考虑多类开关动作特性差异的配电网两阶段协同负荷恢复模型
2022-06-15翁晓勇谭阳红
翁晓勇,谭阳红
(湖南大学 电气与信息工程学院,湖南 长沙 410082)
0 引言
尽管城市配电网大多采用双端电源供电模式,但是极端灾害导致的配电网长时间、大范围停电事故依然层出不穷[1]。在灾害引起的大规模停电事件中,配电网大多都失去了上级电网的送电支撑,且配电系统供电线路遭到大面积破坏,这将直接影响灾后终端用户的用电[2]。因而,如何提升上级电网送电长时间中断情况下配电系统灾后负荷恢复能力一直是电力部门的关注重点[3]。
目前,国内外针对此问题已经开展了大量研究,主要的恢复方法包括微电网构建[4-6]、分布式电源DG(Distributed Generator)[7-9]、网络重构[10-13]等。其中,网络重构手段由于能灵活改变配电网拓扑,使得网架拓扑与DG 出力更好地匹配,因而在灾后负荷恢复方面的优势较为突出。文献[10]计及灾害下线路故障的随机性,提出了基于鲁棒优化的配电网重构策略。文献[11]建立综合考虑孤岛融合和故障检修的网络重构模型,使负荷恢复率得到了大幅提高。文献[12]将配电网节点按模块划分,搭建了协同DG出力和开关操作的灾后多步重构模型。文献[13]基于生成树思想提出配电网新型辐射状拓扑约束,与传统约束相比更适用于灾后恢复场景。
然而,以上研究均假设配电网中所有开关装置类型一致,而实际配电网线路中装设有多类开关[14],例如断路器CB(Circuit Breaker)、隔离开关SEC(SECtionalizer)、负荷开关LBS(Load Breaker Switch)等。上述文献忽略了不同类型开关的动作特性差异,没有考虑多类开关的协同动作,使得网络重构模型缺乏实用性。此外,这些文献所提的重构约束不允许停电孤岛存在,因此无法直接应用于多类开关动作场景。
网络重构虽然能提高灾后负荷恢复水平,但由于故障线路存在,无法完全恢复配电网供电,因此需要与故障维修相配合。文献[15]对线路维修人员和开关操作人员调度、开关动作顺序进行协同优化,提出变时间尺度的配电网灾后恢复框架。文献[16]考虑维修时间和其他因素的不确定性,建立基于邻域搜索算法的多源协同恢复模型,能够在规定时间内得到有效的恢复计划。文献[17]结合市场价格模型,以电网利润最大化为目标函数协调维修调度和配电网运行,为配电网灾后恢复提供了新的思路。文献[18]将智能软开关融入配电网重构中,在此基础上优化调配移动电源、维修人员,并采用加速算法求解模型,在提升灾后供电恢复能力的同时缩短了模型的求解时间。