运动平台磁悬浮直线同步电动机驱动系统RBF-PID 自学习控制的研究*
2022-06-13彭敬淇蓝益鹏
彭敬淇 蓝益鹏
(沈阳工业大学电气工程学院,辽宁 沈阳 110870)
传统“旋转伺服电动机加滚珠丝杠”的机床进给系统,由于存在传动链引起的误差,很难满足对高速高精加工的需求[1-2]。为了克服传统旋转电动机的缺点,改善零件的加工质量并提高生产的效率,许多数控机床采用高速高精的直线伺服驱动系统,但直线电动机驱动系统中的动子滑块与静止导轨之间存在着摩擦严重影响系统的使用寿命和直线伺服驱动系统的性能[3]。
磁悬浮直线同步电动机最早在磁悬浮高速列车上得到应用,因为采取了直流电励磁的方式,有功率因数高的优势,并通过调节励磁电流if使电动机的动子悬浮于导轨之上[4],从根本上消除了非线性摩擦对系统的影响,抑制了电动机的温升,有效提高了直线电动机的控制性能和定位精度,并采用id=0的控制方式,使磁悬浮直线电机的控制难度降低。
由于磁悬浮直线电动机是一个典型的的非线性系统,并存在外部不确定性扰动,从而使系统控制变得困难,论文设计一种基于RBF 神经网络PID自学习控制器。可以有效解决直线同步电动机在运行过程中存在的上述问题[5]。RBF 网络学习规则简单、易于计算机程序的实现,并能保证系统的稳定性,能映射任何复杂的非线性函数关系[6-7]。因此,论文设计RBF-PID 自学习控制算法,通过MATLAB软件对该控制策略进行仿真,与PI 控制器进行比较,验证了此控制算法的有效性。
1 磁悬浮直线同步电动机结构及运行机理
直线同步电动机进给平台结构主要有2 个组成部分:运动平台和磁悬浮同步电动机,如图1 所示[8]。

图1 磁悬浮直线同步电动机进给平台结构
运动平台固定在动子铁心上,直流电流通入定子铁心中的励磁绕组,运动平台与导轨间隙之间的励磁磁场恒定,动子铁心与励磁磁场产生单边磁拉力,通过调节励磁电流if大小进而改变悬浮力大小,当平台重力与磁拉力等效时,进给平台能够稳定悬浮。在电枢绕组中通入对称的三相交流电,以产生在气隙中一个正弦规律变化的行波磁场,在励磁磁场与行波磁场相互作用下,产生水平的电磁推力,平台受电磁推力作用下沿水平方向运动[9]。
2 磁悬浮直线同步电动机的数学模型
两相旋转坐标系dq轴的电压方程为[10-12]


式中:ud、uq、id、iq为推力绕组在dq轴系下的输入电压与电流;uf与if为励磁电压和励磁电流;Rs与Rf为推力绕组的电阻和励磁绕组电阻;τ为电机的极距;v为电机运行速度。
磁链方程为

式中:ψd、ψq为推力绕组在dq轴系下的磁链;ψf为励磁磁链;Lmd、Lmq为直轴与交轴主电感,Lσ为推力绕组的漏电感;Lσf为励磁绕组的漏电感。
电磁推力方程为

式中:Ld为直轴电感,Ld=Lmd+Lσ;Lq为交轴电感,Lq=Lmq+Lσ。
采用id=0的控制策略,此时式(7)化简为

从式(8)可以看出水平电磁推力不仅受电枢电流iq影响,还受励磁电流if影响,当直线电动机稳定运行时,if值恒定不变,可视为常数,此时式(8)可简化为

式中:Ke为电磁推力常数,由此可得出

可得出磁悬浮直线同步电动机的水平运动方程为

式中:M为直线电动机动子和平台质量;v为平台运动速度;负载阻力为FL。
3 RBF-PID 自学习控制器的设计
3.1 RBF 神经网络
神经网络能把复杂的信息概括成某种简单的模型,通过调整权值把各个神经元连接起来,达到并行处理信息的目的、并模拟输入与输出之间的关系。由于RBF 网络有很强的非线性函数逼近能力,被广泛地应用在非线性控制系统中。并且跟BP 网络相比不存在局部极小的问题,逼近精度也优于BP[13],因此被广泛地应用在众多领域。图2 为最基本的RBF 网络结构图。

图2 RBF 神经网络结构
输入向量为

隐含层的激活函数取高斯基函数

选取高斯基函数作为网络的激活函数是因其表达形式简单,便于理论的分析,同时易于计算机编程的实现。
第j个节点的中心向量为

节点基宽为

权值向量为

RBF 网络的输出为

3.2 RBF 神经网络PID 自学习控制器的设计
网络是一种性能优异的前馈网络,拥有强大的容错能力,具有非线性映射性和并行处理信息的能力。将其作为辨识器在线识别控制对象的雅克比信息,将雅克比信息提供给PID 控制器,对PID 的3个参数进行实时的调整,从而使PID 的控制算法有了自学习的能力,图3 为RBF-PID 控制结构图。

