南极内陆科研观测舱体内部保障与控制系统的应用与研究
2022-06-11李聪克李丙瑞王焘陈燕窦银科姚旭王煜尘
李聪克 李丙瑞 王焘 陈燕 窦银科 姚旭 王煜尘
(1 太原理工大学电气与动力工程学院,山西 太原 030024;2 中国极地研究中心,上海 200136)
0 引言
南极大陆位于地球的最南端,大陆95%以上的面积被巨厚的冰川所覆盖。这里是地球上最好的天然实验室,南极冰盖隐藏着气候与环境变化信息,是研究全球气候与环境变化的重要区域;南极大陆上空的磁场近乎垂直进出,磁场强度最大,是电离层地磁和高空大气物理的最佳观测场所。然而在南极内陆地区,气候环境恶劣地理位置偏远运输极其不便基础设施匮乏常年低温并伴有极昼极夜现象,这些都给科考研究带来了很大困难。因此通过在南极大陆建设无人值守的科研观测舱以获取冰川学气象学电离层高空大气物理等观测数据是较为准确可靠的技术手段[1]。目前很多无人值守科考设备仍使用单一蓄电池供电,而极地的低温环境使得电池的放电速率加快放电效率降低,严重影响了南极地区科研观测设备的使用寿命,致使很多科考观测数据匮乏[2]。而要想在南极大陆进一步开展包括冰川学气象学天文学等学科的观测研究,长时序的高质量数据就显得尤为重要,这需要更多更好的测量方法和控制技术。
2008年初,中国南极天文中心和澳大利亚新南威尔士大学合作,成功完成了Dome A 天文观测支撑平台PLATO 的部署。PLATO 是一个远程手动的控制系统,由于Dome A 站点在冬季无人值守,所以PLATO 的发电和控制系统的设计需要满足为平台提供连续的功率和热量,并为仪器提供高可靠性的命令和通讯平台[3]。然而PLATO 平台的核心技术不属于我国,为了使我国南极科考不再受制于人,研制拥有自主知识产权的南极科考支撑平台变得十分重要。为突破南极科考支撑平台的限制,2009年4月,我国开始研制首个南极科考支撑平台。该平台主要由现场主控系统数据存储系统科学观测系统通信系统电源系统温控系统以及国内监控系统组成。该平台的温度控制系统采用3 层结构的保温箱结构,箱内采用两路175 W 加热器以升高箱内温度,通过在不同位置安装循环风扇和涡流风扇,促使箱内气体流动,实现保温箱内的均温[4]。
本研究借鉴了PLATO 和我国南极科考支撑平台中优秀的现场方案,在此基础之上基于人工智能神经网络深度学习算法的前沿理论,对南极高空自动化监测系统地表观测舱的低能耗持续观测的控制策略进行研究,并引入可再生能源为自动化监测系统供电。本文设计了一个可保障南极内陆科研观测舱体内部环境稳定的系统,并提出了一套满足控制系统低功耗持续运行的控制策略以尽可能地将能源消耗降到最低水平,为南极高纬度地区提供了一种以柴油发电为主要能源,以风能太阳能等可再生能源进行辅助供电的无人值守野外观测舱[5-6],从而保障南极地区高空观测的实施和开展。该观测计划是基于我国南极高空物理研究计划的需求而特别设计,且已应用于伊丽莎白公主地区泰山站营地(73°51′S,76°58′E)的高空物理观测。
1 系统组成
南极内陆科研观测舱体自动化监测系统主要由地表新能源发电部分地表观测舱和地下能源舱三部分组成。地表新能源发电部分主要由太阳能电池板风力发电机以及相应的光伏发电控制器风力发电机控制器组成;地表观测舱主要由观测系统数据存储系统远程交互系统以及环境控制与保障系统组成;地下能源舱主要由包含柴油发电机和高能锂电池组在内的能源供应系统组成。系统结构图如图1所示。

