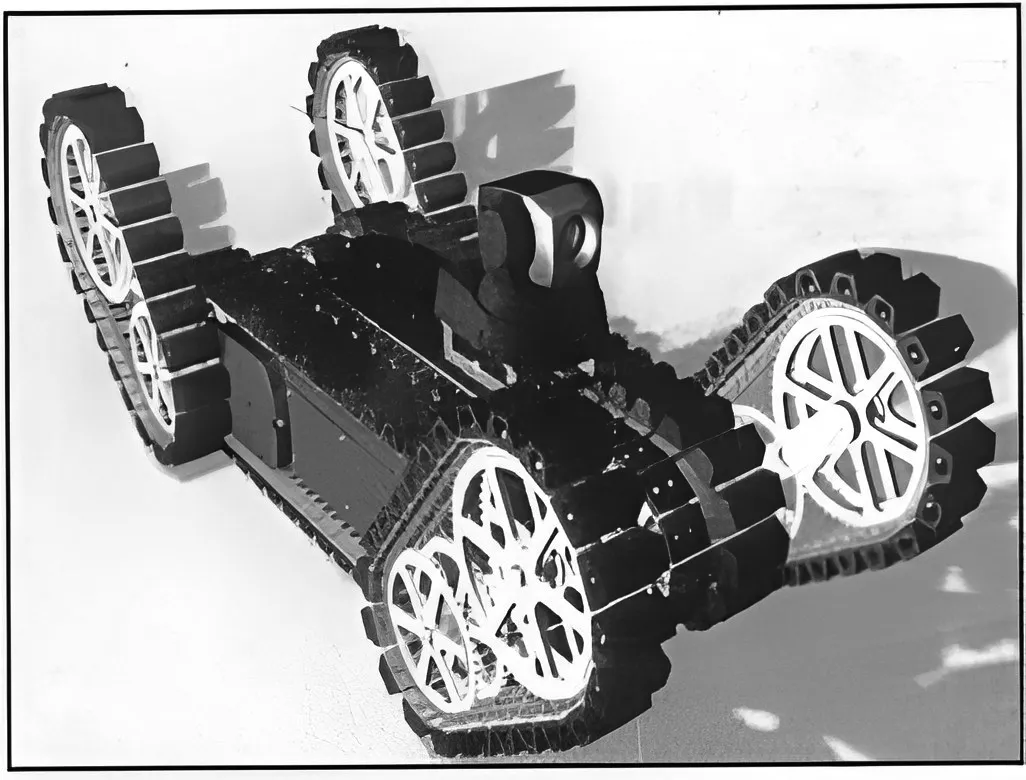
图5 六履带机器人结构模型
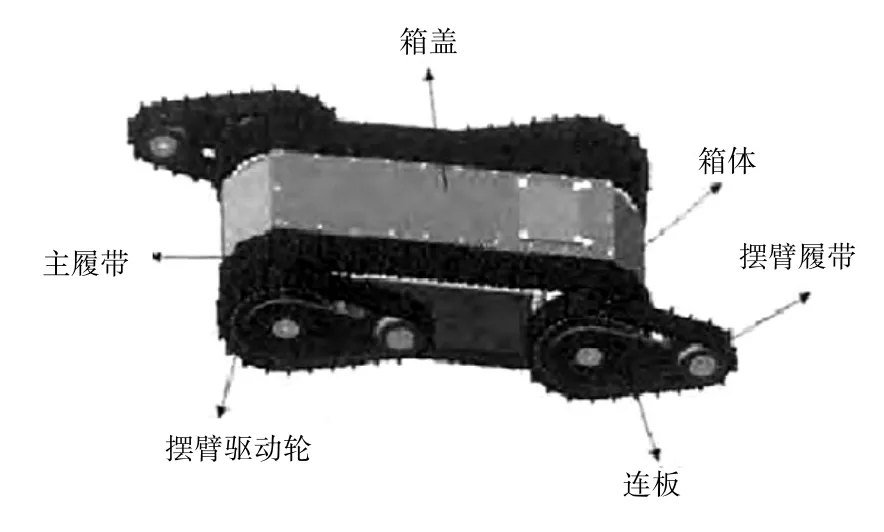
图6 六履带机器人结构图
1.2 轮式机器人越障能力分析
轮式机器人速度快、效率高、运动噪声低,但是越障能力较弱、地形适应能力差、转弯效率低。因此,需要对其越障性能以及运动效率进行改进。孙雪莲[8]设计了一种基于同步齿形带来保证六轮机器人同步性的全驱动方式(图7),有效地强化了越障性能并完成现场实测。张世月[9]针对一种六轮移动平台(图8),基于静力分析对各模块部件进行了轻量化改进,提高了机动性与地形适应能力。目前主要以优化结构方式提高六轮式机器人的越障性能。
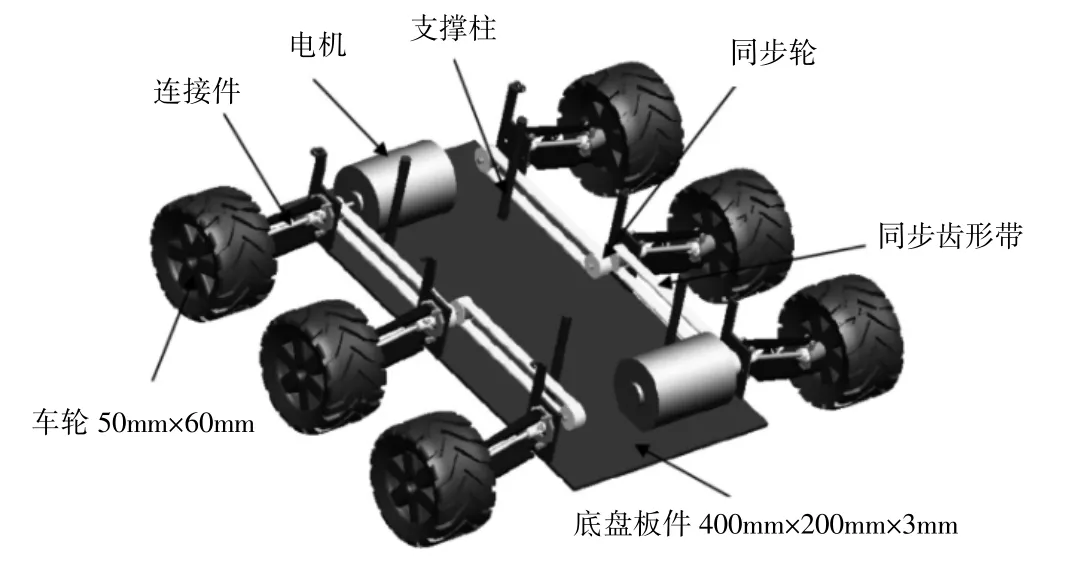
图7 六轮机器人底盘三维模型
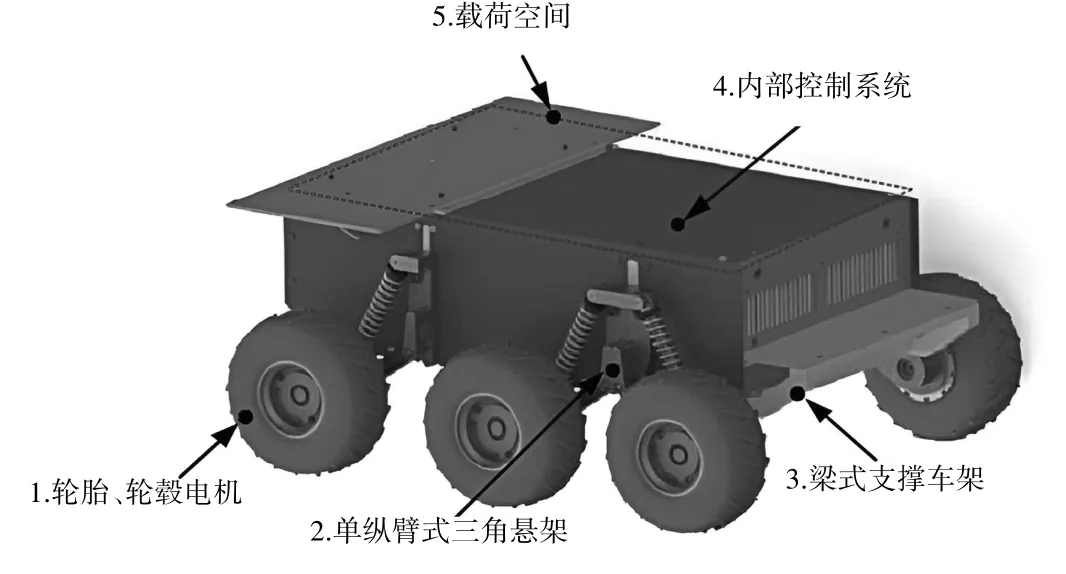
图8 六轮移动平台示意图
在套管内轮式牵引机器人方面(图9),马广志[10]针对其径向尺寸小的特点,通过爬行轮与套管内壁接触线与轴向方向存在偏心角来加强管内通过性,加强这种轮式牵引机器人越障能力。但是对牵引机器人的优化设计方面不够全面,对影响越障方面的因素研究较少,越障方面优化空间大。
