城市道路交通主动控制系统与模型设计
2022-06-11张立立姚迪王芳李晶赵琦于沛
张立立 姚迪 王芳 李晶 赵琦 于沛
0 引言
作为理论与技术创新应用的重要领域,城市道路交通长期得到国内外学者的关注,其中城市道路交通控制作为保障居民出行安全、出行效率和出行舒适度的主要措施更是成为该领域研究的重点[1].智能交通控制系统是实现先进交通控制算法、缓解交通拥堵的重要支撑[2].以SCATS[3]、SCOOT[4]为代表的国外交通控制系统已经发展几十年,并已广泛应用.国内智能交通控制系统的研究主要集中在控制方法层面,形成了三类典型交通控制研究方向:以现代控制理论为基础,以交叉口为被控对象构建数学模型,利用控制理论中的经典方法进行控制被称为基于模型的交通控制[5-7];交通系统的复杂性导致以交叉口为核心的被控对象的数学模型难以有效构建,所以数据驱动的思想被引入交通控制领域,即利用系统的输入输出数据实现控制与决策[8-9];城市交通控制的建模复杂性、数据种类和规模丰富性和交通拥堵的迫切性为人工智能技术的应用提供了场景支撑,基于人工智能的交通控制理论与方法被提出并逐渐成为主流[10-11].考虑到道路交通的“时间线上‘车占用物理空间’这一‘实体资源问题’”[12]从未改变的本质情况,城市道路交通控制归根到底是一个对道路时空资源分配的控制问题.上述三类典型交通控制大多建立在传统被动交通控制理论基础上,以相位、周期、绿信比为变量进行交通流的被动适应性控制,难以实现对道路时空资源的有效分配.为此,以提前性、预防性和主动性为特点,以预测交通流作为未来控制方案的研究对象,根据交通流形态实现控制策略的理念,研究人员提出了主动交通控制的概念[13-14].
主动交通控制大多处在理论研究层面,实际系统开发和应用层面较少[15-16].基于传统被动交通控制的系统如HT-UTCS系统[17]采用三级分布式控制(点线面),为方案生成+专家系统式的自适应控制系统;Intelliffic系统[18]提供实时方案选择的控制策略形式.随着车路协同等技术的发展,基于传统交通控制理论设计和研发的被动交通控制系统已难以适应交通管控需求,采用控制变量更为丰富的主动交通控制系统被广泛关注.基于此,本文研究和开发主动交通控制系统,以平行仿真、云计算、边缘计算等技术为基础设计系统各部分功能,并研究了采用时空资源分配的主动交通控制模型.
1 主动控制系统
1.1 主动控制系统架构
城市道路主动交通控制系统(Urban Traffic Active Control,UTAC)对控制、仿真和计算具有较高要求,为此在设计系统时构建了4个子系统,包括实时控制子系统、实时仿真子系统、可视化软硬件在环子系统和云-边-端支撑子系统,如图1所示.
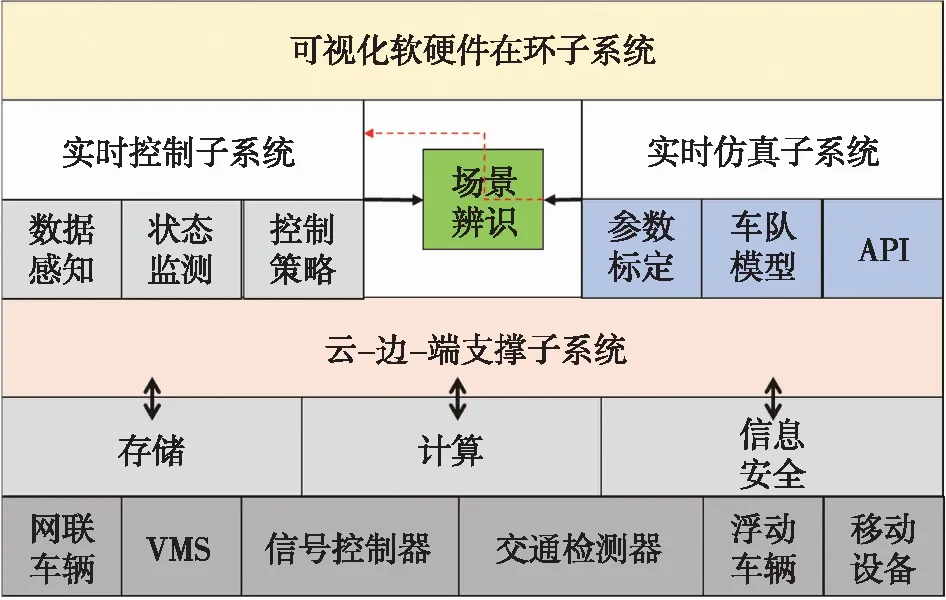
图1 UTAC主动控制系统总体架构Fig.1 Overall architecture of urban traffic active control system
1)在设计控制与仿真子系统时借鉴了平行系统理论的理念和国内部分城市交通管理者的需求,实时仿真子系统提供了对新型控制策略和交通管理理念的快速实现、验证和优化,实时控制系统提供了对于被验证控制策略的现场执行,并通过可视化软硬件在环系统有效地连接了实时控制子系统与实时仿真子系统.