图1 系统结构图Fig.1.System structure
由图1 可以看出该自动化监测系统的能源系统主要包含4 部分,分别为太阳能光伏发电板风力发电机柴油发电机以及高能锂电池组。高能锂电池组为整个系统的正常运行提供所需要的电能,存储在高能锂电池组中的电能经过电源管理控制器完成DC-DC 转换后,通过输电线向地表观测舱中的用电设备提供电能。高能锂电池组中的电能通过柴油发电机和新能源(太阳能与风能)发电两部分供应获取,其中柴油发电机是主要的能源供应。柴油发电机产生的电能经过逆变器将交流电逆变成直流电后,通过电源管理控制器的DC-DC 转换将电能存储在高能锂电池组中。太阳能的能源供给,通过太阳能电池板采集电能,经过DC-DC 转换后,给高能锂电池组进行充电;通过风力发电机获取的电能依次经过AC-DCDC-DC 转换后,给高能锂电池组进行充电。在越冬期间,小功率的柴油发电机作为主要的能源供应方式,配合新能源发电部分辅助供电就可以满足全功率5 kW 的全系统设备用电。但夏季有人员活动时该自动化监测系统的运行功率达到80 kW,这时就需要切换成大功率的柴油发电机供电并配合新能源发电部分辅助供电以满足整套系统的用电需求。
2 地表观测舱模型的搭建及控制算法研究
2.1 地表观测舱舱体的布置情况
南极内陆科研观测舱体自动化监测系统部署在伊丽莎白公主地区泰山站附近(73°51′S,76°58′E),用于南极内陆地区的高空物理观测,地表观测舱的舱体布置情况如图2所示。