文献[19]提出考虑多源协同下含故障定位、故障隔离和恢复的全方位韧性提升框架,可帮助电网制定全面的灾后调度计划。文献[20]建立计及运维人员和维修人员调度的变时间尺度恢复模型,可无缝协调多项故障处理任务。上述研究虽然在资源协调、模型计算速度等方面取得了较大进展,但大多集中于灾后服务恢复阶段,鲜有考虑故障隔离阶段的初步隔离。实际上两阶段相互耦合,只有当故障被隔离后才能恢复非故障区供电[21-22]。
针对以上研究存在的不足,本文提出考虑多类开关动作特性差异和网络重构的配电网两阶段协同负荷恢复模型:建立隔离开关、负荷开关、断路器动作特性约束,使得模型可以获得符合实际操作规范的开关动作次序,为应急管理人员提供合理的操作决策;考虑停电孤岛情况,对传统的网络重构模型进行改进,使其可以提升拓扑重构的灵活性,扩大重构模型在灾后的应用范围;建立考虑故障隔离和服务恢复两阶段协同的灾后配电网开关动作和维修调度模型,有效提高了配电网灾后负荷恢复能力。
1 问题描述
1.1 多类开关动作描述
本文的研究重点为灾后阶段断路器、隔离开关、负荷开关的动作协同性,保护装置自动动作带来的影响不在本文讨论范围内。为了简化分析,模型中仅考虑可远程控制的开关类型[18],实际配电网中还包括手动控制开关[15],其涉及开关操作人员的调配问题,将在今后的研究中对其进行讨论。
开关动作时必须满足各自的动作特性,例如:隔离开关不能在带电状态下操作;负荷开关动作范围仅限于正常负荷电流,不包括故障电流[14]。灾后阶段配电网开关动作顺序如附录A 图A1所示。首先,负荷开关LBS2闭合恢复母线6处负荷;接着,断路器CB3断开隔离母线7 处故障;然后,负荷开关LBS1断开,使得隔离开关SEC1能够在断电区域内闭合;最后,负荷开关LBS1闭合使得母线4 处负荷恢复。由图A1 及上述步骤可知,最终配电网拓扑中仅3 个开关状态发生了改变,却需要5 步操作才可以实现。因此,在配电网故障环境下,各类开关需要经过多步协同动作才能完成故障隔离和负荷恢复任务。
1.2 两阶段协同恢复模型描述
极端灾害下配电网恢复流程[23]见图1。本文的研究对象为灾后故障隔离和服务恢复两阶段:在灾后故障隔离阶段,开关打开以初步隔离故障,缩小故障区域;在服务恢复阶段,各类开关协调动作并配合线路维修工作,使得负荷恢复量最大。
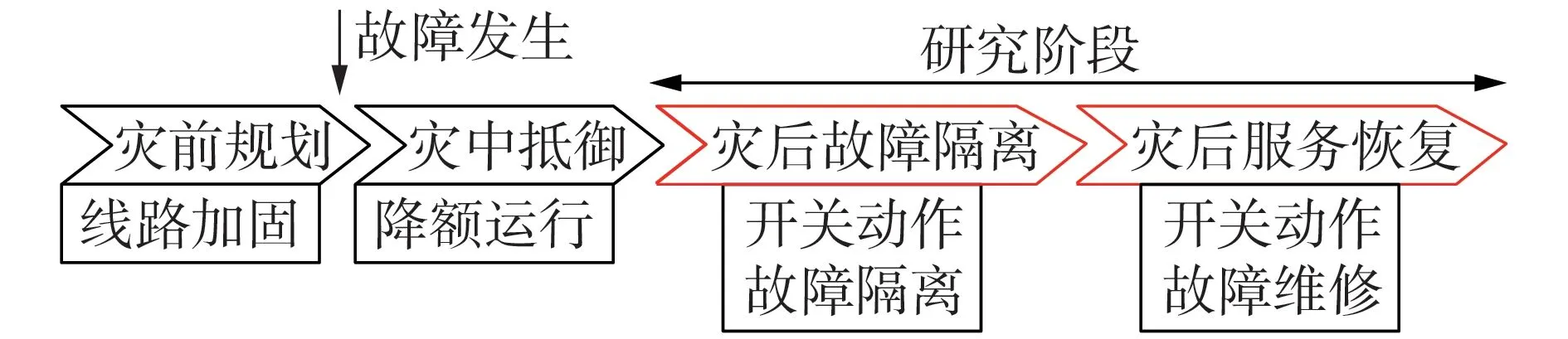