图3 RBF-PID 控制结构
首先,为了便于控制器的设计,对公式(11)离散化,得

根据离散后的方程可得RBF 网络的输入向量为

式中:v(k)为 速度信号;iq(k-1)为电流信号。
RBF 网络的目标函数取为

在训练过程中,参数c、b、w,一般采取梯度法进行迭代计算[14]。此方法仅考虑了k时刻的参数变化,训练过程中容易引起收敛速度变慢,因此论文在传统梯度法的基础上引入动量因子项,迭代算法如下。

根据改进的梯度下降法可得权值的调整为

高斯基函数的宽度和节点中心的调整公式为

参数w、c、b在调整过程中,η和α可以设置为不同的数值。
当学习速率 η过大时,会引起系统振荡的问题,引入动量因子项 α的梯度算法可以克服该问题,当权值w调整过快时,引入动量因子项会使调整量减小,进而确保结果是随着参数收敛的方向进行的[15]。论文引入动量因子项 α后,使RBF 网络的学习速率以及收敛速度变快,使系统的振荡减小。
在调整w、c、b的过程中,由于梯度法和前一次修正量所占的比例受动量因子项取值的影响。因此,应当选取合适的动量因子项。在确定 α的取值时,要进行误差判断,取值情况如下。

经过RBF 神经网络辨识,得到磁悬浮直线电动机的雅克比信息,雅克比信息也就是被控对象的输出对输入的灵敏度信息。

其中:x1=Δiq(k)。
PID 参数的自学习采用梯度法,本文选用增量式的PID 控制器,则控制的误差为

PID 控制器的3 个输入分别为

增量式PID 的控制算法可描述如下。

PID 的性能函数指标为

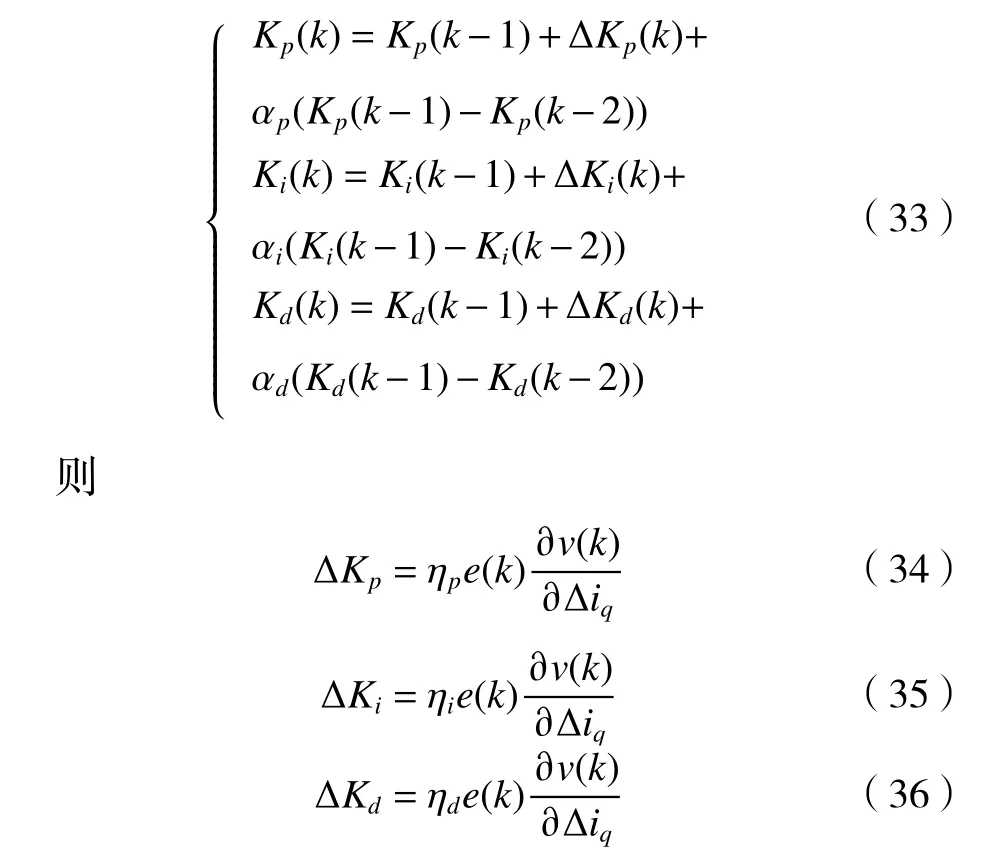
则PID 的3 个参数自学习的算法采用梯度法如下。
4 仿真研究
4.1 控制系统框图
如图4 所示为磁悬浮直线同步电动机控制系统框图。速度环采用RBF-PID 自学习控制器,电流环采用PI 控制器,则控制器的输入为给定值v*,以及给定值与实际值之间的误差v*-v,控制器的输出为给定值。
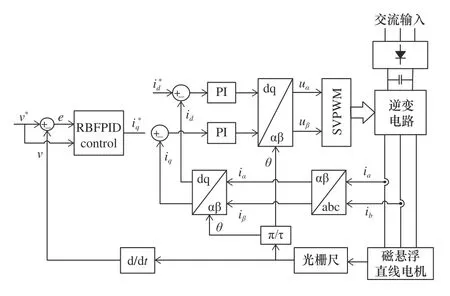
图4 磁悬浮直线电动机控制系统框图
4.2 控制系统的仿真与分析
为了验证本文RBF-PID 控制算法的有效性,在MATLAB/Simulink 下建立磁悬浮直线同步电动机控制系统的仿真模型,如图5 所示。对RBF-PID自学习控制器进行仿真建模,用 m文件编写控制电动机的程序,并放入sfunction 模块中,与 PI控制器进行对比。