图2 地表观测舱布置情况图Fig.2.Layout of the surface observation cabin
由图2 可以看出地表观测舱的舱体内部以及观测设备全天空成像仪的具体情况。在搭建地表观测舱模型前,我们需要对地表观测舱舱体布放地区的地表气象数据进行分析研究。为此我们选择对太原理工大学和中国极地研究中心2015年在伊丽莎白公主地区泰山营地装设的自动气象站的数据进行研究分析。通过分析该地区全年的气象数据,了解其气候特点,结合气象数据分析南极伊丽莎白公主地区泰山营地设备工作的影响因素,为地表观测设备的模型的搭建以及控制算法的研究提供参考和分析基础。
2.2 南极伊丽莎白公主地区泰山营地的地表气象分析
2015年太原理工大学和中国极地研究中心在伊丽莎白公主地区泰山营地(76°56′54.17″E,73°52′21″S)装设了一个自动气象站。该气象站包含有温度链传感器风速和风向探测传感器超声测距传感器光辐照度传感器以及GPS 模块。其中温度链传感器由41 个传感单元按间距0.5 m进行温度点的采集,传感单元EA00 所能检测到的温度精度为0.5℃,在此温度精度下足以对地下能源舱体的布置提供可用的温度梯度数据[7]。该自动气象站的现场安装情况如图3所示。
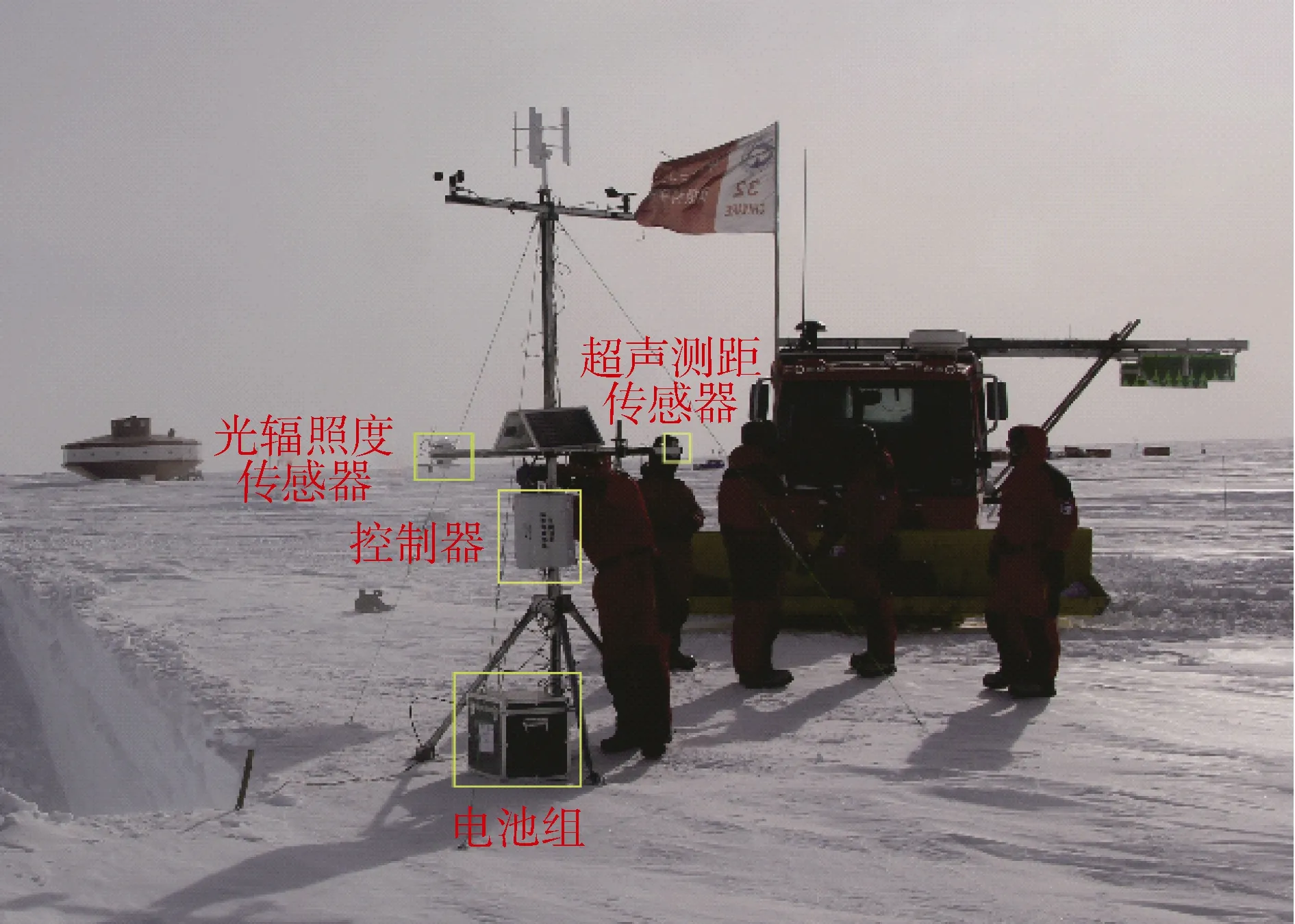
图3 自动气象站的现场安装Fig.3.Site installation of automatic weather station
通过分析2016年该气象站所采集数据,绘制了供电电源电压电池箱表面温度以及太阳辐射这三项参数在当年的变化情况(图4)。