图1 极端灾害下配电网多阶段恢复流程Fig.1 Flowchart of multi-stage restoration of distribution network under extreme disasters
尽管灾后故障隔离和服务恢复属于不同的阶段,但是它们并不是相互独立的。两阶段在时间跨度上是连续的,隔离阶段的开关最终状态是恢复阶段的开关起始状态,其直接影响恢复阶段开关的动作顺序和线路的抢修次序,进而影响总体恢复结果。
综上所述,为了在灾后更大程度地恢复用户负荷,电网公司在制定灾后恢复计划时需考虑两阶段耦合性。
2 负荷恢复模型
2.1 目标函数
本文构建的负荷恢复模型包含灾后故障隔离阶段和灾后服务恢复阶段。在电网长时间停电的情况下,电网公司的首要任务是尽可能多地恢复配电网负荷[17],基于此本文暂不计及DG 发电成本。由于开关动作成本与切负荷成本相比可忽略不计,因此本文将目标函数设定为灾后配电网两阶段时长内切负荷总成本最小,在后续研究中将考虑用户侧DG(住宅屋顶光伏等)参与恢复带来的调度成本。本文所提配电网恢复模型框架如图2所示。
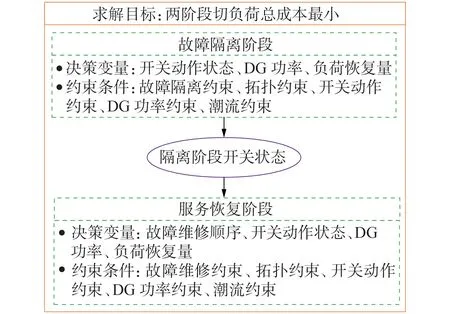
图2 配电网恢复模型框架Fig.2 Restoration model framework of distribution network
基于上述分析,模型的目标函数如式(1)所示。

式中:T为两阶段总时间集合;ΩN为配电网节点集合;Ci为节点i处的负荷权重分别为t时段节点i处的有功负荷需求量、有功负荷恢复量;Δt为单个调度时段间隔时长。
2.2 两阶段共有约束
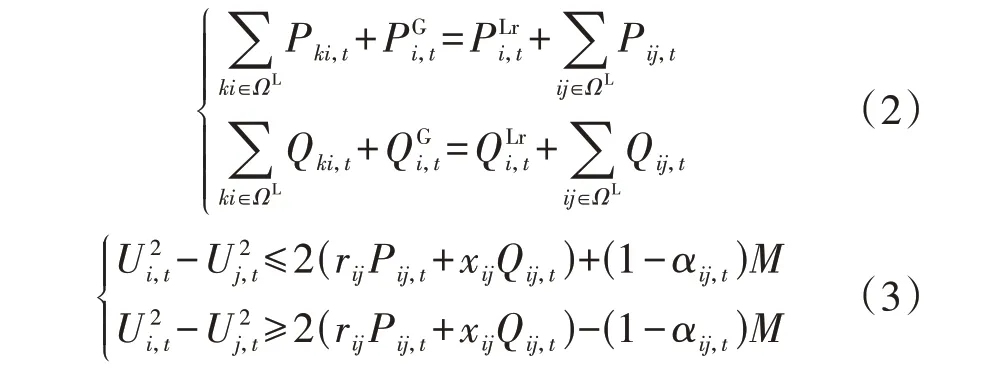
1)配电网潮流约束。
本文采用大M 法与线性化潮流方程[24]相结合的形式描述拓扑多变的辐射状配电网潮流约束,如式(2)、(3)所示。
节点负荷恢复量、线路传输容量需满足以下约束:

式中:ΩL配电网线路集合;Pij,t和Qij,t分别为t时段节点i、j间传输的有功功率和无功功率分别为t时段节点i处的DG 有功出力、无功出力为t时段节点i处的无功负荷恢复量;Ui,t、Sij,max分别为t时段节点i处的电压幅值、线路ij最大视在功率值;αij,t表示t时段线路ij的连通性,连通则其值为1,否则为0;ei,t为t时段节点i的恢复标志,恢复则其值为1,否则为0;M为一个数值很大的常数;λi为节点i处的负荷功率因数;式(3)中的潮流方程忽略了线路功率损耗,但是对于恢复模型而言误差可忽略不计[24];本文将配电网节点负荷简化处理为可控的恒功率因数负荷[18];约束式(5)表示各节点负荷在满足恒定功率因数约束的条件下可在负荷需求值范围内合理削减,使得系统保持实时潮流平衡。