2)可视化软硬件在环系统作为桥梁和展示的途径为管理者和研究人员提供了解城市道路交通的宏观视角.其中实时控制子系统和实时仿真子系统是UTAC的基础,可视化软硬件在环系统可以模拟控制策略和交通状态,所采用的数据可以是现场的实时数据,使它成为现实交通的一种映射;同时也可以采用实时仿真子系统的数据,使可视化软硬件在环系统成为仿真交通的一种呈现.城市交通的管理者,可以在宏观的视角发现和甄别交通控制效果,也可以构建不同的交通场景测试新型的控制策略.
3)云-边-端支撑子系统,利用虚拟化技术提供具有弹性的存储、计算和信息安全能力,尤其系统还设计了GPU资源,可以为人工智能技术的应用提供算力支持.边缘计算是作为支撑未来城市道路交通关键节点被设计的,主要是提供信息安全和现场计算的能力.需要说明的是未来城市交叉口将是自动驾驶、车联网、公共交通、移动出行等各类交通场景数据汇聚的关键节点,因此提供边缘侧的信息安全与计算能力是非常重要的.
1.2 实时控制子系统
不同于欧美等发达国家,中国交通出行需求具有地域特点,机动车为主和非机动车与机动车混合的交通出行方式同时存在.为此UTAC中的实时控制子系统也充分考虑到这一特点,提供多种被控对象和控制目标的选择,并且根据这一特点可能出现的交通需求情况,设计了两类控制算法库:一类为传统交通控制算法,如干线绿波控制、单点自适应控制、防溢流控制、多时段定时控制和特殊灯色控制等控制算法;另一类是主动控制算法.控制策略是支持多种检测数据类型的,包括地磁检测器、广域雷达检测器、视频检测器和浮动车检测器,考虑到评估的重要性还设计了失衡指数、饱和指数等评价指标集合以提供更直观和合理的控制策略评价反馈.并且系统提供VPN在线升级与备份和信号控制配时方案数据的校验保护机制,其中在线升级的设计灵感来源于智能手机的在线升级设计和中国部分城市交通管理部分在以往的系统升级中出现的各类问题和经验,信号控制配时方案数据的校验保护机制的设计能有效阻止因为工作人员疏忽和不专业出现配时方案异常导致的交通安全问题,如图2所示.
1.3 实时仿真子系统
实时仿真子系统[19]以快速分析和验证新型的信号控制策略为目标,因此不同于微观仿真软件VISSIM、PARAMICS和宏观规划仿真软件TransModeler[20],它以中观视角的交通流为仿真主体,主要仿真交通流在控制策略影响下的结果,以此来促进控制策略的迭代优化.为了实现在仿真时交通流的可视化、交通流的动力学参数标定和路网基础参数标定等任务,仿真驱动引擎的设计参考了SUMO仿真软件[21].
