基于瞬态信号特征的无人机数传电台识别研究
2022-06-14何先定王思源
田 园,文 红,何先定,王思源,唐 斌
(1.电子科技大学,四川 成都 611731;2.成都航空职业技术学院,四川 成都 610100)
近年来,随着民用无人机相关技术及产品的成熟,无人机已经广泛应用于巡线测绘、物流运输和航拍社交等领域。但部分无人机的非法使用,也暴露出一些安全隐患和管理漏洞,对社会公共安全和航空飞行安全构成了威胁。目前,针对低空无人机监管防御主要有雷达探测、光电探测和声音探测等方式,但仍存在探测识别率不高、受环境影响较大和探测距离不足等问题。
无人机和地面控制站之间的数据链是无人机执行任务必不可缺的系统组成,无人机通过数传电台在无人机地面站和无人机之间建立遥控遥测链路。其中遥控链路用于无人机地面站把无人机操控人员的各种控制指定发送到无人机平台,遥测链路用于无人机把飞机姿态、飞行参数和设备状态等发送给地面控制站。由于无人机数传电台的电子器件存在元件容差,导致实际硬件参数也会存在差异,使得每个无人机数传电台都具有射频指纹。射频指纹是发射机的独特原生属性,具有唯一性、时不变性、独立性和稳健性四种基本特性,可作为无人机数传设备识别的依据。
近年来,随着机器学习与人工智能的不断发展,国内外不少文献将众多机器学习算法应用到了无人机通信设备信号的识别中。经典的机器学习算法主要有基于距离模型的最近邻算法、基于概率模型的贝叶斯算法以及基于树模型的决策树算法等。文献[7]主要利用微型无人机遥控器的射频指纹对微型无人机进行检测和分类,该方法对噪声有较强的鲁棒性,采用K近邻算法分类的平均准确率达到96.3%。文献[8]提出了一种改进的基于射频指纹的无人机检测方法,采用频谱累积和统计指纹分析两种方法进行频率估计,以确定无人机是否存在于探测环境中。该方法在2.4 km内识别率接近100%,在3 km内识别率大于90%。文献[9]设计了射频信号分类工具箱,可用于无人机通信系统的射频信号探测、检测和分类,并讨论了如何使用软件无线电实现无人机探测和分类。文献[10]提出了一种基于软件无线电的民用无人机无线电信号检测、分类和分析系统,重点介绍了机器学习技术在无线电信号分类中的应用,提出了实现信号检测分类的方法。文献[11]提出了一种通过对WiFi网络进行指纹统计分析来检测消费级无人机信号的方法,并验证了方法的有效性。相关文献研究中主要是通过信号采集设备对无人机遥控器信号(含Wi Fi)进行接收处理,再利用机器学习算法将采样获取的数据进行识别。无人机遥控器信号都是在目视飞行操控下使用,而在远距离飞行时无人机通常是以数传设备通信为主。因此本文重点对无人机数传设备的射频指纹识别开展研究,完善无人机射频信号识别方法,同时提出一种基于特征贡献度的加权KNN优化算法,以提升无人机数传设备射频指纹识别性能。
1 系统模型
无人机数传电台的射频指纹可以唯一表征无线发射设备,并且具有难以克隆的特性,因此可以准确实现对无人机信号的识别。无人机数传电台射频指纹识别包括射频指纹数据库建立和射频指纹识别处理。射频指纹数据库建立是针对已知无人机数传设备,通过软件无线电设备采集射频信号,利用信号处理算法提取信号特征,将反映数传电台射频特征的数据向量与相应设备对应,生成射频指纹数据库。射频指纹识别处理是采集无人机数传设备信号,生成待识别信号的射频指纹特征,利用机器学习算法将待检测的射频指纹特征与指纹数据库中的特征进行相似性的比较,从而得到该射频特征所对应的设备编号。无人机数传射频指纹识别系统模型如图1所示。

图1 无人机数传射频指纹识别系统模型
在无人机数传通信中,瞬态信号是指信号发射功率从0到达额定功率或从额定功率回到0的信号部分,这部分信号具有射频指纹特征。在实际通信环境中,通信信号往往会受到多分量信号和环境噪声干扰,实际信号会产生幅度失真。可将接收到的信号表示为:

式中为发射设备实际的工作频率。对()进行基于发射设备标准工作频率的下变频,降低信号载波频率得到基带信号():

式中,Δ是发射设备与接收设备的频率偏差,并不影响中频复信号()的包络 ||(),因此可以将 ||()作为无人机数传电台的信号特征进行处理。
2 无人机数传电台瞬态信号识别算法
2.1 射频信号采集
Pixhawk/APM是目前开源无人机研究和应用领域广泛使用的软硬件平台。本文基于Pixhawk/APM的平台,结合SiK系列数传电台和Mission Planner地面站软件搭建无人机数传电台信号采集环境。多旋翼无人机试验平台如图2所示。