2)DG功率约束。
本文考虑的主导DG 类型为可控型,光伏、风力机组由于其出力不确定性会影响孤岛运行时的安全性[25],因此本文不考虑新能源机组的参与。DG功率约束如式(6)所示。
式中:ni,t表示t时段节点i是否属于故障区域,属于则其值为1,否则为0;分别为DG有功出力的最小值、最大值为DG 最小输出功率因数;ΩG为接入DG 节点的集合;为DG 额定容量;约束式(6)表示DG 位于故障区域时有功、无功出力必须为0,同时输出功率应满足功率因数约束和容量约束[12]。
3)拓扑约束。
配电网运行拓扑通常为放射状[10],已有很多文献提出了此类拓扑约束,但是现有的约束模型大多需要预先固定孤岛数目(1个带电孤岛内仅存在1个DG),且无法考虑停电孤岛的存在[11]。固定孤岛限制会影响拓扑重构的灵活性,导致DG 出力和孤岛负荷不能较好地匹配,进而直接影响整体负荷恢复效果。此外,本文考虑了多类开关动作以及故障传播,停电孤岛情形的缺失会导致无可行解。基于以上不足,本文对传统生成树约束[13]和虚拟潮流约束[26]进行结合及改进,使得新的约束模型能够突破以上限制。
式中:γij,t为t时段线路ij带电标志,带电则其值为1,停电则其值为0;kij,t表示t时段节点j是否为节点i子节点,是则其值为1,否则为0。约束式(7)表示当节点i、j间存在唯一根节点时,线路ij带电,此时线路连通且两端节点都处于恢复状态;约束式(8)表示连通线路两端的节点恢复状态相同。
式中:c(i)为与节点i相连的节点集合;si,t表示t时段节点i处DG 是否为主导DG,是则其值为0,否则为1。约束式(9)表示除DG 节点外,当且仅当节点i存在1 个根节点时,其处于恢复状态;约束式(10)表示节点i处DG为主导DG时,无根节点。
式中:NG为配电网DG 总数为t时段带电孤岛个数。第1 个公式考虑了1 个带电孤岛存在多个DG的情况,同时使得1 个孤岛内仅有1 个主导DG;第2个公式表示所有带电孤岛保持放射树状结构,即带电孤岛数应等于配电网节点恢复数与带电线路数之差[12],此处排除了连通但不导电线路,即允许停电孤岛的存在;第3 个公式限制带电孤岛数不超过DG总数。
当1 个孤岛内存在多个DG 时,单独的生成树约束不能保证所有带电孤岛为辐射状结构[26]。因此,本文增加了以下虚拟潮流约束:

4)节点电压约束。