图5 磁悬浮直线同步电动机仿真图
磁悬浮直线同步电动机的仿真参数设置为:直轴和交轴电感Ld=Lq=0.018 74 H,直轴主电感Lmd=0.009 5 H,电阻Rs=1.2 Ω,极距 τ=0.048 m,电磁推力常数Ke=46.633,极对数为Pn=3,电机动子和平台的质量之和M=10 kg ;励磁电流if=5 A。两个电流环PI 控制器的参数设置分别为:Kpd=20,Kid=800,Kpq=16,Kiq=500。RBF 辨识器网络的结构选取为3-6-1,如图6 所示,η=0.2,α=0.95,PID 控制器三个参数的初值设置为:Kp=60,Ki=8;Kd=6,采样时间为T=0.001 s,仿真时间为1 s。

图6 RBF 神经网络辨识器结构
当空载运行时,给定电动机的运行速度为v*=1 m/s,不加负载阻力,不改变直线同步电动机的参数,观察系统的性能。
如图7 所示,系统在 PI控制下存在较大的超调量,超调量为11.9%,其调节时间为ts=0.12 s,而在 RBF-P ID控制器的作用下,超调量较小,其超调量为2%,调节时间为0.08 s。

图7 不加负载时的速度响应曲线
当系统稳定运行时,在0.2 s 时刻加一个50 N的负载扰动,观察系统的速度v响应曲线,电磁推力Fe响应曲线,电流id、iq响应曲线,如图8~10 所示。
由图8 可知系统在PI 控制下动态速降为7.8%,其恢复时间为0.087 s,而在 RBF-P ID自学习的控制下动态速降为2.6%,恢复时间为0.06 s,因此,可看出 RBF-P ID自学习控制器的稳态及动态性能都优于PI 控制器,有较好的抗扰动能力。

图8 负载扰动下的速度响应曲线
由图9 可知,在 RBF-P ID控 制下,当0.2 s 负载发生变化时,电磁推力大约在0.27 s 跟踪上负载变化,而PI 控制下,电磁推力大约在0.34 s 跟踪上负载变化,相比较PI 控制,RBF-P ID控制下的电磁推力跟踪负载扰动的变化比较快。

图9 负载扰动下的电磁推力曲线
由图10 可知,在 RBF-P ID控 制下,iq的响应速度优于PI 控制器,且超调量较小,电枢电流到达稳定比PI 控制系统所需时间较短稳定速度较快,由此说明 RBF-P ID自学习控制器较PI 控制系统来说,稳定时间、系统响应速度都比较快,有更好的鲁棒性。

图10 电流iq 响应曲线
突加负载时,PID 的3 个参数的自学习变化曲线如图11~13 所示。可看出3 个参数在RBF 网络的整定下,参数发生了突然的变化,从而实现对磁悬浮直线同步电动机的自适应控制。因此可以说明,和常规的PI 控制器相比,RBF-PID 自学习控制算法,能有效地减小电动机在工作过程中遇到负载扰动变化时所带来的影响。

图11 参数Kp 自学习曲线

图12 参数Ki 自学习曲线

图13 参数Kd 自学习曲线
5 结语
(1)为了改善运动平台磁悬浮直线同步电动机驱动系统控制过程中存在的问题,并提高其优异特性,论文提出了一种RBF-PID 自学习的控制算法。
(2)首先对磁悬浮直线同步电动机的水平运动方程进行离散化处理,得到RBF 网络的输入,选取RBF 网络的目标函数,在梯度下降算法中引入动量因子项进行网络参数的整定,将RBF 网络当做辨识器,实时地跟踪被控系统的变化,通过把被控对象的雅克比信息传递给PID 控制器,从而进行PID 参数的在线学习校正。
(3)为了达到更好的控制精度,提高系统的性能,不断地试验网络的各个参数,包括η、隐层神经元个数、α等。最终得到1 组较为优良的网络参数,并通过仿真测验,仿真结果表明,RBF-PID自学习控制算法有更好的鲁棒性和抗扰动性。