水下机器人移动路径智能规划系统
2022-06-12王欢
王 欢
(南京工程学院机械工程学院,江苏 南京 210043)
引言
智能制造是新一轮科技革命的核心,也是制造业数字化、网络化、智能化的主攻方向。智能制造在我国获得了快速发展的新契机,已成为我国现代先进制造业新的发展方向。新常态下,有过制造业辉煌的江南智能制造业,当前应对以数字化制造和网络化组织为主要特征的新工业革命,是江南智能制造业的重大历史课题。机器人的研发、制造、应用是衡量一个国家科技创新和高端制造业水平的重要标志。江南智能制造业全面把握制造行业发展现状,迎接智能制造时代浪潮,进一步促进传统制造业转型升级,对实现经济又好又快发展具有重要意义[1]。
政府引导,企业、高校和科研院所联合,建设一批机器人产业控制技术、驱动技术、传动技术和传感通讯技术等共性技术研发平台,推进机器人产业升级协同发展。强化机器人共性技术标准研制提高国际标准转化率。
传统水下机器人移动路径规划系统,采用固定输入模式,利用载入离线地图的方式,进行路径的规划[2]。当行至复杂水域,或为能够提前获得准确的离线地图,水下机器人移动存在较大的安全隐患,具体表现为无法到达目的地,行驶较远距离到达目的地,移动过程中与其他障碍物产生刮碰等现象,存在移动路径规划不准确的不足,为此提出水下机器人移动路径智能规划系统。基于水下机器人路径智能规划系统整体结构设计,依托超声波技术,设计路径识别空间三维传感器,完成了其硬件设计,依托水下障碍物的三维识别过程设计,和路径智能规划算法设计,完成了其软件设计,实现水下机器人移动路径智能规划系统设计。为了保证设计的水下机器人移动路径智能规划系统的准确性,模拟障碍物基本形态,进行仿真试验验证,试验结果表明,提出的水下机器人移动路径智能规划系统具有较高的准确性。
1 水下机器人移动路径智能规划系统硬件设计
1.1 水下机器人路径智能规划系统整体结构设计
水下机器人路径智能规划系统是嵌入水下机器人内部的一种执行系统,为机器人判断路径,选择正确的路径,到达目的地。从水下机器人路径智能规划系统整体上看,硬件结构可分为4个部分,即控制中心、时基分析器、示波器、检波器、路径识别空间三维传感器,如图1所示。
控制中心存放控制算法、识别算法等,通过数据的调取与分析,判断传感器前是否存在障碍物,并发出水下机器人的是否移动命令[3]。控制中心是水下机器人路径智能规划系统的中央管理机构。
路径识别空间三维传感器,是通过压电晶片发出超声波,利用超声波干涉和衍射的现象,判断传感器前端是否存在障碍物。路径识别空间三维传感器是水下机器人位移路径智能规划系统的门户机构,在下一节,将系统分析路径识别空间传感器的设计。
检波器是对路径识别空间三维传感器,获得的反射波进行辨别,确定是否为障碍物,将判断的结果,传输至示波器与控制中心,控制中心对水下机器人位移路径进行控制,也可通过控制人员依据示波器显示,人为的判断是否为障碍物,进行人为的控制[4]。
时基分析器,是水下机器人路径智能规划系统的时间机构。由于路径识别空间三维传感器发射超声波,和接收设备进行接收超声波,再到分析超声波数据,再到命令的传输,需要对时间的控制,以及对原有时间所行驶的位移,进行一定的预判,所以时基分析器尤为重要[5],时基分析器是衡量水下机器人移动路径智能规划系统能否正常运行的核心机构。在执行水下机器人位移指令前,工作人员应对时基分析器进行有效的校验,防止因数据不准确而造成位移规划不准确的现象。
1.2 路径识别空间三维传感器设计
路径识别空间三维传感器是水下机器人位移路径智能规划系统的重要组成部分。该传感器是用来显示传感器前方是否存在障碍物的执行机构,与常规传感器不同,路径识别空间三维传感器是针对水下机器人路径识别特殊设计,能够三维地显示水下机器人前端是否存在障碍物,并且能够判断出前端一定距离是否存在障碍物,与声呐技术相似,其设计的路径识别空间三维传感器结构图如图2所示[6]。