图2 多旋翼无人机试验平台
通过USRP X310软件无线电设备和UBX-160射频子板,在GNU Radio环境下建立信号流程图,对无人机数传电台设备进行信号采集,将采集到的信号进行数字化表示,转化为维信号,得到=[,,…,x]。
2.2 瞬态信号包络提取
无人机数传信号采样完成后,需要从采样数据中提取出瞬态信号用于后续处理分析。采集的无人机数传信号开端为信道噪声等,其短时能量值较小。瞬态信号起点之后短时能量值开始出现波动,瞬态信号提取分为粗定位和精对准两个步骤。瞬态信号粗定位基于短时窗口能量差方法检测信号能量的突变区间;瞬态信号精对准需要确保每个提取瞬态信号的起始点位置对准,以便后续对瞬态信号样本的特征处理分析。图3为根据瞬态信号提取方法,在Matlab R2017a平台上从数传电台信号中提取的5个512维的瞬态信号,验证了瞬态信号提取方法的准确性。

图3 无人机数传电台的瞬态信号
2.3 瞬态信号特征提取
小波变换能对时间-频率进行局部化分析,通过伸缩平移运算对信号逐步进行多尺度细化,能自动适应时频信号分析的要求。小波多分辨率分析是利用阶层架构进行离散小波变换的过程,令:[]为离散的输入信号,[]为低通滤波器,[]为高通滤波器,x[]表示级多分辨率分析后的高频部分,x[]表示级多分辨率分析后的低频部分。则多分辨率分析的第层得到的低频部分和高频部分可以表示为:


小波多分辨率分析是通过伸缩和平移等运算功能对信号进行多尺度细化分析,可以更加精确地对信号特征进行局部描述,并实现信号特征的分离和提取。图4是对采集得到的512维瞬态信号在Matlab R2017a平台上按照3级Haar小波分析处理后得到的64维小波特征。
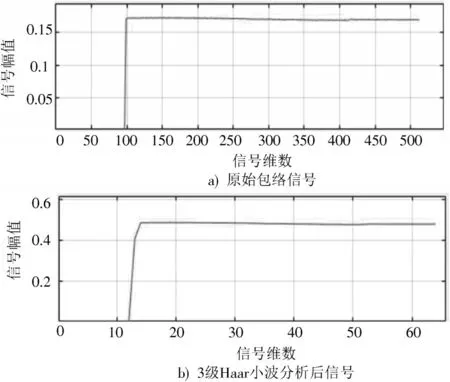
图4 3级Haar小波特征提取
2.4 加权KNN算法优化
K-近邻算法(K Near Neighbor,KNN)是通过测量不同特征值之间的距离进行分类,将测试样本的特征与训练样本对应的特征进行相互比较,在训练集中找到与之最为相似的前个样本,则该测试样本对应的类别就是个样本中出现次数最多的类别。KNN依据个对象中占优的类别进行决策,一般使用欧氏距离计算样本特征值之间的距离。维空间点(,,…,x)与(,,…,y)间的欧氏距离计算方法为:

欧氏距离忽略了特征向量中特征属性与分类强弱的关系,在对不平衡数据集进行分类时,分类判决会倾向于多数类,导致分类性能下降。此外,传统加权KNN算法是为每个点的距离增加一个权重,使得距离近的点可以得到更大的权重。但在分类时,没有考虑每个特征在样本区分中贡献的差异性。因此本文在传统加权KNN算法基础上,提出一种基于特征贡献度的加权KNN优化算法,以提高无人机数传信号的识别准确性。优化算法主要步骤为:
输入:瞬态信号训练样本集合={…,X},每个样本的数据为维,测试样本数据为Y;
过程:
1)将的每一列(代表一个特征属性字段)进行零均值化;

3 实验测试与分析
3.1 射频指纹识别正确率测试
无人机数传电台测试设备如图5所示。实验测试中分别对配置6个不同数传电台的无人机进行信号采集,其中数传测试电台分为3种类型,每种类型2个设备。测试中个体识别指每个单独唯一的无人机数传设备识别,类型识别指同一生产厂商的同一型号无人机数传设备识别。

