上肢康复机器人机械结构及ADMAS动力学分析
2022-06-16喻行涛
喻行涛,张 珣
(1.安川首钢机器人有限公司,北京 100176;2.北京万东医疗科技股份有限公司,北京 100020)
1 机械臂结构设计
1.1 机械臂的组成与分类
机械臂主要由执行机构、驱动机构和控制系统上肢康复机器人这三大部分组成,本设计主要对机构的执行机构和驱动机构做详细的介绍[1]。
1.1.1 执行机构的设计介绍
执行机构主要用于传输的轴安装在机械臂的手臂的内孔中,并且可以随手腕传输以旋转,打开和关闭手指并弯曲手腕。上肢康复机器人的末端执行器以人的手指作为模型,可以分为无关节、固定关节和自由关节三种类型。末端执行器的手指部分可以分为两只、三只以及更多,本设计应用的两只结构应有最为广泛,根据夹持的医疗器械的形状来无固定的伸展。还有一种没有手指的手部,主要是运用真空吸盘和磁性吸盘来控制[2]。
机械臂手臂的作用主要是用来定位和抓取医用器械,并且把它运送到相应的位置。只有使三个自由度都准确定位,才能保证机械臂准确工作。机身躯干是主要用来安装机械手臂、动力源、减速器和各种执行机构的支撑支架[3]。
1.1.2 驱动机构的设计
机械领域的驱动机构主要分为四种类型:气动驱动、液压驱动、机械驱动和电机驱动。其中液压驱动和电机驱动使用最为广泛[4]。
液压驱动机构不适合用于医疗,因为它由油缸或马达、油箱、伺服阀和油泵组成,使用时噪音极大,而医院需要一个安静的环境[5]。
气动驱动机构也不适于用在医疗机械中,结构更简单,气源更方便,动作更快,成本更低,但是速度很难得到控制,气压也不稳定,因此也不适合医疗。
电机驱动机构方式是目前的上肢康复机器人使用得最多的一种驱动机构方式。它具有很多优势,例如:电源方便、反应很快、驱动力比气动方式大、信号检测和传动处理方便,可以同时用几种方案来控制,这些都是医疗器机械臂应具备的特性。
机械驱动机构方式只能用于机构固定的情况。它最大的特点是动作确定劳靠、成本低、传动速度高,但是调整起来不方便。综合上述优缺点选择了电机驱动的方式。
1.1.3 机械臂的设计
机械臂按用途分类为:
(1)通用机械臂。通用机械臂是专用机械改良形成的,能够针对各种动作做出不同的反应,具有不同作业方式的通用性。
(2)专用机械臂。专用机械臂是只对特定的一类作业起作用。因结构简单且较为实用,在医疗专业领域运用的比特别广泛。一般对一类医疗作业起作用[6]。
在工业机器人发展较为成熟的情况下,机器人开始用于医疗方面。在医疗方面的应用中最主要应用于外科手术的治疗,开始运用医疗机器人操纵手术刀和其他器械代替传统意义上的人工来医疗作业,与我们平时生活中常见的手术相比,医疗机器人技术具有下面几个特点:
医疗康复机器人技术完全实现由电脑控制,可以通过特定的运行轨迹实现较高的稳定性,机器人技术系统中具有较大的数据库比起人工经验来说具有较高的科学依据。对于医学康复来说,作业的空间非常的有限,而且会消耗很大的精力。用上肢康复机器人定位技术较好解决了上面的问题,减少了患者的体力消耗,并且机械臂可以达到很高的精度。
1.2 机械结构设计与分析
上肢康复机器人机械结构设计主要包括手臂机构、腕部机构、机座机构、末端执行器机构的设计。上肢康复机器人的机械结构设计涵盖四部分内容,分别如下:
(1)臂结构,也称为臂,由连杆和动态接头组成。它的功能是调整并支持整个末端执行器机构和腕部机构的定位坐标。
(2)手腕机构,也称为手腕,手腕的作用是链接末端执行器和小臂部分,并可使末端执行器自由旋转。
(3)末端执行器机构,又叫做手爪,这个部件很重要使用来抓取医用器械进行操作的机构,它以人手为模型模仿人手的握紧功能,并且安装在机械臂的前端因此成为末端执行器。
(4)机械底座是机械臂的支撑部分,起支承固定作用,能够承载和支持臂部的回转[7]。
1.3 上肢康复机器人整体设计
分析对介入手术机械医疗臂的研究,手臂的设计要求如下:
(1)最小载荷必须达到2 kg以上;
(2)所设计的尺寸尽量要小,前提是在足够的活动范围里;
(3)实现较高的定位精度。
为了实现手术的简单化要求机械臂的灵活性机械臂最少需要三个自由度,可由P(移动关节)和R(转动关节)组成。在上述机械机构中,直角坐标型工作范围比较小,不符合手术要求;圆柱坐标性、SCARA型要求结构尺寸比较大,不符合手术要求;我们对各种机械结构对比得知只有关节坐标结果可以通过后续关节设计以及对驱动结构的适当选择可以完成手术的各项要求,能承载2 kg以上的重力,并且具有手术所要求的高灵活性,在RRR结构的基础上设计机械手极其转动关节。
2 总体结构设计
所设计的上肢康复机器人定位机械臂的设计需要完成器械的抓取,移动以及定位。本该设计结构采用关节式设计,关节型的优点是传动时操作较为精确,零件与零件之间的结构简单,需要用到的空间也较小,这完全符合医疗器械的设计要求。机器人手臂的腰部和腕部都可以铰接,这对于某些需要精确操作,精确定位以及简单快速操作的任务非常有帮助。
由于底座需要驱动整个机械臂,因此转动惯量和质量非常大,伺服电机的额定转矩通常很小,不符合要求,因此由大功率直流电机驱动,由减速齿轮箱减速,然后驱动到机械臂结构的腰部上方。
直流电动机安装在底座箱的侧面。底座箱内部的减速器结构,用于降低速度并提供更大的扭矩。电动机固定在箱体上,电动机输出的扭矩传递到减速器形成反作用力,并且由于基座固定在地面上,因此箱体和上述部件被推动旋转。
腕部,也称为手腕部,是连接手臂和手抓之间的部分,是实现末端执行器在手臂和腰部工作空间中的三个位置坐标,并末端执行器在工作空间中的姿势坐标由手腕实现。腰部结构用于连接底座和动臂。
关于手臂的设计主要有大臂和小臂的设计,它们的结构和尺寸设计要能够完成工作时空间的要求,由手臂所受载荷和手臂的设计结构特点,我们合理的选择了手臂的材料灰铸铁HT200。本设计所使用的旋转轴的转动惯量和转矩不但大大减小了驱动装置的负荷而且减小了动态负荷和操作冲击,增加了运动的响应速度;要尽量的减小机械之间间隙所带来的运动误差,这样提高了运动精度和定位精度。
3 机械臂末端执行器的设计
3.1 末端执行器的设计要求
为了保持手指和被夹持医疗器械的正确相对位置,手指的形状要根据医疗器械的形状来变化。例如,所选的就是针对圆形手术刀的夹持利用的是V形表面的手指进行自动居中,手指不但要受到抓取的医疗器械的反作用力,更会受到器械运动时所带来的震动,我们不但要保证手指不会因此折断或者变形,而且要结构简单经凑,降低震动所带来的作用。
3.2 驱动力的计算