图4 电源电压电池箱表面温度及太阳辐射的2016年变化图Fig.4.The variation of power supply voltage,surface temperature of the battery cell and solar radiation in 2016
由图4 可以看出,电源电压最高时达到16 V左右,在极夜期间电源电压持续下降,最低时为6.3 V。在经过两次风力发电的电力补充后电源电压回升。进入极昼后,电压回升至14.4V 左右。电池箱表面年平均温度在-35℃左右,年最高温度在-11℃左右,而年最低则达到了-56℃。通过分析这三项参数的当年变化可以看出在极昼期间,电源电压电池箱表面温度以及光辐照度变化幅度以及频率均比极夜时大,可能与太阳辐射强度的日变化有关,每一类数据由上升变为下降的转折点代表着一天中辐照最强的时刻,而极夜期间光辐照度为零。
通过综合分析伊丽莎白公主地区的气象数据,我们认为影响当地设备正常工作的主要因素是极夜期间的低温环境使得卷绕式铅酸蓄电池的电压持续降低,过低的电压使得铱星模块无法正常工作,导致采集的数据无法实时传输到国内。因此我们针对这一关键问题,对影响设备正常工作的最大因素气温及能源消耗做具体的分析及方法研究。
2.3 地表观测舱集总参数模型的构建及神经网络预测模型的训练
实现地表观测舱内部环境的温度控制是保证观测系统正常工作的首要条件,地表观测舱内部环境温度会影响全天空成像仪的球罩。在舱内温度高于5℃时,会导致水汽上升凝结在观测罩内部,影响全天空成像仪的正常工作。此外地表观测舱环境温度与外界环境温差越大,带给系统的热量损失就越大,增加了系统的能耗需求。若设置室内带有阈值的自加热器,例如设置温度阈值在0℃到-15℃,则温度会维持在0℃至-15℃,如果极夜时外界出现温度陡降或者突然的大风情况,会导致舱内热量流失过快,加之空气换流传热慢,最终会使带电运行的设备因温度过低而关机无法重启。实时的经典控制算法(例如PID)在该环境下调参过程较为繁琐,一方面空气中的传热除了辐射热难计算,另一方面对流传热的时间难以确定,所以我们建立了一个温度的预测模型,并通过此模型的算法,预测该区域未来一天的温度变化,从而保障地表观测舱内部的温度稳定。再通过建立地表观测舱集总参数模型研究现场加热策略,结合模型各参数关系以及现场实验数据,确定温差与加热功率的关系。
2.3.1 集总参数模型和数学关系的建立
我们首先建立符合地表观测舱的集总参数模型,现场照片与加热模型如图5所示。

图5 现场照片与加热模型。a)地表观测舱布置现场;b)舱内热节点分布Fig.5.Field photos and heating model.a) photo of observation cabin installation;b) thermal nodes distribution in the observation cabin
观测舱的温度是受多方因素影响的,在不考虑雪面反射与太阳辐射(保证系统温度的下限)的前提下,由于舱室封闭,可以认为内部的均流风机可以保证室内空气温度的均匀分布[8-10]。

图6 地表观测舱传热集总参数方程Fig.6.Lumped parameter equation for heat transfer in surface observation cabin
内部空气的节点温度控制方程为:

式中,Tin为内部空气节点温度,为内墙节点温度,min为内部空气总质量,cin为内部空气比热容,为内墙热阻,Qin表示由地表观测舱输入的总热量。
类似地,可以得到内墙节点u1控制方程:

夹层节点u2的控制方程:

夹层节点u3的控制方程:

外墙节点u4的控制方程:

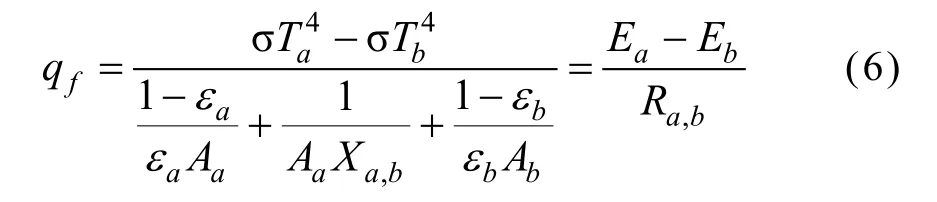
式中,qf的含义是温度为Ta的物体与温度为Tb的物体两表面间的辐射换热通量,σ 为黑体辐射常数,ε为发射率,A为表面积,Xa,b为表面a 到b 的辐射角系数,Ea,b为黑体在温度T下的发射功率,Ra,b为表面a 和b 之间的辐射传热阻力。
假设切断所有热源,即式(1)中的Qin为0,经历dt时间,室内温度相应变化了dT。我们要研究的是Tin与Tout换热的时间关系以及换热量,从而在这段时间内补充这个热量。
从式(1)~(6)中,可以看出表面积辐射角等参数均不受温度影响,0℃以下材料发射率为常量。我们新引入一个叫过余温度的概念,即两个相邻节点在t时刻的温度差可表示为θ,例如Tin在t0时刻与的过余温度为。由此我们可以得到下面的等式:

由式(7)可得等式:
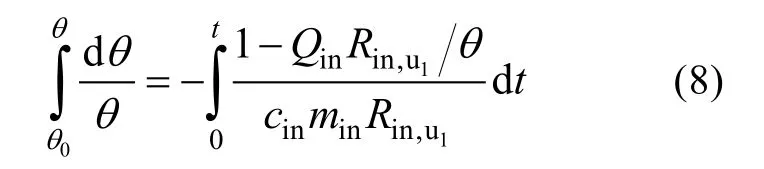
从而得到第一次将要迭代的公式:

由式(9)建立了时间室内空气与内层表面温差以及输入热量的数学关系。由于我们采用神经网络对外界气温进行24 小时的预测,故未来1 小时的平均气温已知,我们假设未来1 小时平均气温保持不变,有如下公式:

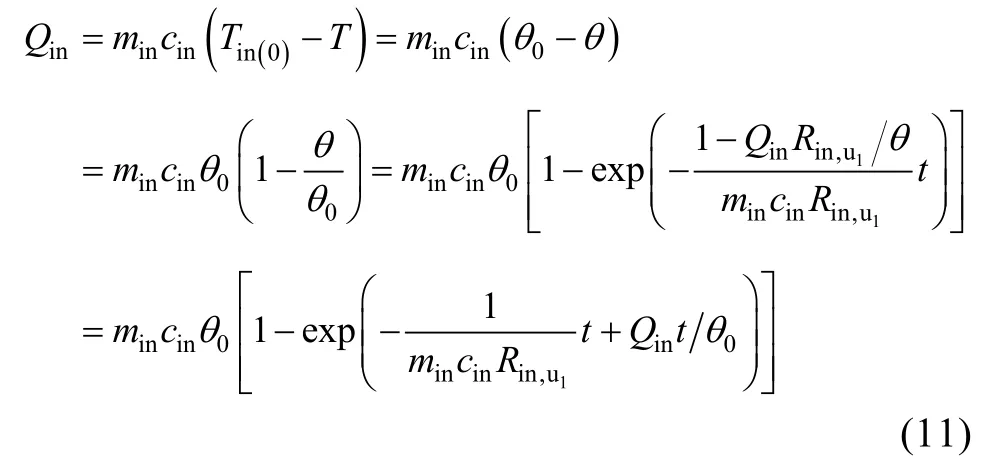
由换热公式(6),可得室内温度Tin,时间t与输入热量Q的关系式如下:
在现场加热实验过程中,选取一组恒温差加热的数据(室内数采频率为15 min/次,室外为1 h/次)。此时加热功率为600 W,达到热平衡,所以。当我们经过两次迭代后,同样也达到热平衡,可以确定等式(12)。此时设过余温度为。
其中,Qin和Qout代表整个系统的输入和输出能量,Rin,out代表内部空气与外界空气间的等效热阻,mc为等效热阻本身的质量和比热乘积。
从而可得:

等式中的mc是经过迭代计算出来的,由于材料的物理特性数值不确定,所以我们采取了确定数学关系,进行现场试验的方式。通过现场试验数据可以发现在加热功率为600 W 的条件下,室内外温差为20℃时达到热平衡。由式(10)可以看出单位时间内的热量交换是由初始时刻内外界温差决定的。因此当加热时间一定且材料传热特征变化忽略不计的情况下,加热功率与初始时刻温差呈线性关系。据此可以确定在不同温度差下的加热功率(表1),此时加热时间均在1 小时之内,舱内空气的温度维持在-5℃左右,表中加热功率的含义为维持该环境温度的加热功率。