式中:Umin、Umax分别为节点i处的电压幅值下限、上限;Uref为节点额定电压。约束式(16)表示在恢复状态下各节点电压幅值的平方应保持在规定范围内,停电状态下节点电压为0;约束式(17)表明恢复状态下主导DG节点电压为参考电压[18]。
5)开关动作约束。
式中:dij,t为t时段线路ij上的开关动作标志,开关动作则其值为1,否则为0。为了获得有效可操作的开关动作次序,并考虑到开关频繁动作会对电网运行安全性造成不利影响,约束式(19)限制每个时段内最多1 个开关动作。在总停电时长固定的前提下,开关最大总动作次数取决于每个时段的时长,其可以根据实际应用情况(总时长内最大允许开关动作次数等)进行合理选择。
多类开关动作需满足下述约束:
式中:ΩSEC、ΩLBS分别为安装了隔离开关和负荷开关的线路集合。约束式(20)规定隔离开关只能在线路两端断电时动作;约束式(21)表示负荷开关不能在同时位于故障区域和供电区域时动作。
2.3 灾后故障隔离阶段约束
在进行故障隔离时,故障区域配电网节点不能恢复供电[22]。由于开关数量和安装位置限制,该阶段只能进行故障初步隔离[25]。具体描述如下:
式中:fij,t表示t时段线路ij是否发生故障,发生故障则其值为1,否则为0;Tiso为故障隔离阶段的时段集合。约束式(22)、(23)表示当闭合线路上存在故障时,线路两端节点均为故障状态,且连通线路两端故障状态相同;约束式(24)表明故障区域内的节点处于停电状态;约束式(25)表示不允许在故障隔离阶段进行开关闭合操作[25]。
2.4 服务恢复阶段约束
服务恢复阶段的重要任务是维修故障线路,协调配电网运行找到最优维修顺序。由于带电维修方式不适用于所有故障线路[16],本文考虑停电检修和带电检修2 种方式。值得说明的是,约束式(22)—(24)在此阶段依然适用。区别于灾后故障隔离阶段,开关在服务恢复阶段可以闭合。
式中:ΩEL为需停电检修的线路集合;Tres为服务恢复阶段时段集合;gij、pij分别为故障线路ij的起始维修时间和维修时长;hij,t表示t时段线路ij是否修复完成,完成则其值为1,否则为0;wij,t为t时段线路ij的维修标识,处于维修期间则其值为1,否则为0。约束式(26)、(27)为起始维修时间和修复完成时间约束;约束式(28)、(29)表示所有故障线路必须被维修,且仅当维修结束后线路才不再处于故障状态;约束式(30)表示停电维修线路必须在线路两端断电的情况下进行检修。
由于配电网抢修资源限制,线路抢修需同时满足以下约束:
约束式(31)表示每个时段维修队最多修复1 条线路;约束式(32)表示每个平均维修时长t0内维修队的最大检修线路数为Nr,本文取Nr=3条。
2.5 模型线性变换
由式(1)—(32)组成的模型属于非线性规划模型,其中约束式(4)、(6)、(7)、(22)、(30)均包含非线性约束,通过线性变换使得模型能够通过求解器高效求解。
采用六边形线性逼近方法[12]将容量约束式(4)转化为式(33)。同理,对约束式(6)中的DG 容量约束进行线性化处理。
式中:Sij,t为t时段线路ij最大视在功率的替换变量。
通过恒等变换将式(7)中的乘积式约束转化为如下线性约束:

约束式(22)、(30)的处理方法同式(7)。
经上述转换,原非线性模型可转化为混合整数线性规划MILP(Mixed-Integer Linear Programming)模型,在MATLAB 环境下建模并调用CPLEX12.6 求解器求解。
3 算例分析
3.1 算例数据描述
本文基于如图3 所示改进的IEEE 33 节点配电系统进行算例分析。配电系统中接入4 个可控DG,按所在节点序号递增的顺序依次编号为DG1—DG4,额定容量均为350 kV·A。各节点负荷变化系数见文献[17],节点在每个调度时段的负荷最大需求量可以由各节点的基础负荷与该时段节点负荷变化系数相乘得到。开关设定为7个断路器、6个隔离开关和5 个负荷开关,为了简化分析,假设网络中负荷开关和断路器的最大开合电流满足配电网故障场景。网络中负荷等级分为一级和二级[11],对应的中断成本分别为8、2元/(kW∙h)。
图3 改进的IEEE 33节点配电系统示意图Fig.3 Schematic diagram of modified IEEE 33-bus distribution network
假设极端灾害后配电网上级送电通道严重损坏,同时网络内多条供电线路故障,线路1-18、4-5、8-9 需要停电检修,其余故障线路可带电抢修。为了简化计算,设定每条线路的故障抢修时间等于平均维修时长,取为1.5 h。经过电网公司停电评估[16]后,预计配电网停电时间长达7 h,停电时段为09:00—16:00,每个调度时段为30 min,总时段数为14。依据停电评估结果将灾后故障隔离和服务恢复阶段的时长分别设定为2 h和5 h。
为验证本文所提配电网恢复模型的有效性,设计以下3种恢复方案进行仿真对比。
1)方案1:不计及开关特性差异,假定所有开关都具有断路器功能,考虑两阶段协同恢复。