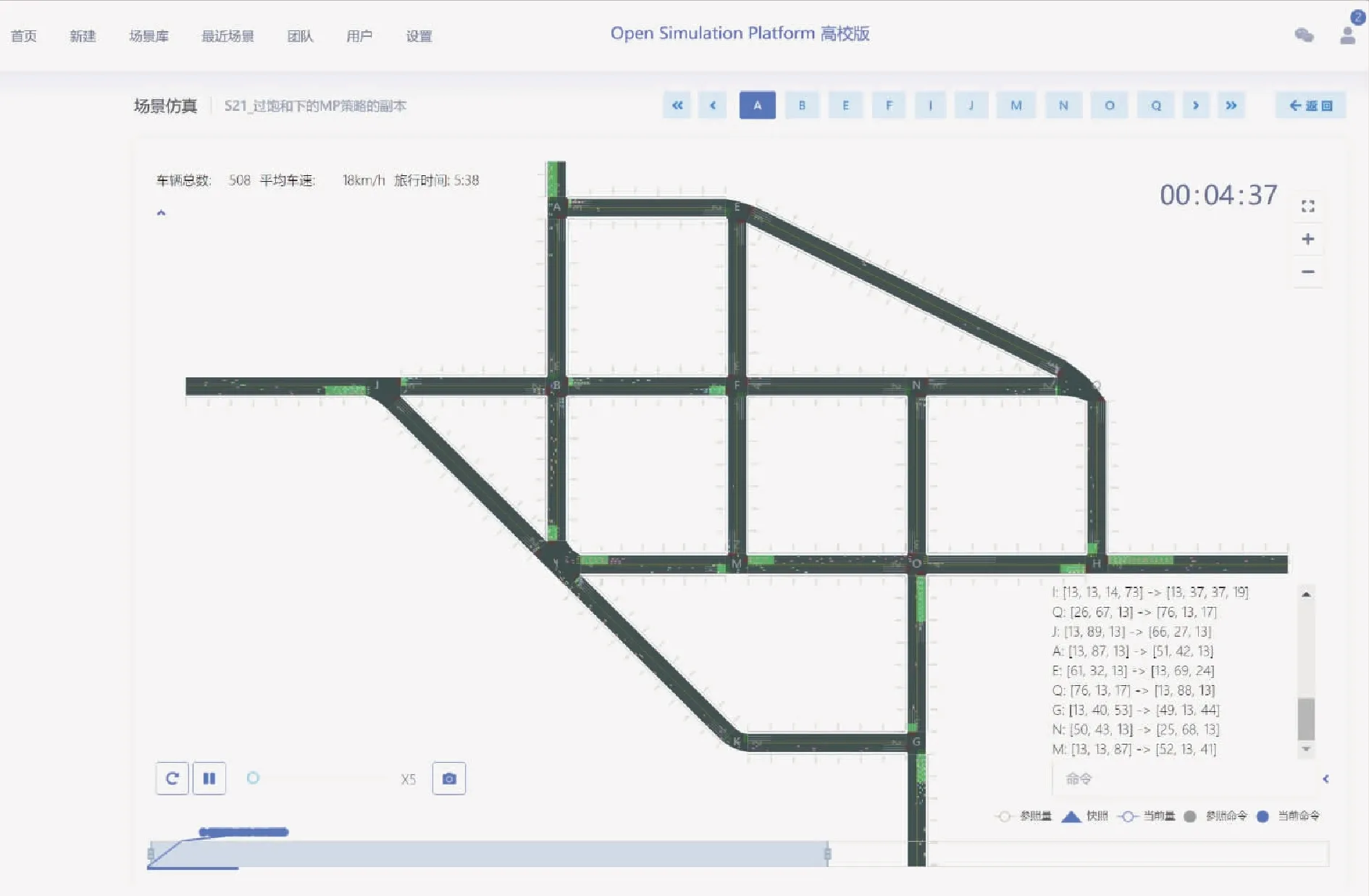
图3 实时交通仿真系统Fig.3 Real-time traffic simulation system
仿真参数自动标定:在设计该实时仿真子系统时主动忽略了单个车辆的动力学特性和基于人工的仿真参数标定,并且该系统采用检测器数据和GIS数据自动标定包括静态数据(道路属性:道路长度、车道宽度、交叉口形状等)和动态数据(车型比例、车速分布、转向比例、车头时距等),同时交通流特性和跟驰特性基于历史检测数据累积,实时检测数据修正得到.
先进控制策略的实现:实时仿真子系统提供了针对新的控制策略开发的良好支持.将检测数据封装为标准的输入输出变量,将信号控制、车辆、可变标志等定为控制变量保存在数据库中.针对不同的场景设计控制策略,利用平行仿真架构实现实时仿真子系统与实时控制子系统的交互,当新的控制策略被证明为可靠时,可以直接推送到实时控制子系统中,并在恰当的时机开始在现实的环境中执行.
2 基于时空资源分配的主动控制模型
从道路交通时间线上“车占用物理空间”这一实体资源问题出发,城市道路交通控制归根结底是一个对道路时空资源分配的控制问题.以广义交通控制理念为核心,建立主动控制模型,将传统以周期、绿信比调节为核心的交叉口信号被动控制转变为车道可变、相位相序可调且具有链状连接特性的交叉口主动控制.城市交叉口交通控制中涉及的时空变量包括车道、相位、相序、相位绿灯时间共4类,在主动控制模型构建时充分考虑4类变量.