表1 不同温差下的加热功率Table 1.Heating power at different temperature differences
2.3.2 神经网络算法的比较与训练模型的建立
为了获取未来24 小时内温度的预测值,对未来1 小时或者几个小时的外界温度进行预测。机器学习模型可以利用参数之间的相关性,在经过训练后,快速自动地识别变化和故障[11]。所以我们选用时间和温度构成单输入的时间序列数据,通过机器学习并预测产生单输出的时间序列数据。
前期我们分别进行了ELM 神经网络BP 神经网络SAE 特征压缩结合的LSTM 神经网络以及Bi LSTM 神经网络的训练和预测。我们参照利用生物信号特征压缩的短时记忆识别负性情绪中的研究方法,在相关算法的对比上参考基于时间序列的SAE 特征压缩的研究方法。采用长短期记忆进行算法研究的方法有很多种,在本研究中我们使用了其中最具代表性的两种Bi LSTM 神经网络和SAE 特征压缩结合的LSTM 神经网络,同时也使用了最基本的BP 神经网络及ELM 神经网络[12-16]。数据样本一共8106 组数据,即时间跨度为8106 小时(2012年12月24日11:05—2013年12月27日7:45),其中训练集的样本占总样本量80%,共6485 个数据;测试集为样本总量的20%,共1621 个数据。我们主要测试的各模型性能参数包含U1(一个综合参数,以均方根误差RMSE为分子,预测值均方根与实数均方根之和为分母)U2(一个综合参数,以RMSE为分子,实际值的均方根为分母)。四种神经网络训练集和测试集实验的结果分别如表2 和表3所示,其中RMSE为均方根误差,MAE为平均绝对误差。

