改进MPGA优化基于效-费比的TMD装置★
2022-06-11胡淳耀张洹速卜浩特夏皓伦
胡淳耀,张洹速,卜浩特,夏皓伦
(辽宁工程技术大学土木工程学院,辽宁 阜新 123000)
0 引言
随着科技的发展,减震措施日趋完善,TMD最早由Frahm设计[1],经过时间发展,已有大量研究表明只有合适的TMD参数才能达到最优控制效果[2-5],而结构下方土体参数是决定TMD最优参数(阻尼、质量比和最佳调谐频率)的关键因素之一。如今,更应该注重基于费用-效果的TMD成本控制,然而只有少数文献从费用-效果这方面对减震控制系统进行经济性的研究,尤其是考虑了SSI效应的全周期寿命分析。Greco等提出了一种基于多目标遗传算法(NSGA-Ⅱ)的成本优化方法,旨在控制中低地震条件下线性结构引起的振动,通过考虑经济和性能标准来进行最佳设计[6],前述文献均假设TMD的成本函数组成中的质量、刚度、阻尼为线性关系,而文献[7]表明刚度和阻尼参数与造价成本并非完全成线性关系,因此,在TMD参数与成本的非线性关系前提下进行成本寻优是亟需解决的问题。卜国雄[8]基于投资-效益准则分析TMD装置系统的全寿命周期费用LCC(Life Cycle Cost)的构成及与减振效果之间的关系,提出基于投资-效益准则的TMD减振装置的优化设计方法。但是无法实现准确找出最优效-费比及最优效费比下的TMD各参数数值。
基于上述问题,本文提出了一种基于改进多种群遗传算法,以使安装的成本和效果达到良好的平衡。具体工作流程为第一部分建立系统全寿命周期成本函数,将TMD成本函数根据相关组成部件的确切造价设置为非线性函数[9],第二部分介绍对多种群遗传算法的改进,使其具有实现寻找最优效-费比的功能,而后对程序进行检验。
1 TMD系统的全寿命周期费用分析
生命周期成本LCC(Life Cycle Cost),又称全寿命费用,是指为实现控制装置的方案设计、工程研究、生产、使用维护及拆卸而支付的所有成本的总和[10]。本文参考文献[11]的成本调研。首先,将TMD设备的全寿命周期成本分为两部分:初始成本C;使用和维护成本M,即:
W=C+M
(1)
初始造价C:
TMD安装的初始成本包括技术研究开发成本和制造成本,技术研究开发成本主要包括技术方案论证、可行性研究、设计计算分析测试和人工劳务成本。相对的TMD无源器件的制造和理论相对简单,技术含量相对较低,研发成本相对较小。同样的技术开发成本,在一定的社会科学水平上,为一个固定值,不随着TMD质量比的增加而增加。
C0=定值
(2)
其中,C0为技术研究和研制费用,由社会科技水平确定。
1)TMD质量成本:TMD的附加质量可利用现有结构中的水箱、环形水箱围护结构等,具体造价根据实际材料确定。当TMD质量为Mtmd时,代入式(3)计算其成本,可以看出当α=1时,质量与成本成线性关系。
(3)
其中,ρ为钢筋混凝土的密度;α为增大调整系数,α>1,随着质量块的增大,其制造安装费用相应增大。
2)导轨:作为一种支撑TMD的导轨,其制造成本主要取决于垂直载荷(TMD质量)和导轨长度(TMD位移限制),此外,对于不同的精度等级,成本也不同。南京工艺设备制造有限公司提供的GZB100AAL导轨价格见表1。