2)方案2:计及开关特性差异,采用文献[15-18]所提方法,在故障隔离阶段不进行初步隔离,只考虑服务恢复阶段负荷恢复。
3)方案3:采用本文模型,计及开关特性差异,考虑两阶段协同恢复。
3.2 算例优化结果分析
3 种恢复方案的优化结果如表1 所示。由表可见:方案1 虽然不计及开关特性差异,但由于断路器和负荷开关所占比重较大,与方案3 相比,方案1 对负荷恢复效果的提升作用并不大,总负荷恢复率仅增加了1.66%,中断成本也只在服务恢复阶段有所降低,总成本比方案3下降了1.4%;方案2由于在故障隔离阶段不进行初步隔离,服务恢复阶段的负荷恢复效果受到较大影响,故障隔离阶段和服务恢复阶段的中断成本比方案3 分别提高了15.63%和36.32%,总负荷恢复率下降了10.59%。
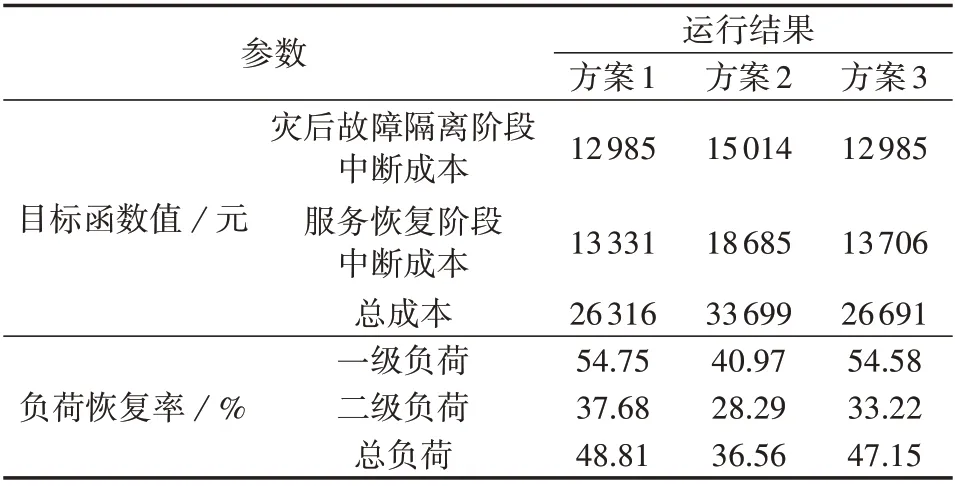
表1 3种方案的优化结果对比Table 1 Comparison of optimization result among three schemes
上述结果证明了本文所提模型在实际场景下的有效性。虽然方案1的负荷恢复效果略优于方案3,但方案1 统一化了各类开关的动作特性,在实际应用中并不适用。
为了证明考虑开关动作特性差异的重要性,本文对方案1进行分析。3种方案开关动作顺序如表2所示。表中:开关的数字下标为开关所在节点编号;↑、↓分别表示开关打开、闭合。方案1 中时段9 的孤岛划分结果和故障维修顺序如附录A 图A2所示,故障上方的红色数字为线路可以恢复供电的时段。
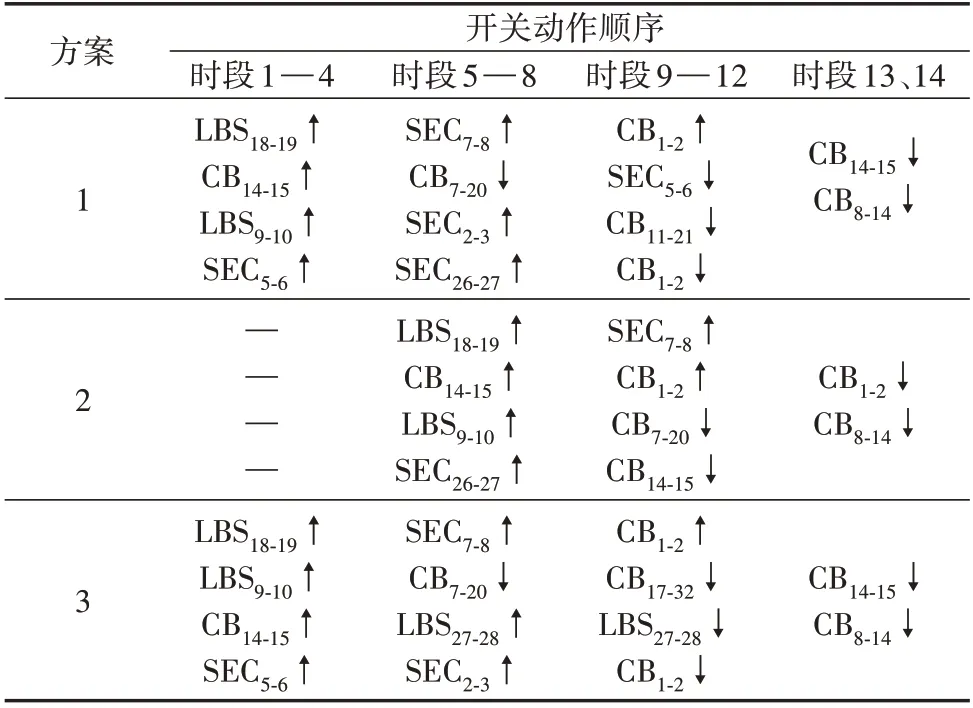
表2 3种方案的开关动作顺序对比Table 2 Result comparison of switching operation sequence among three schemes
以时段5—10 为例对方案1 进行说明,在故障隔离阶段孤岛的基础上,隔离开关SEC7-8和联络线断路器CB7-20在时段5、6配合动作恢复节点6、7处供电;随后隔离开关SEC2-3和SEC26-27依次打开隔离故障线路4-5。故障线路4-5 在时段9 已被成功修复,为了恢复节点3—5、25、26 的供电,在时段10,隔离开关SEC5-6在节点6已通电的状态下被要求闭合,这显然不符合实际操作规范。同理分析可得方案3 的开关动作次序满足操作要求。可见,只有计及开关动作特性差异才能得到可行的开关动作解。