表2 训练集各项性能参数Table 2.Performance parameters of the training set

表3 测试集各项性能参数Table 3.Performance parameters of the test set
四种神经网络训练集与测试集四项性能参数的对比如图7所示。
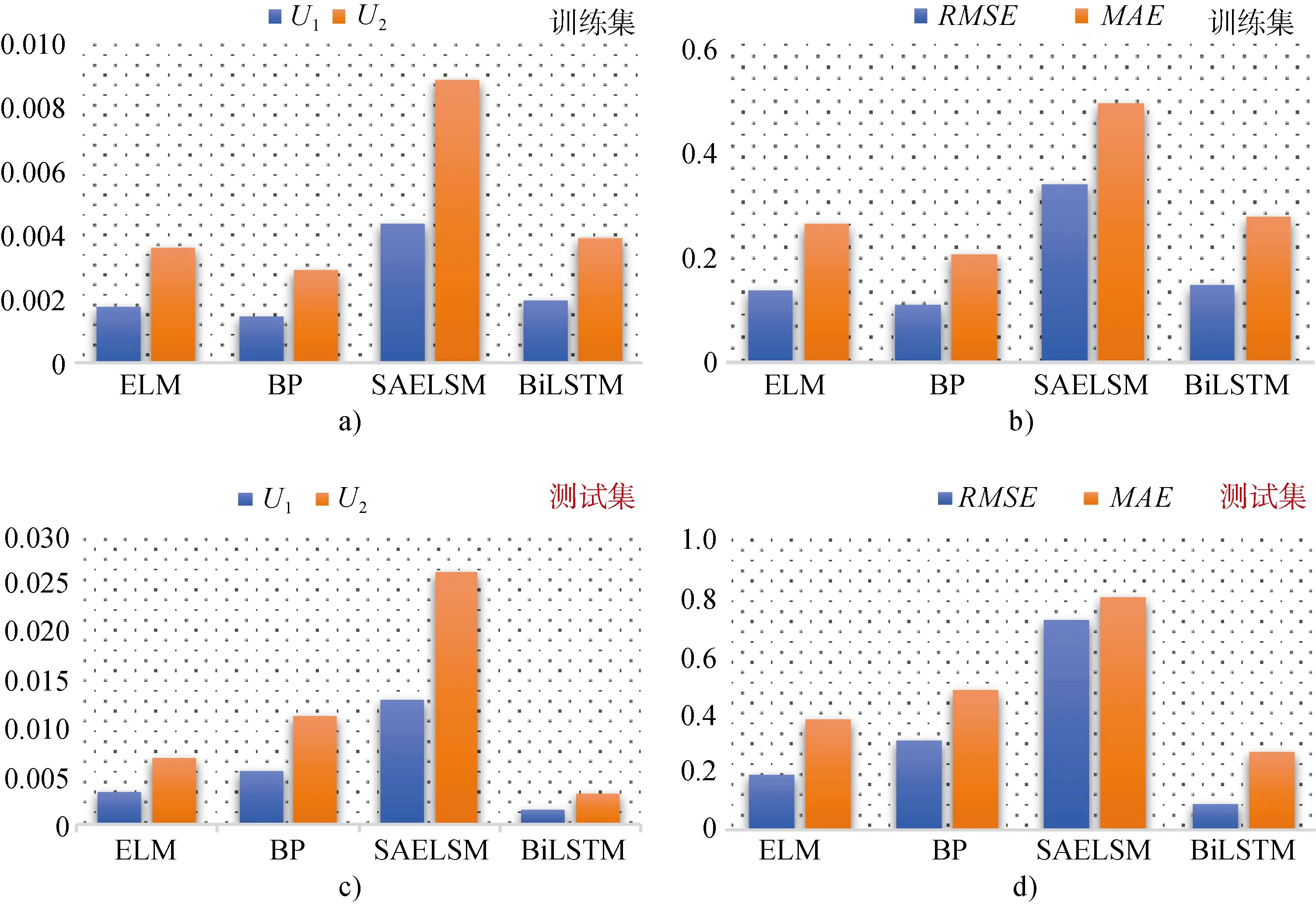
图7 神经网络训练集与测试集四项性能参数的对比。a) 四种神经网络训练集U1 及U2 对比;b) 四种神经网络训练集RMSE 及MAE 对比;c) 四种神经网络测试集U1 及U2 对比;d) 四种神经网络测试集RMSE 及MAE 对比Fig.7.Comparison of four performance parameters of neural network training set and test set.a) comparison of four neural network training sets U1 and U2;b) comparison of RMSE and MAE of four neural network training sets;c) comparison of four neural network test sets U1 and U2;d) comparison of RMSE and MAE of four neural network test sets
在四项性能参数中,我们将测试集中的RMSE和MAE作为模型算法优化的评判标准,将U1和U2作为辅助判断条件,对四个神经网络模型进行评估。其中Bi LSTM 与其他算法相比,RMSE与MAE均最小,分别为0.08638 和0.26352,说明使用该算法的模型,在训练后的测试中所获得的预测值与实际观测值更为接近。通过多次的训练比较,确认前后向反馈的Bi LSTM 算法训练出的预测模型最符合该地区的温度气象因素的预测,故我们选择Bi LSTM 作为预测未来24 小时温度数据的方法。经过多次不同样本不同数据量的实验后,我们发现历史数据越多时间序列数据越完整,所获得的预测值越准确。获得地表观测舱内加热功率操作票的流程大致分为以下三大部分。
(1) 输入样本数据。获取样本数据后,首先进行数据的预处理,设定阈值剔除无效数据。
(2) 预测方法的确定。将数据量按80%20%分开,分别作为训练集和测试集,然后进行BPELMBi LSTM 以及SAELSTM 四种神经网络的训练和测试,横向对比Criteria 的数值,此过程循环3 次,选择3 次结果中最小的一次Criteria 对应的算法。
(3) 加热操作票的产生。在温度预测基础上,根据现在的温度与之后2 小时的温度,使用其中偏低的温度作为预测温度,代表之后1 小时的平均温度。将该预测温度与Bi LSTM 模型相对比,选择温度更低的一个结果作为温差产生的参数。加热操作票产生后,通过卫星可以实现在国内对现场进行远程操作和控制。
获得地表观测舱内加热功率操作票的流程图如图8所示。