圆柱形销钉固定地安装在拉杆的端部,并且当向上拉动拉杆时,圆柱形销钉在两个手指的滑动槽中移动,从而驱动手指绕两个支点旋转。当按下操纵杆时,手指松开器械。手指抓紧医疗器械所需的力称为抓紧力(即夹紧力)。假想的抓握力作用在手指和医疗器械之间的接触表面的对称面上,并且两个力的大小相等,方向相反。
由此可看出,当驱动力恒定时,手抓的开闭角、手抓握力都增加。为了使手抓滑槽和拉杆的行程不会过大,所以要控制角度的α大小不会过大。因此,这里选取角度α=30°。所提到的手部结构简单而且动作灵活,两根手指之间的开合角度比一般的大。选用的手指夹住圆柱形机械仪器时,抓力的计算公式为N=0.5 g,因此可算出其大小。考虑各部件之间的作用力,震动力带来的影响,还有抓取医疗器械时的反作用力的作用,综上可以根据以下公式计算实际的驱动力。
4 静力矩估算与电机、减速器的选择
在选择电动机和减速器时,必须首先确定负载条件。在此基础上,通过计算负荷确定匹配的电动机减速器型号,然后可以根据安装需要确定电动机和减速器的安装结构。
4.1 电机、减速器的选择
腕部的结构有壳体、减速机和电机组成,质量为2.289 kg、0.56 kg和0.32 kg,所以这个部分的结构总质量m2=3.169 kg,总长度为165 mm。
由于手腕水平状态下转动惯量最大,因此在这种情况下,步进电机在旋转开始时产生的扭矩严重不足。将腕部、手部、医疗器械绕着他们自己的重心轴的转动惯量用JG2、JG1、JG来表示。
手腕转动的各部件的质量总和m1=10 kg,长100 mm,与手腕旋转有关的部分的质量密度平均分布在半径为50 mm的圆盘上,所带来的转动惯量:
把手臂的横截面设计为方形空心形式,因此弯曲系数大,横截面面积小,从而减轻了手臂的重量,使其既经济又轻便。
4.2 轴的校核
本设计所选用的轴的材料是45#钢,从查询表中可以看出,轴的容许扭剪应力为30 MPa,由容许应力确定的系数为C=120。
由于轴是齿轮轴,这样可使轴的轴直径更大,以满足齿轮啮合时的严格要求。齿轮分割圆直径为40 mm。轴承安装在齿轮的两端。加工肩部以定位轴承。齿轮轴配备有滚动轴承7003C,内径为17 mm。
在进行轴的初始结构设计之后,将执行检查计算。计算标准是满足轴的强度或刚度要求。计算轴的强度时,应根据轴的比重和应力采用相应的方法,并适当选择许用应力。对于用于传递扭矩的轴,应计算其抗扭强度。对于仅承受弯矩的轴(心轴),应根据弯曲强度条件进行计算,并根据疲劳强度条件等进行正确的验证。其他轴用相同方法计算,结果都满足要求。因为整个轴上的零件比较复杂,所以两个轴承之间以及套筒和轴承之间都有齿轮。因此d可以更大,这里d=17mm,轴承零件φ=17 mm,该轴承用于滚动 轴承,轴承类型为滚动轴承7003C,其余根据结构确定。因为载荷不大,所以选择轴承较大时强度足够。
4.3 基于Adams的动力学仿真
对Adams虚拟样机中构件主要属性参数,进行动力学仿真,仿真结果如图1所示。
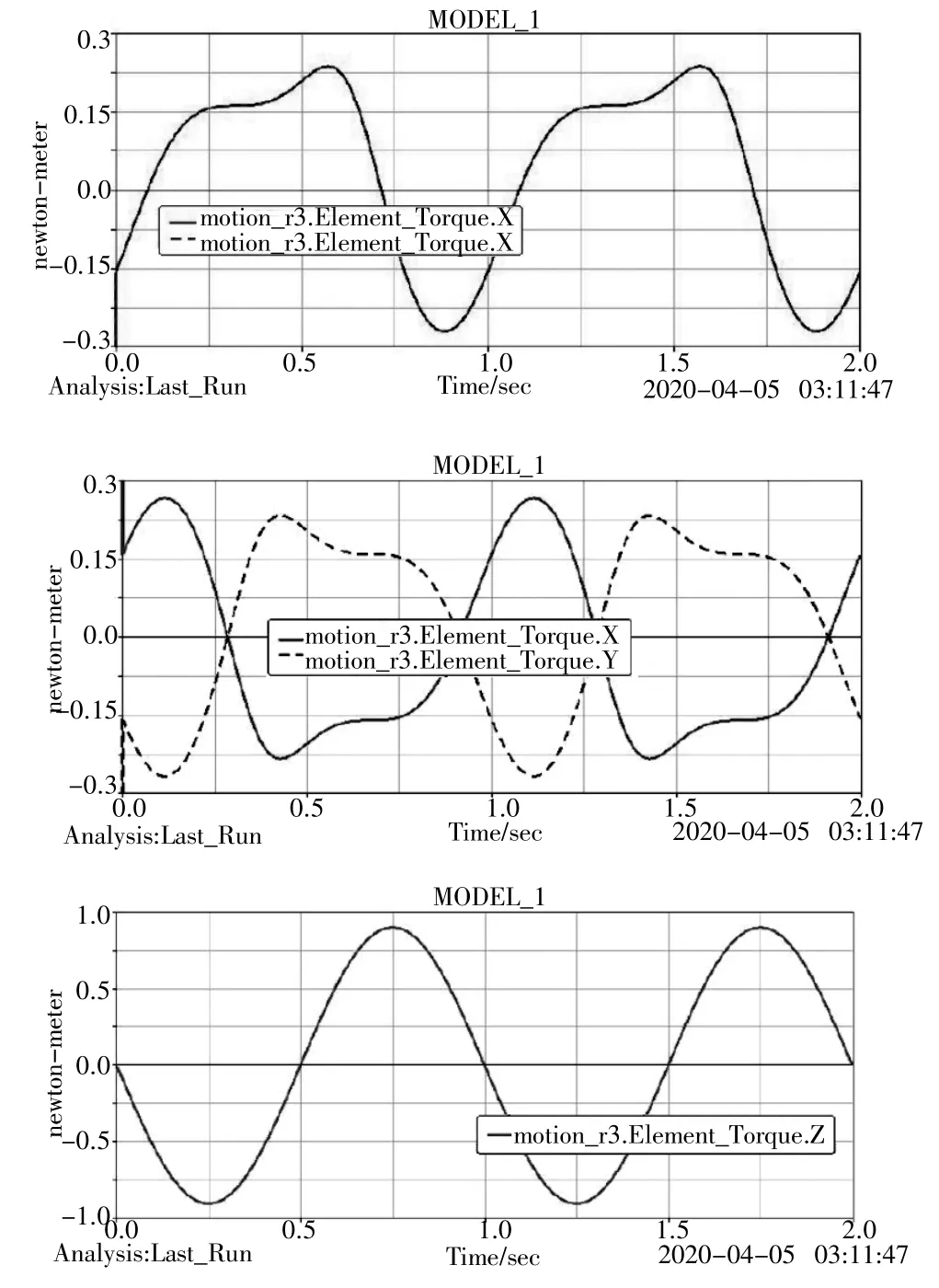
图1 Adams动力学仿真结果
基于Adams的各构件的运动轨迹曲线一致,验证了所做上肢康复机器人运动学分析的正确性。
5 结语
本研究完成了对上肢康复机器人的动力学研究,并结合模型提出了上肢康复机器人综合性能评价指标,利用ADAMS优化了上肢康复机器人结构参数。