如图4交叉口由内部冲突区域和上下游连接路段组成.设交叉口的连接路段集合中的路段j,a的状态方程为
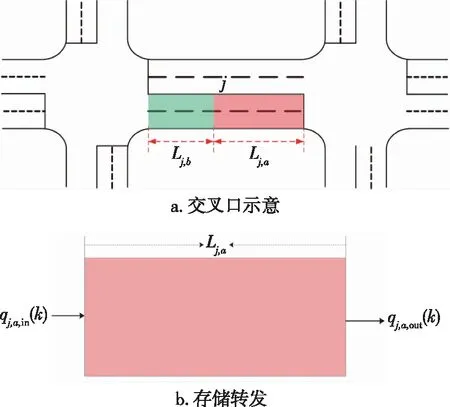
图4 交叉口交通控制模型Fig.4 Model of traffic control at intersections
nj,a(k+1)=nj,a(k)+qj,a,in(k)-qj,a,out(k),
(1)
式(1)表示采样周期k+1内路段j,a的车辆数,等于采样周期k内路段j,a上的车辆数与上游路段流向j,a的车辆数和流出j,a的车辆数的差的和.其中:nj,a(k)表示路段j,a在采样周期k的车辆数;qj,a,in(k)表示采样周期k内上游路段发送给路段j,a的车辆数;qj,a,out(k)表示采样周期k内路段j,a发送给下游路段的车辆数.
为了能够准确表征车道属性的动态特性,提出车道基因概念,即通过将车道的转向属性描述为控制变量予以输出.如图5所示,车道的转向属性包括左转、直行和右转,分别用L,T和R表示,即车道的基因的基本组成单元为L,T和R.
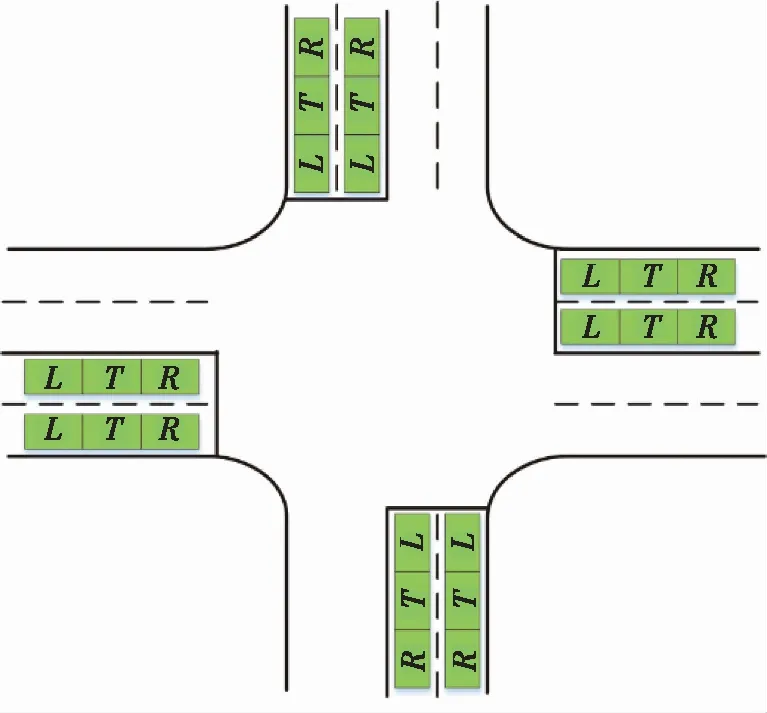
图5 交叉口车道基因组Fig.5 Lane genomes at intersections

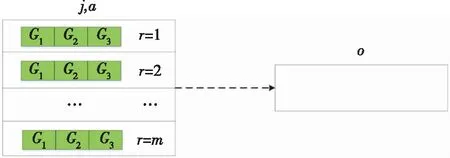
图6 路段j,a的车道基因及下游路段连接Fig.6 Lane genes and downstream link of section j,a
通过上述描述,可以建立车道基因的调控变量:

(2)
s.t.

(3)


nj,a(k+1)=nj,a(k)+qj,a,in(k)-

(4)
3 仿真分析
为了验证UTAC主动控制系统的主动控制模型的有效性,利用系统的实时仿真子系统进行仿真对比验证.采用山东省潍坊市胜利东街与四平路交叉口实际流量数据进行仿真验证.该交叉口为该地区较为核心路口,东西向为双向8车道、南北向为双向6车道,如图7a所示,交叉口采用的原始配时如图7b所示,其中周期为160 s.流量数据由安装在车道上的地磁检测器获取,交叉口的固定配时由潍坊市交通支队提供.