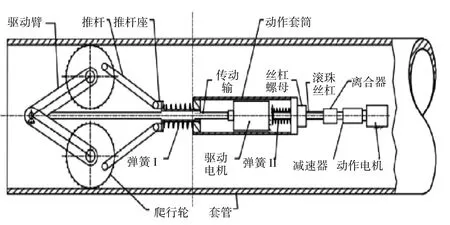
图9 水平井轮式牵引机器人
1.3 混合运动式机器人越障能力分析
混合运动式机器人是综合履带式机器人、轮式机器人等的结构特性,有选择性地结合了不同种类机器人结构及优点。宦朋松[11]提出了一种轮-腿复合式越障机器人(图10),在平缓地区这种机器人具有轮式机器人的灵活、机动性好的特点,当其遇到障碍物时,伸缩肢在链轮机构带动下具有腿式机器人的跨越姿态,环境适应力更强。但目前对这种轮-腿复合式越障机器人传动过程研究不够深入,结构部件的静力分析需要深入研究。李一鹏[12]基于摇臂悬架结构和行星轮驱动结构设计了行星轮链接式越障机器人(图11),这种机器人具有轮式机器人的较强机动性,也可以攀越超过自身高度的障碍物,越障性能获得显著提升。但这种行星轮链接式机器人结构复杂、零部件多且容易损坏,对工作环境要求较高。
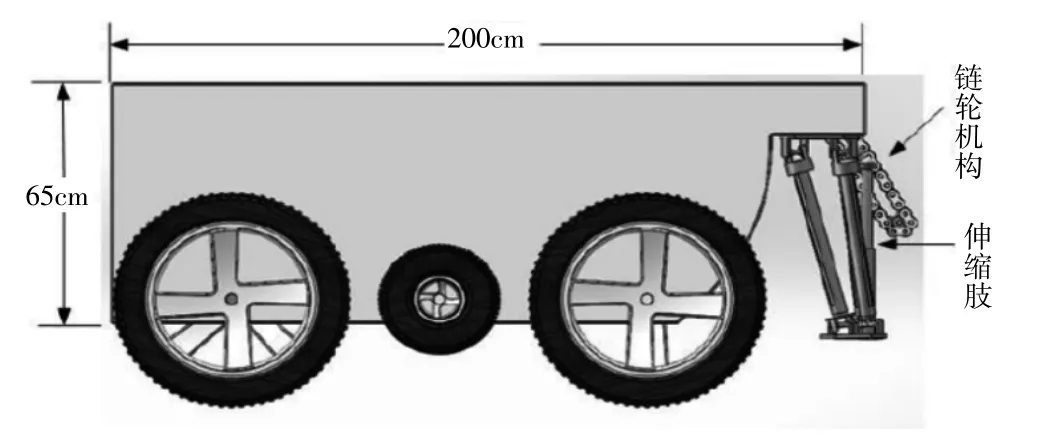
图10 轮-腿复合式越障机器人
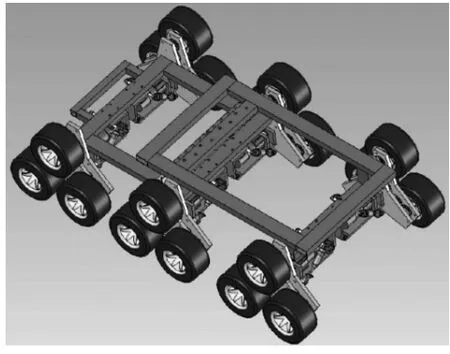
图11 行星轮链接式越障机器人
2 机器人越障过程现存问题
经过多年的优化设计与研究,国内外已经在机器人越障技术取得了丰硕的成果,但距大规模应用还有一定的差距。归纳起来有如下几方面的问题:
(1)对履带式机器人的越障性能的分析主要集中在斜坡、台阶、沟壑等传统障碍上,对多圆管、窄而陡的楼梯等一些特殊障碍并未进行稳定性分析。
(2)轮式机器人具有灵活轻便的优点,但由于其自身结构导致越障能力较差。
(3)机器人越障过程动力单一、动力系统体积大、质量大,导致越障过程安全性不足及效率不高。
(4)机器人控制系统主要依靠液压、气压驱动等直接控制方式,控制系统繁杂、操作繁琐且占用机器人空间大,操作存在延缓。采用远程遥控操作方式在电磁屏蔽环境下操作困难。
3 结论
机器人越障技术经过几十年的发展,目前正处于由实验研究向实际应用过渡的阶段。随着科学技术的发展以及越来越多的科研工作者对机器人越障能力优化的重视,未来研究重点可能集中在以下几个方面:
(1)控制智能化:机器人工作环境非常复杂,可能由于信号屏蔽致使通信中断,机器人无法及时收到远端控制指令,所以未来机器人需具备一定的智能控制能力,能够适应复杂工况。
(2)驱动精巧化:针对液压、气压驱动等方式繁琐且控制站占用空间大,电机驱动在易燃易爆场所使用受限等问题,设计出驱动精巧且本质安全的新型直接驱动方式。
(3)多能集成化:定量研究不同作业环境条件对机器人越障能力的影响程度,设计具有可变结构形式或可调结构参数的机器人,满足不同作业条件下对越障能力的需求。更进一步地,机器人可以通过智能感知作业环境,根据参数条件对自身结构自主优化调整或变换。