图5 无人机数传电台测试设备
在Matlab R2017a平台上,每个设备提取150个瞬态信号,在=11的条件下,采用基于特征贡献度的加权KNN优化算法选择5折交叉验证,使用64维3级Haar小波特征进行瞬态信号识别正确率测试,每种测试结果进行10次取平均值。图6为小波变换系数作为识别特征的混淆矩阵。结果表明,个体识别平均正确率为87.9%,类型识别平均正确率为92.8%。
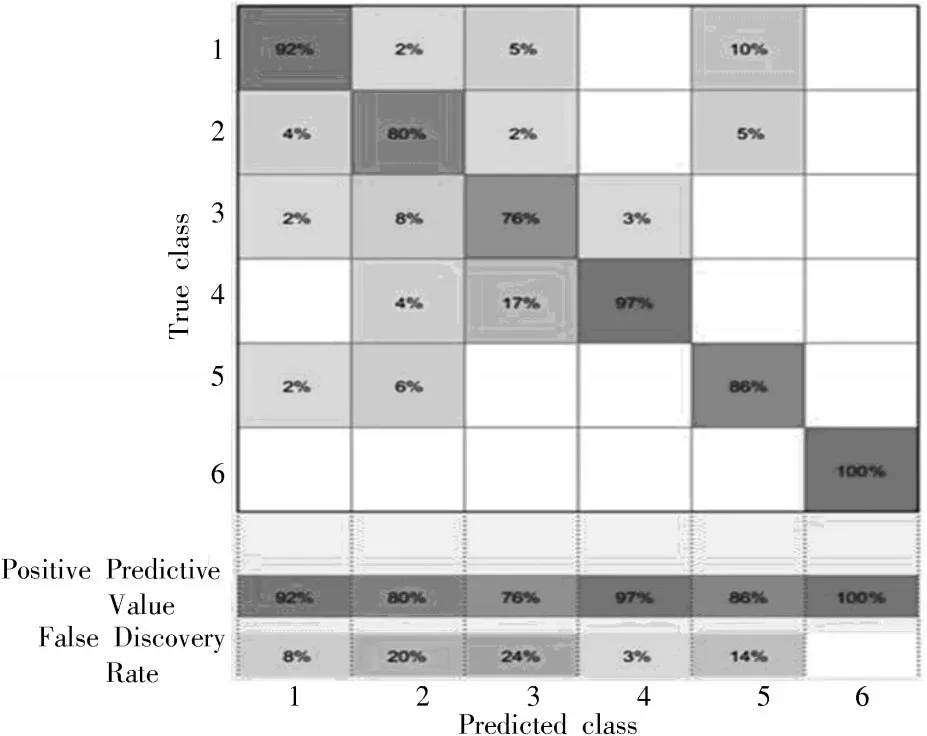
图6 Haar小波特征识别混淆矩阵
同时为了验证本文提出的基于特征贡献度的加权KNN优化算法性能,将该算法的识别性能与Matlab机器学习工具箱中的KNN算法识别性能进行了对比测试。图7为两种算法在相同特征参数下的识别性能测试对比。测试结果表明,本文提出的优化算法针对无人机数传设备射频指纹具有更好的识别性能。
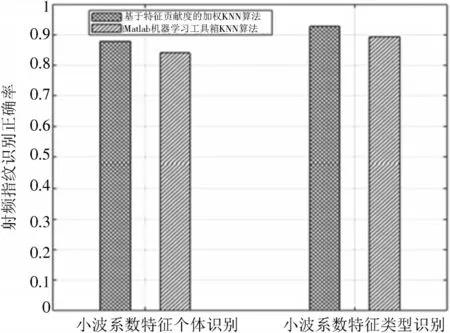
图7 KNN算法识别性能对比
文献[7-8,11]中多种无人机遥控器信号分类识别正确率在90%以上,但这些研究都是针对不同类型遥控器信号识别。由于不同类型遥控器生产厂商和使用硬件不同,射频信号存在较大差异,因此具有较高的识别性能。文献[15]研究结果表明,随着无人机遥控信号类型的增加,信号识别正确率从99.7%(2类射频硬件)下降到84.5%(4类射频硬件),可见无人机射频信号的差异性对识别正确率有很大影响。文献[7-8,11]只是针对无人机遥控器信号的射频指纹识别,而本文是针对典型无人机数传电台射频指纹识别开展研究。通过实验测试表明,利用本文提出的无人机数传设备射频指纹识别方法,能够实现87.9%的个体识别正确率和92.8%的类型识别正确率。
3.2 K值影响分析
作为KNN算法输入参数的值,其较大易引起欠拟合,模型的复杂度会下降;较小则容易过拟合,模型复杂度较高。在选择不同值条件下,加权KNN优化算法瞬态信号识别正确率如图8所示。图中数据是进行了10次实验后得到的平均值,值取值范围为1~25,按照步长为2进行选择设置。

图8 不同K值下的个体识别正确率
在等于13时,基于加权KNN优化算法的瞬态信号个体识别正确率达到88.7%;当值大于13后,个体识别正确率趋于稳定;在值小于13时,预测结果对近邻样本点敏感,容易发生过拟合。
4 结 语
本文针对采用开源飞控的消费级无人机探测识别问题,提出一种利用无人机数传电台射频指纹进行无人机探测识别的方法。实验结果表明,本文方法对无人机个体识别平均正确率可达到87.9%,类型识别平均正确率可达到92.8%。与Matlab机器学习工具箱中的KNN算法相比,本文提出的基于特征贡献度的加权KNN优化算法有更好的识别性能。同时也说明该方法对采用开源软硬件平台无人机识别有效,能够弥补现有雷达、可见光、红外等无人机探测方式的不足。