图7 山东省潍坊市胜利东街与四平路交叉口Fig.7 Intersection of Shengli East Street and Siping Road of Weifang,Shandong province,intersection channelization (a)and original timing to pass the intersection (b)
单次仿真时间为36 000 s,进行10次仿真并取平均值.评价参数选择交叉口总行程时间和总排队长度,数据采样间隔为600 s.
如图8所示,对交叉口通过车辆的总行程时间和平均排队长度进行对比.采用主动控制时交叉口通过车辆的总行程时间低于定时控制时交叉口通过车辆的总行程时间;采用主动控制时交叉口的平均排队长度低于定时控制时交叉口的平均排队长度,可知主动控制较定时控制具有更好的控制效果.但在图8b中仿真时间为8 000 s时定时控制下交叉口平均排队长度低于主动控制,原因是由于交叉口输入流量变化较大导致采用主动控制调整时交通流需要一定的适应时间.
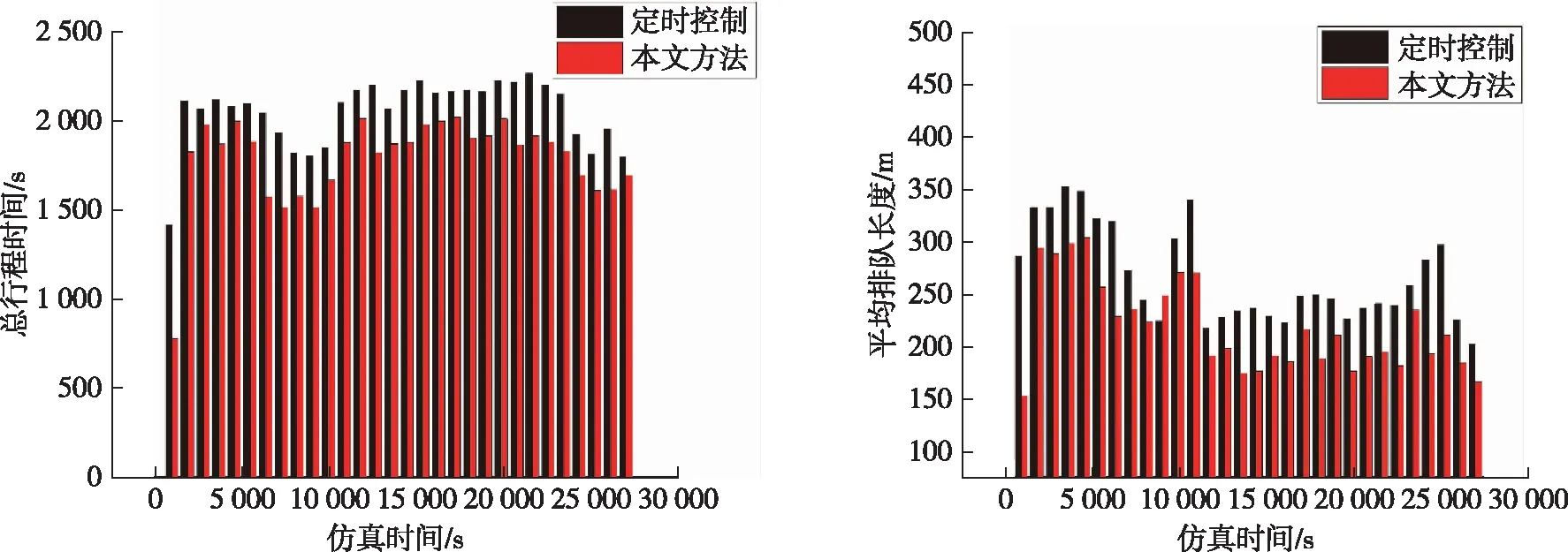
图8 定时控制与本文控制效果对比Fig.8 Comparisons between timing control and the proposed active control,(a) total delay time and (b) average queue value
4 结论
区别于传统交通信号控制系统,UTAC采用主动控制、平行仿真等技术实现控制与仿真的深度交互和控制策略的修正与部署应用.针对传统的被动交通控制策略控制变量不够丰富的问题,UTAC采用了时空资源分配主动控制模型,该算法能够扩展控制变量的维度.但在本文中只采用了单交叉口进行仿真对比验证,虽然与传统固定控制方式相比具有明显优势,但仍需将该系统及仿真应用到更大规模的路网控制中进行有效性检验.
致谢:本文向提供仿真验证实际数据的山东省潍坊市交通警察支队表示感谢.