表1 型号GZB100AAL导轨报价
根据表1中的数据,取中值,即每米导轨价格为13 000元,60 t货物滑块成本为16 000元(精度等级4),则导轨成本为:
(4)
其中,L为导轨的总长度,m;n为导轨的根数。
3)黏滞阻尼器:黏滞阻尼器的成本主要取决于最大出力(吨位)和行程。根据上海材料研究所提供的数据,每吨的近似成本如表2所示。结果表明,阻尼力与成本呈非线性增长关系。经Matlab三阶拟合得到成本函数曲线为:
C3=0.02c2+0.3c+1
(5)
其中,c为阻尼器最大出力,t;C3为黏滞阻尼器建造成本,元。
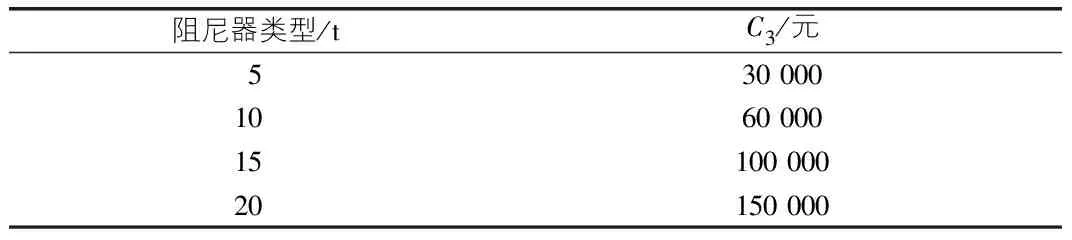
表2 各个吨位阻尼器价格
2 改进多种群遗传算法效-费比寻优
启发式算法已经被广泛应用到建筑领域,例如,最小化钢框架结构的质量[12]将启发式算法用于结构的损伤检测[13]等,其中以TMD的参数设计更为普遍[14-15]。为了获得TMD最优参数,兼顾成本控制与运算速度,本文对多种群遗传算法进行改进,具体改进如下:
改进适应度函数,满足目标优化的同时兼顾效-费比。适应度函数从原来的唯一优化要求(Obj=min(max|X1,X2,X2,…,Xn|),最大结构动力响应的最小值转换为多目标优化,首先根据随机分配的三个变量参数代入动力方程计算动力响应数值,本文以结构最大位移减小百分比作为预设目标,如满足预设目标则代入总成本函数Ct=C0+C1+C2+…+Cn+M计算成本,因后续的选择、交叉、变异是在完整种群个数基础上进行,为保证种群个数不发生丢失,引入罚函数用来替代不满足预设目标的种群,数学算式为:
其中,X1,X2,X3,…,Xn均为每层最大位移;D为不设置TMD构件结构最大位移;p为预设最大位移减小百分比;Ct为总成本;Cp为罚函数成本;参数K为违约影响因子,一旦某个体约束条件不满足,其目标函数将增大,其个体更容易被淘汰,既定控制目标下TMD全寿命周期成本最小化的算法设计的流程图如图1所示,效-费比定义为:ROI=D(1-p)/Ct。通过运算即可得到TMD减振控制系统效-费比。
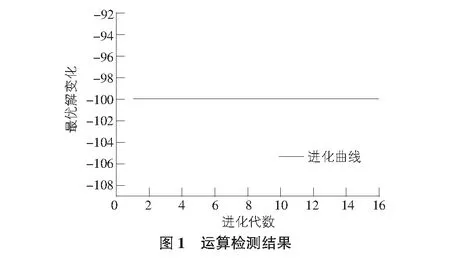
为了验证程序准确性,对程序进行检测,将参数p设置为100%,Cp这里取-100,运算后结果见图2,与预期一致。

3 结语
本文分析了TMD装置的全寿命费用成本的构成及计算方法,给出了影响TMD费用的主要组成部分的成本函数,首次尝试使用启发式算法基于各组成部分成本函数对TMD设置周期费用进行优化,给出了具体的设计流程。通过对传统遗传算法的改进实现了基于最优效-费比的TMD参数寻优,摆脱了以往人工采用的单一控制变量寻优的局限性,节约社会资源。目前基于投资-效益的减振优化设计研究有限,启发式算法在其中具有广阔的应用前景。由于物价是变动的,本文各种控制策略的全寿命成本的计算中存在很多经验和假设,本文目的旨在给出优化方法,对于成本变动或加入其他成本造价,均有一定意义。
