勘探船舶吃水及姿态调整系统研究
2022-06-15贾旭东李志雨张楚银
贾旭东 李志雨 张楚银

摘要:勘探船舶在营運过程中由于油水消耗、固定装载变动以及结冰等情况导致船舶吃水和倾角发生变化,而这些变化会对船舶安全性、操纵性和经济性产生不利的影响。该文在深入分析这些不利影响的基础上,提出一种充分利用勘探船现有装置并加装一个中央控制单元形成一套适合勘探船舶使用的吃水及姿态调整系统,对船舶进行压载水的压、排,燃油舱及淡水舱的动态调配,保证船舶姿态及吃水保持在适合的状态,从而保证船舶运营的经济性。
关键词:勘探船舶 吃水 姿态 调整系统
中图分类号:U663文献标识码:A 文章编号:1672-3791(2021)05(b)-0000-00
作者简介:贾旭东(1972—),男,学历,工程师,研究方向为船舶装备管理。
船舶吃水和姿态对船舶的操控性、安全性、经济性及舒适性影响重大。良好的船舶吃水状态和船舶姿态能够有效提高船舶操控性能、降低运营能耗、提高船舶运营经济效益。
勘探船舶作为海上勘探作业的工作平台,其高效节能的运行,对于降低勘探成本、保护海洋环境,意义重大。
1 勘探船舶营运特点
勘探船舶是指从事海洋工程物探与测绘、工程地质取样(芯)与原位测试的专业船舶,包括工程物探、工程地质钻探船和综合勘察船。
勘探船舶的特点有:(1)船舶上专业设备较多,船体结构相对复杂,其压载水舱、燃油舱和生活淡水舱较多且分布较广;(2)船舶重心较高,初稳性高余量相对较小;(3)勘探船舶的载重主要是可变甲板载荷(专业设备)、燃油、淡水及生活物资等;(4)海上勘探作业时,其船舶载重的变化较为规律。
2 船舶吃水及姿态对勘探船舶性能的影响
2.1对操控性的影响
2.1.1 船舶吃水对操控性的影响
船舶吃水增加时,舵力的旋回阻距增加,船舵的转船力矩降低,通过重心竖轴的转动惯量增加,致使初始旋回减慢,船舶纵距、横距及旋回初径均增加;船舶吃水过浅,会使舵力降低,致使船舵的转船力矩减小,船舶的旋回性能降低,旋回初径增加;同时,过浅的吃水,会使船舶浮心降低,船舶稳性变差,影响船舶舒适度及船舶安全。
2.1.2 船舶姿态对操控性的影响
(1)船舶横倾:船舶在起航和低速航行时,因船舶两侧浸水面积不等,受到水的摩擦阻力不同,浸水面积大的一侧(即船舷低的一侧)水阻力大,在阻力-推力转矩的作用下,船舶向低舷侧转回。
船舶高速航行时,因低舷侧吃水较高,形成的船艏兴波大于高舷侧,两舷压力差指向高舷侧,此时,首波峰压力转矩起主要作用,船艏会向高舷侧偏移。
(2)船舶纵倾:一般当船舶艏倾时,船舶的旋回初径减小;船舶艉倾时,船舶旋回初径增大。
2.2 对安全性的影响
船舶吃水及姿态对船舶安全性影响主要体现在对船舶稳性方面。另外,船舶操控性能的优劣,直接影响船舶航行安全。特别是在恶劣天气、复杂海域航行及避碰时尤为重要。
船舶在营运过程中油水的消耗导致船舶吃水减小,且重心通常升高,导致船舶受风面积增加,初稳性高降低,稳性性能变差。当船舶产生较大初始横倾角时,船舶的稳性力臂曲线下面积减少,船舶静稳性和动稳性性能变差。
2.3 对经济性的影响
船舶的经济性主要体现在燃油消耗量上。船舶的燃油大部分是用来克服船舶阻力,推动船舶航行所消耗掉的。
2.3.1 吃水对经济性的影响
船舶阻力由摩擦阻力、粘压阻力和行波阻力组成,低速船(傅汝德数r<0.18),船舶的阻力主要是摩擦阻力,占70%~80%,粘压阻力占10%以上,而兴波阻力很小。而高速船(傅汝德数r>0.3), 兴波阻力所占比重明显提高,占40%~50%,摩擦阻力占到50%,而粘压阻力所占的比例为5%。民用船大部分属于中、低速船舶。