从表1 可知,两阶段协同恢复模式比单阶段恢复模式取得了更好的恢复效果。为了更好地说明本文所提模型的优势,本文对方案2、3 进行对比讨论,2种方案的DG有功出力如附录A图A3所示,每个时段所有DG 有功功率和等于该时段的负荷有功恢复量。在故障隔离阶段以及服务恢复阶段的时段5—10,方案3 的负荷恢复量远高于方案2,因此对上述时段进行重点分析。
故障隔离阶段结束后方案2、3 的孤岛划分结果和维修次序如附录A图A4所示,2种方案的两阶段配电网的节点状态如图4 所示。由图可见:在故障隔离阶段内,方案2没有采取隔离操作导致所有节点都在故障区域内,无法进行恢复;而方案3 对故障进行了初步隔离,恢复了节点19—21、10—14的供电。
故障隔离阶段的孤岛划分结果直接影响到恢复阶段开关动作。在时段5、6,方案3可以直接在故障隔离阶段的孤岛基础上操作隔离开关SEC7-8和断路器CB7-20恢复节点6、7处的一级负荷供电,而方案2只能先打开负荷开关LBS18-19恢复节点19—21的供电。
此外,开关动作次序也影响了维修顺序。方案2为了尽快恢复节点3、6、7的供电,选择将需停电检修的故障线路4-5 作为第2 个维修目标。而方案3由于利用故障隔离阶段孤岛划分的优势先于方案2恢复了节点6、7 的供电,因此优先修复故障线路23-24使得DG3恢复运作。在时段9、10,方案2和3分别恢复了节点2—7、22—26 和节点2、15—17、22—24 的供电。虽然方案2 在这2 个时段恢复的节点数更多,但一级负荷恢复量少于方案3。由图4 可见,方案3 在服务恢复阶段的总体恢复速度和恢复效果优于方案2。
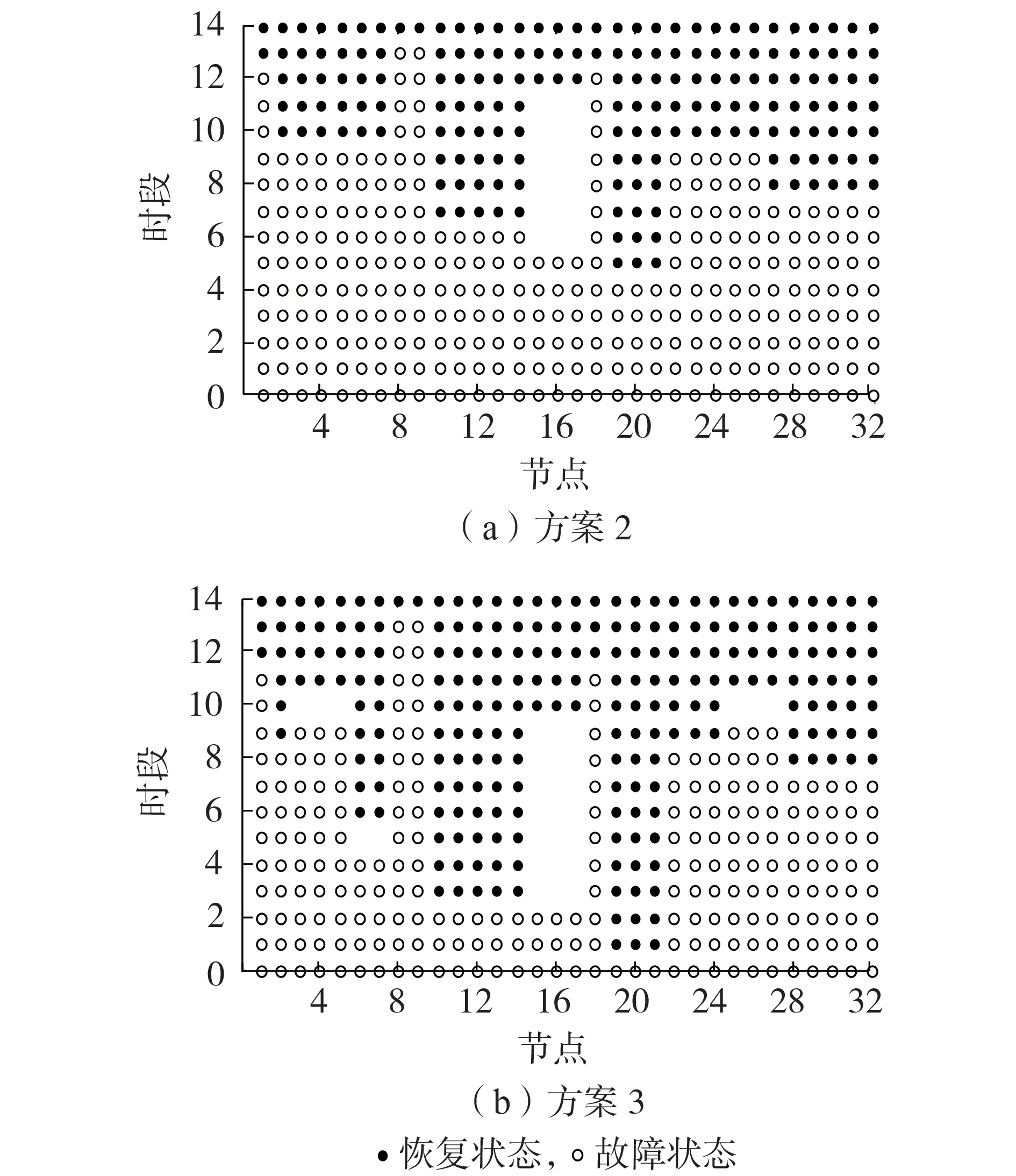
图4 方案2、3的配电网节点状态Fig.4 Node status of distribution network in Scheme 2 and 3
综上分析,两阶段协同恢复模式可以显著提高配电网灾后负荷恢复能力。
4 结论
本文考虑多类开关动作特性差异,从故障隔离和服务恢复两阶段协同角度开展研究,所得结论如下:
1)本文所提模型改进了传统重构约束且加入开关动作特性约束,可以在满足停电孤岛和孤岛融合场景下得到符合实际操作规范的开关动作次序,提升了模型的实用性;
2)采用两阶段协同恢复的模式可以更好地协调开关动作和维修调度,有效提高配电网灾后总体负荷恢复能力。
未来将考虑重合闸开关的参与并加入开关动作电流约束和暂态约束,讨论开关动作对电网频率安全和电压安全的影响,进一步提升模型应用价值。
附录见本刊网络版(http://www.epae.cn)。