图2中,1代表路径识别空间三维传感器的外壳,为保证一定的强度通常选用S32205型双相铁素体奥氏体不锈钢制成。在强碱环境中选择聚碳酸树酯制成。2代表晶片调节质量块,晶片调节质量块的目的是,通过不断调整质量块的重量,改变不同的压电晶片发射频率[7],从而获得不同能力的超声波,用于近处识别以及远处识别。3代表电极夹成,与5引线相连接,控制路径识别空间三维传感器的运行,连接压电晶片与质量块,提供必要的电能,使之正常工作。
4代表压电晶片,是产生超声波的原件,压电晶片通过高频振动,产生不同频率的超声波,用于发现前端是否存在障碍物,而压电晶片产生超声波的频率,是由2质量块所决定的。6代表超声波反射接收装置,与4不同,4为产生并发出超声波的装置,而超声波反射接收装置是,根据发射的超声波打在障碍物体上,障碍物体反射超声波,通过识别反射的超声波大小,反射超声波的面积,而确定障碍物的大小。
5代表引线,引线是连接水下机器人路径智能规划系统的传输装置,将路径识别空间三维传感器所获得的数据,发送至控制中心,控制中心根据控制算法、识别算法对水下机器人的位移路径进行控制,从而完成其水下机器人位移路径智能规划系统的硬件设计。
2 水下机器人移动路径智能规划系统软件设计
水下机器人移动路径智能规划系统软件设计,主要包括障碍物三维识别过程设计,移动路径智能规划算法设计两部分。
2.1 水下障碍物的三维识别过程设计
水下障碍物三维识别过程设计是其路径智能规划系统软件的程序设计。通过确定识别水下障碍物的流程,利用计算机计算的优势,进行不间断的数据计算,当发现障碍物时选择科学的避让方式,使水下机器人顺利的到达目的地,其水下障碍物的三维识别过程如图3所示。
当路径识别空间三维传感器发射出超声波时,超声波识别装置进行识别,若超声波,未能识别到回波,则代表该三维传感器前无障碍物,一个单独行进的水下机器人,上下左右至少安装6个三维传感器,以保证能够全面的获取水下障碍物信息。若超声波识别装置能够识别出回波,那么根据检波器和示波器确定反射超声波的频率和有效波长。
超声波具有波动性,存在干涉和衍射的现象,水下机器人不同方向的三维传感器,发射不同的超声波,不同的超声波间存在干涉和衍射,根据水的深度确定超声波的发射频率,一般介于2.5~5 MHz之间。当识别的超声波,频率远远低于2.5 MHz,则说明该回波为非障碍物反射回波。如果识别的超声波,频率远大于5 MHz时,需判断干涉现象产生的干扰频率后再进行分析。若确定该波为干扰波,则认定三维传感器前无障碍物,若认定非干扰波则进行,障碍物的计算,根据障碍物的计算规划出合理的避让路径。其障碍物的计算主要依托于水下机器人移动路径智能规划算法设计进行计算。
2.2 水下机器人移动路径智能规划算法设计
水下机器人移动路径智能规划算法主要涉及三个部分,首先是对障碍物与水下机器人的距离确定,确定障碍物与水下机器人的有效距离,三维传感器压电晶片直径x是为控制中心提供避让路径所需的重要参数,其中计算公式,可用公式(1)表示[8]:
式中:f代表超声波接收装置所接收到的频率,MHz;ak代表示波器所显示的波长,nm;x代表设计的三维传感器压电晶片的直径,mm;τk代表三维传感器发射超声波与发射超声波所获得的角度,°。
根据获得障碍物与水下机器人的有效距离,判断障碍物的基本形状,避免与水下机器人产生刮碰。超声波接收装置所接收到的超声波会随障碍物的体积增大而增大,并且障碍物是一个封闭的物体,根据反射波形状可确定一个二维的闭环函数,由于超声波不具有穿透性,所以水下机器人位移路径选择控制中心,可获得一个平面的障碍物曲线,如公示(2)所示:
式中:ρ代表反射波压强,MPa;σ0代表反射波弧度,°。同理,根据水下机器人的试探性运动,确定不同障碍物之间的关系,发现某障碍物与另一障碍物之间,存在可以驶过的距离,则水下机器人选择有效的路径进行移动。当发现周围均为障碍物时,可根据记忆系统,快速回退至上一分叉路口,重新选择,直至水下机器人到达目的地。完成了水下机器人移动路径智能规划系统设计。
3 仿真实验
为了保证设计的水下机器人移动路径智能规划系统对有效性,进行仿真试验,试验过程中选择传统的水下机器人移动路径规划系统作为对比对象,验证水下机器人移动路径智能规划系统的准确性。
3.1 数据准备
实验数据的准备主要包括模拟水下复杂试验环境,模拟两种不同的路径规划系统指挥水下机器人进行移动。根据模拟不同复杂的实验环境,分析两种路径规划系统的水下机器人,到达目的地的所用时间,以及是否与障碍物产生刮碰。
模拟的水下复杂实验环境包括,海藻、移动的鱼类、起伏不定的海床、以及其他障碍物。其大小包括0.1 D~10 D(D为水下机器人最大截面长度)。
3.2 实验过程
实验共分为三个过程,其一为水下机器人水中潜伏路径规划实验,其二为水下机器人水底位移路径规划实验,其三为水下机器人水面水中水底复杂路径位移规划实验。实验过程中水下障碍物系数作为自变量,判断两种水下机器人路径规划系统的规划准确性。
水下障碍物系数R是水下障碍物的总体积占所模拟的总环境总体积(包含障碍物体积以及水的体积)之比,如公式(3)所示:
式中:V1代表水下障碍物的总体积,m3;V2代表水的总体积,m3。即水下障碍物系数越大,水中障碍物越多,水的体积越少,水下机器人需要避开的障碍物越多。
本次模拟的水下环境(包含障碍物体积以及水的体积)共100 m3,水下障碍物系数最大为0.8(当水下障碍物系数大于0.8时,不能保证模拟的水下环境,存在一条有效的到达目的地路径),障碍物中海藻、移动的鱼类、起伏不定的海床、以及其他障碍物的体积比为1∶1,障碍物为均匀分布。
实验过程中,首先将两种水下机器人位移路径规划系统载入仿真软件,按照设定的障碍物系数进行水中潜伏路径规划、水底位移路径规划、水面水中水底复杂路径位移规划仿真实验。将在同一障碍物系数下,同种路径规划实验下,记录到达目的地所用时间,得出两种水下机器人位移路径规划系统,的规划准确性。
3.3 实验结构分析
根据实验过程的设定,进行仿真实验,得出两种水下机器人移动路径规划系统的所用时间数据表,如表1所示。
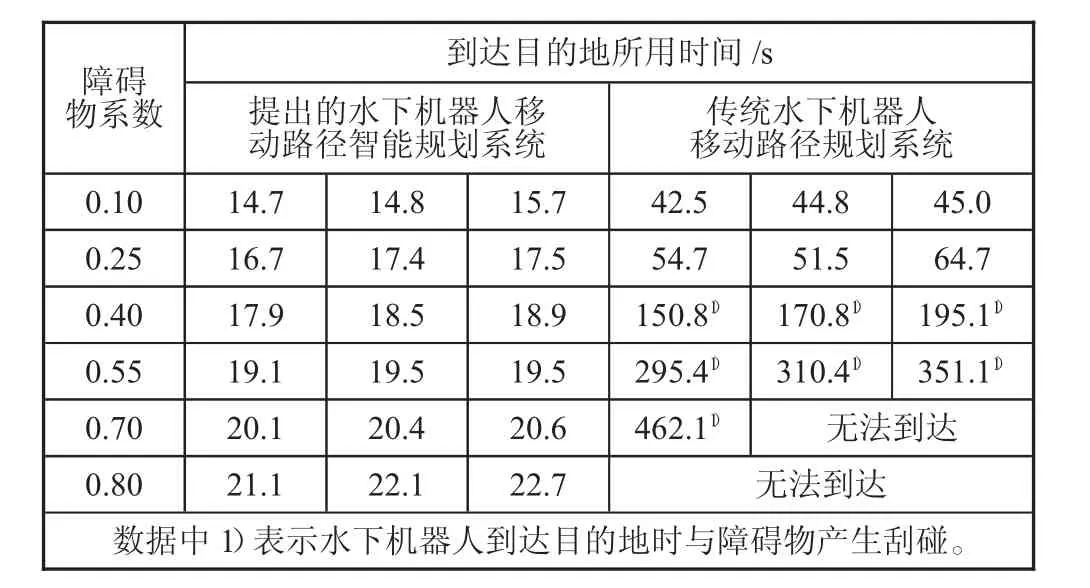
表1 实验数据表
从上表中可以看出,提出的水下机器人,移动路径智能规划系统,受障碍物影响较小,在障碍物较多时也能够绞快速的实现到达目的地。而传统水下机器人位移路径规划系统,在障碍物达到一定数量时,到达目的地所用时间会急剧增加,同时会伴随着水下机器人与障碍物发生刮碰的现象,当障碍物系数为0.8时,传统的水下机器人移动路径规划系统以无法指挥水下机器人到达目的地。
根据得到的到达目的地所用时间,进行路径规划准确性计算。水下机器人路径规划准确性B计算公式,如公式(4)所示:
式中:W代表障碍物系数;Q代表到达目的地所用时间,s,若无法到达目的地,则Q为正无穷;n代表试验次数;c代表初始状态值。
将实验参数代入路径规划准确性计算公式中,得出传统水下机器人移动路径规划系统的规划准确率为37.42%,提出的水下机器人移动路径智能规划系统规划准确率为87.43%,从而得出提出的水下机器人移动路径智能规划系统,较传统方法规划准确率提高50.01%。因此,该系统适合复杂水域的水下机器人移动路径智能规划。
4 结语
基于水下机器人移动路径智能规划系统的硬件设计,与软件设计,实现了提出的水下机器人移动路径智能规划系统设计,试验数据表明,设计的智能规划系统具有较高的规划准确性,希望本文的研究,能够为水下机器人移动路径智能规划系统设计提供理论参考。