根据傅汝德数的计算公式:
中海油服某型二维勘探船,其最高船速为15节;船长为84.6 m,其傅汝德数为:
是一艘低速的船舶,其船舶阻力主要来自于摩擦阻力。
船舶的摩擦阻力主要取决于船体的浸水面积,即船舶吃水。吃水过深,船舶摩擦阻力增大,导致船舶油耗增加,船舶运行经济性降低。
2.3.2 纵横倾对船舶经济性的影响
船舶纵横倾时导致船舶能耗损失的情况主要包含两个方面:一是船舶纵横倾会在一定程度上增加船舶的航行阻力,导致所需要的推进功率增加;二是船舶纵横倾会影响船舶的操纵性和舵效,增加航行过程中人为操纵干预,从而增加船舶能耗消耗。
海军大连舰艇学院吴明等采用数值计算和模型试验的手段对船舶几种浮态下的阻力规律进行了研究,表明船舶在不同程度的艏倾、艉倾和横倾下,船舶阻力均有一定程度的增加,且倾角越大,阻力增加越大,在高航速下更加明显。
船舶艏倾时,船艉舵和推进器入水过浅,舵效降低,船艏受阻力增加, 操纵性能差,增加船舶能耗。
船舶平吃水时,空载船舶整体吃水小,船舵和推进器入水浅,致使船身受风面积增大,船舶航行阻力增加,船舶操纵性和快速性差,增加船舶能耗。
船舶艉倾时,船艉吃水较大,船艏上翘,受风面积增大,尤其在船舶受横风时,船艏受风影响较大,船舶的舵效减弱,船舶操纵性变差,且过大时会增加船艏盲区,影响船舶安全。
3 勘探船舶吃水及姿态调整系统
3.1 设计思路
勘探船舶的姿态及吃水的改变主要是因燃油的驳运、消耗、淡水的使用所引起,如在冰区航行时不对称结冰也会对船舶姿态产生较大的影响。通常,调整船舶姿态及吃水的是通过人工对压载舱进行压载来实现的。当压载舱压满后(此时船舶吃水只能慢慢减少),则采用调换使用不同区域的油舱、淡水舱;或进行不同油、水舱间的调拨来实现船舶的姿态调整。但是受操船人员的意识及工作态度的影响,船舶吃水及姿态没有特别明显的偏差时,往往操作人员不会主动进行调整。这样无形中会增加船舶能耗,进而增加海上勘探成本。
国内近几年新建造的勘探船舶油水舱均安装有液位遥测装置,相应的管路上安装有阀门遥控装置,可以实现液位的远程时事监测,液舱使用及转换可以通过阀门遥控系统实现远程遥控操作,非常便捷。为了方便检查船舶吃水状况,在船舶左右舷侧及艏艉部均安装有吃水测量装置。
结合上述两方面综合考虑,勘探船舶上可在充分利用现有装置、不增加太大投入的前提下进行集成优化,通过加装一个中央控制单元便可形成一套适合勘探船舶使用的吃水及姿态调整系统。该装置可根据船舶艏、艉及舷侧安装的吃水测量装置感知船舶吃水及船舶姿态,据此并按照内置的算法对船舶进行压载水的压、排操作,燃油舱及淡水舱的调配使用,保证船舶姿态及吃水保持在适合的状态,从而保证船舶运营的经济性,降低生产成本。
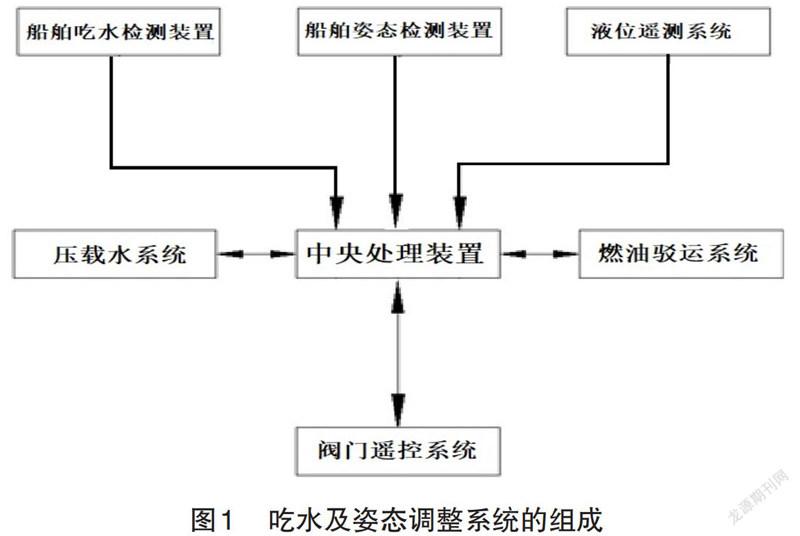
3.2 吃水及姿态调整系统的组成
图1为吃水及姿态调整系统组成。
其具体内容如下:(1)中央处理装置:包括控制、显示、报警等单元,用于控制、监测和显示系统的运行;(2)船舶吃水检测装置:用于检测船舶吃水状态;(3)压载水系统:设置有回流或旁通管路,管路上安装有可控制开度的遥控阀门;用于向压载舱压、排压载水;(4)燃油驳运系统:设置有回流或旁通管路,管路上安装有可控制开度的遥控阀门;用于不同燃油油舱间的燃油驳运;(5)阀门遥控系统:用于控制各液舱注入、排出。旁通管路开启和闭合用于控制液舱的转换及控制压载水、燃油和淡水打入和排出的速度;(6)液位遥测系统:用于检测各液舱的实际装载情况;(7)船舶姿态检测装置:用于检测船舶姿态,即船舶横倾和纵倾状况,可使用姿态传感器和倾角传感器。