图8 加热功率操作票流程图Fig.8.Flow chart of the heating power operation ticket
3 地下能源舱布置条件的分析以及伊丽莎白公主地现场应用情况
3.1 伊丽莎白公主地区泰山营地雪下舱体布置条件分析
测量温度剖面的链式传感器由太原理工大学制作,考虑到南极地区常年高寒冰雪的环境特性,传感器的线缆以及探头均为耐低温防潮防水设计[7]。我们选取伊丽莎白公主地2020年2月至5月的数据绘制地下温度(地表以下温度)随深度和时间的变化图(图9)。

图9 2020年2—5月10 m 深温度廓线信息Fig.9.10-meter deep temperature profile information from February to May in 2020
由图9 可以看出温度随时间的变化主要集中在地下2.5 m 附近,因此我们选择将地下舱室布置在地下2.5~5.5 m 之间。为了可以更具体地了解地下舱体所在空间随时间变化的温度的空间分布,对4 个月的温度数据做了时空的绘制,如图10所示。
图10 中的两个平面(红色框的平面为雪下舱体底部平面,蓝色框的平面为雪下舱体顶部所在平面)之间区域为地下舱体所在空间。由图10 可以看出,2020年5月,地表气温下降到-57℃左右,而地下舱体顶部(即地下2.5 m 以下)温度基本不变,维持在-39℃左右,故在地下5.5~2.5 m 间适宜布置需要稳态环境的设备仪器。由于地下能源舱所处环境不会发生变化,所以不用对其进行实时控制,只需要设置温度上限并进行抽冷风操作即可。这就为需要在稳态环境下运行的设备提供了合适的安装环境[17]。另外在伊丽莎白公主地开展的地学研究表明大型个体累积事件通常与强风发作有关[18-19]。因此为了避免局部的雪积累量,将大体积的舱体放置在雪下是有必要的。
3.2 南极伊丽莎白公主地现场应用情况
评价该系统最重要的因素是舱体的温度和传感器运行情况[20]。在每天的温度监控中,我们发现地表观测舱传感器工作的环境温度维持在-10℃至0℃,且全天空成像仪在极夜的运行状态良好,监控所拍摄到的全天空成像仪球罩仅有少量结霜,不影响极光观测。该系统的现场应用情况如图11所示。由图11 可以看出在无人值守状态下,地表观测舱内部环境温度维持在 0℃至-10℃。在2020年4月进入极夜后,观测舱内部监测图像表明观测舱罩结霜较少,不影响极光观测,文件存储和文件信息状体显示所有传感器均正常工作。
4 结论
本文提出了一种可保障南极内陆地区科研观测舱体内部环境稳定和控制系统低功耗持续运行的控制策略,通过搭建热网络模型,直观地表示外界环境温度内部环境温度材料特性以及加热功率的数学函数关系。通过现场的600 W 加热实验数据计算并推算出了室内外温差与输入加热功率的关系,得出了一套不同温差对应不同加热功率的策略。本文将极端环境下稳态环境的维持方法,转化成热力学传热模型并结合机器学习智能算法确定最优解的数学问题。在对长短期记忆的相关神经网络与普通神经网络对比过程中,选择了最适合现场未来一天环境温度预测的一种算法模型。封舱后的实际应用表明,在地表观测舱内外温差达30℃时,舱内温度仍维持在-10℃至0℃,极光观测罩无结霜现象,这充分验证了我们这套加热策略的可行性。不过该加热策略仍存在些许不足之处,在选择神经网络时只采用影响舱体温度作为最主要因素,外界气温作为单输入来选择输出时的加热功率。如果考虑舱体内部全年温度变化和外界气温作为神经网络多输入,进行算法的改进,可使得预测的环境维持手段更加有效。