3.3 工作原理及工作过程
3.3.1 工作原理
中央处理装置内的存储单元内存入正常运营中较为经济的吃水和姿态的数值,其是在保证船舶稳性、舒适性及作业安全的前提下得到的一个吃水范围值,是在船舶设计时规定/设定的。
横倾设定值为: ±1°进行油水舱转换使用;±1.5°系统进行压载或油水调驳操作。
纵倾设定值为:等于30或50cm时,进行油水舱转换使用;小于25或大于55cm时,系统进行压载或油水调驳操作。
根据各液体舱的容积和容积形心随液面高度变化的计算表(或舱容要素曲线图),包括液面不同高度时的体积及其形心坐标、及边舱的。将该舱容形心计算表中的不同舱容对应的形心距离纵轴距离和距离横轴距离提取出来,单独形成一形心力臂表,并将此表存储在中央处理装置的存储单元内。
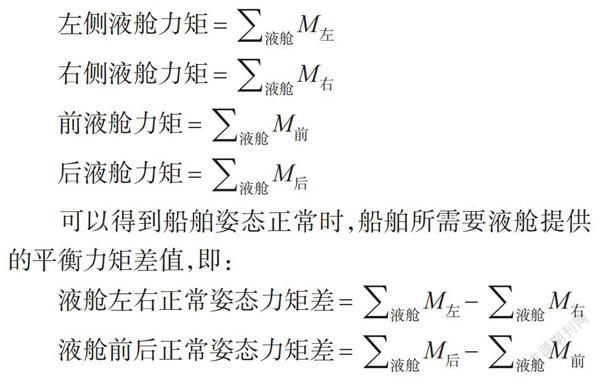
船舶每次补给完成后,在船舶姿态正常时,中央处理装置会根据液舱的液位、密度及形心力臂表计算出船舶中纵线左、右液舱对船舶中纵线的力矩,以及船中前、后液舱对船中的力矩,即:
随着油水消耗,船舶姿态出现超过或等于设定值的偏差时,系统会根据液舱的液位变化,计算出此时液舱的力矩差值与正常姿态时的力矩差值的变化量。结合各舱的液位、密度及形心力臂表计算,系统会按照3.3.2节中所述的调整逻辑规划出最佳的调整方案并据此方案进行调整。系统会依据调整方案所涉及的水泵、油泵排量,计算出调整所需的时间并显示在显示单元上。船舶姿态传感器和船舶吃水传感器会实时将测量数据反馈给中央处理装置,控制系统的启停。
勘探船舶的压载水系统和燃油驳运系统、船舶吃水检测装置、各液舱的液位遥测装置、阀控系统和船舶姿态传感器电连接到中央处理装置上,使其集成为一个自动控制系统,通过压载舱的压载和排出并辅以船舶油水液舱合理的调配使用,从而实现船舶吃水和船舶姿态的调整,保证船舶具有良好的船舶吃水及船舶姿态,是船舶具有良好操控性、舒适性的前提下,有效降低船舶能耗,节约勘探成本。
4 结语
随着科技的进步,船舶信息化、智能化水平大幅度提高是大势所趋,精细化管理要求我们要着眼于船舶的各个环节,找到能够降本增效、节能环保的好举措、好方法。
勘探船舶吃水及姿态调整系统考虑到勘探船舶现状,在不增加太大投入的前提下上,对船舶现有系统进行了有机的整合,实现了船舶吃水及姿态的自动控制和调整,有效地提高了船舶运行的经济性,燃油消耗量的降低对于海洋环境的保护也有重大意义。
参考文獻
[1] 李阳.螺旋推进式水下航行器结构设计与外形优化[D].青岛:青岛科技大学,2020.
[2] 戚可成,方剑益,曾向明,等.船舶吃水差优化的研究[J].中国水运(下半月),2019,19(4):10-12,14.
[3] 徐锋,刘志平,郑海斌,等.基于LS-SVM的船舶操纵运动在线建模[J].船舶力学,2021,25(6):752-759.
[4] 吴明,王骁,杨波,等.船舶几种浮态下阻力的数值计算方法[J].中国航海,2009,32(3):41-45
[5] 宫尚军,张磊,姚兴田,等.船舶泵控式抗横倾系统的设计与抗横倾验证[J].船海工程,2021,50(4):77-82.
[6] 卞泽坤,张少雄,孔祥韶,等. 针对全船结构直接计算的浮态计算方法研究[J].武汉理工大学学报:交通科学与工程版,2017,41(6):1013-1016,1021.
[7] 陈翔,张友林,万德成.MPS方法研究进展及其在船舶水动力学问题中的应用[J].哈尔滨工程大学学报,2018,39(6):955-972.
