基于摄影测量技术对玛多MW7.4地震地表破裂特征的快速提取及三维结构的室内重建
2022-06-10王文鑫邵延秀姚文倩韩龙飞刘小利高云鹏王子君秦可心屠泓为
王文鑫 邵延秀* 姚文倩 刘 静 韩龙飞 刘小利 高云鹏 王子君 秦可心 屠泓为
1)天津大学,地球系统科学学院,表层地球系统科学研究院,天津 300072
2)中国地震局地质研究所,地震动力学国家重点实验室,北京 100029
3)中国地震局地震研究所,地震大地测量重点实验室,武汉 430071
4)青海省地震局,西宁 810001
0 引言
在活动构造研究中,对大地震地表破裂的精准识别与定量分析,是评估地震震级、量化断裂活动强度与幅度、探讨地震破裂动态过程和发震机理的基础(邓起东等,2004; Arrowsmithetal.,2009; Zielkeetal.,2012; 刘静等,2013)。野外调查是获取地震地表破裂特征的最基本方式。传统的野外地表破裂调查往往利用全站仪、手持GPS、卷尺等测量仪器进行人工实地测量(Yuanetal.,2011; Zhengetal.,2013),这些方法虽然能够在局部范围内获取精度较高的地形地貌数据,但测量范围有限、效率低,很难快速获取整条断裂带大范围的高精度地形数据(刘静等,2013; 毕海芸等,2017; Bietal.,2017)。此外,人工测量的工作量较大、成本高、费时费力,且人工作业过程中判断标准的主观差异也可能造成测量结果与实际地形特征不符(陈桂华等,2006; Ouédraogoetal.,2014)。近年来,摄影测量技术的快速发展,为高精度地形地貌数据的快速获取提供了另一种更有效的技术手段(Matthews,2008; Fraseretal.,2009; Bemisetal.,2014)。
摄影测量技术是一种通过摄影设备(如数码相机、航摄仪、传感器等)拍摄测量对象,利用被摄物体的影像重现物体空间位置和三维形状的技术(Matthews,2008; 龚健雅等,2018)。近年来,该技术的快速发展极大地改变了野外地质工作的方式,提高了野外工作效率,同时也使得在室内重现野外构造形变的三维结构特征成为现实(张剑清等,2009; Javernicketal.,2014)。其中,SfM(Structure from Motion)多视角移动摄影测量技术以其方便快捷、可低成本获取数十千米尺度工作区的高分辨率三维地形数据的优势而受到广受关注(Westobyetal.,2012; Fonstadetal.,2013; Bietal.,2017)。SfM方法可通过运动相机获取的多视角立体图像集自动求解相机的空间位置和姿态,进而重建目标物的三维地形,该方法的出现大大提高了摄影测量的自动化程度(Westobyetal.,2012; Fonstadetal.,2013; 魏占玉等,2015; 程争刚等,2016)。而迅速普及的中小型无人机等低空遥感平台为SfM摄影测量技术提供了平台基础。小型无人机具有成本低、安全性高、数据获取效率高、作业方式灵活快捷等优点(张春森等,2015; 陈晓勇等,2019),目前已经在微构造地貌解译(Johnsonetal.,2014; Turneretal.,2014)、滑坡监测(Lucieeretal.,2014; Giordanetal.,2020)等众多领域中得到了广泛应用。
以往在大地震之后的科学考察中,鲜有基于航空摄影测量技术获取整条地震地表破裂带几何结构等定量参数的工作报道。2021年5月22日玛多MW7.4 地震发生后,本研究团队于第一时间利用中型混合翼无人机和小型多旋翼无人机对震后的地表破裂进行了摄影测量,在影像中可清晰、直观地观察到地表破裂的相对宽度与空间分布。同时,我们还采用移动智能设备搭载的激光雷达扫描仪(Light Detection and Ranging,LiDAR)对地表破裂的三维结构信息进行采集,并在室内真实还原了野外的地形地貌现象及特征。研究结果充分展示出摄影测量技术在活动构造研究中巨大的应用潜力,为活动构造的定量化和精细化研究带来了新的契机。
1 玛多MW7.4 地震背景

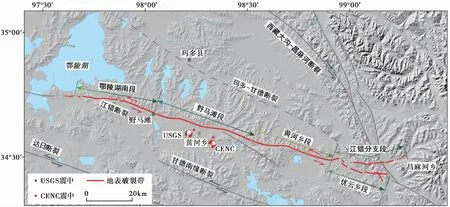
图 1 玛多 MW7.4 地震的构造背景图Fig. 1 Seismogenic tectonic background map of the Madoi MW7.4 earthquake.图中地表破裂带为作者所在团队利用航拍技术获取的较精细的破裂带分布简图
此次玛多MW7.4 地震是自2008年汶川MW7.9 大地震之后中国发生的震级最大、地表破裂最长的地震事件,且此次地震发生于巴颜喀拉地块北部边界——东昆仑断裂带以南70km处附近,是近20年来围绕巴颜喀拉地块边界断裂带附近发生的又一强震。通过野外考察确定地表破裂组合的特征及分布规律,不仅有助于厘定玛多MW7.4 地震的发震机制和地表破裂过程,同时对于深刻理解巴颜喀拉地块乃至整个青藏高原现今的构造变形状态及今后的运动演化过程等也具有重要的科学意义。
我们在玛多地震发生后第一时间赶往现场,利用摄影测量技术迅速获取了高精度、高分辨率的数字高程模型(Digital Elevation Model,DEM)和数字正射影像图(Digital Orthophoto Map,DOM),并沿破裂带开展了地震地表破裂与伴生次生灾害等地表调查,这为震后分析地震灾情、评估地震断层危害性等工作提供了重要依据,也为今后的地震地质科研和教学工作保留珍贵的资料。
2 数据采集与处理
2.1 SfM摄影测量原理
图 2 展示了基于SfM方法获取地形地貌数据的基本原理,其工作流程大致包括以下步骤: 在野外采集数据时,首先需要在研究区域内布设3个及以上地面控制点(图2a),并获取每个地面控制点的空间坐标。然后根据区域海拔、起伏度等地形地貌特征,设置合理的飞行高度、影像重叠度、拍摄角度等参数,规划飞行航线。在得到具有一定重叠度的影像数据集(图2b)后,利用集成SfM算法的影像处理软件对数据进行处理(Turneretal.,2014; Ajayietal.,2017; Jamesetal.,2017)。
本研究应用半自动化商用软件Agisoft PhotoScanTM进行数据处理,主要包括以下几步: 1)对影像进行预处理,剔除成像不佳的影像,将质量较高的影像导入软件; 2)获取影像之间的同名特征,恢复摄影时相机的相对位置和姿态,重构三维场景结构,生成密集点云数据; 3)利用地面控制点的坐标位置进行绝对校正,将点云的三维坐标转换到现实中的空间坐标系中; 4)生成网格和纹理,获得具有空间地理坐标的点云、DEM、DOM等数据(Nexetal.,2014)。
2.2 野外数据采集设备
本次野外地形数据的采集使用了3种设备,即纵横大鹏CW-15垂直起降固定翼无人机、大疆精灵Phantom 4 Pro V2.0无人机以及移动智能设备iPhone 12 Pro激光雷达扫描仪(LiDAR)。下文将对这3种设备做简要介绍。
2.2.1 纵横大鹏CW-15垂直起降固定翼无人机

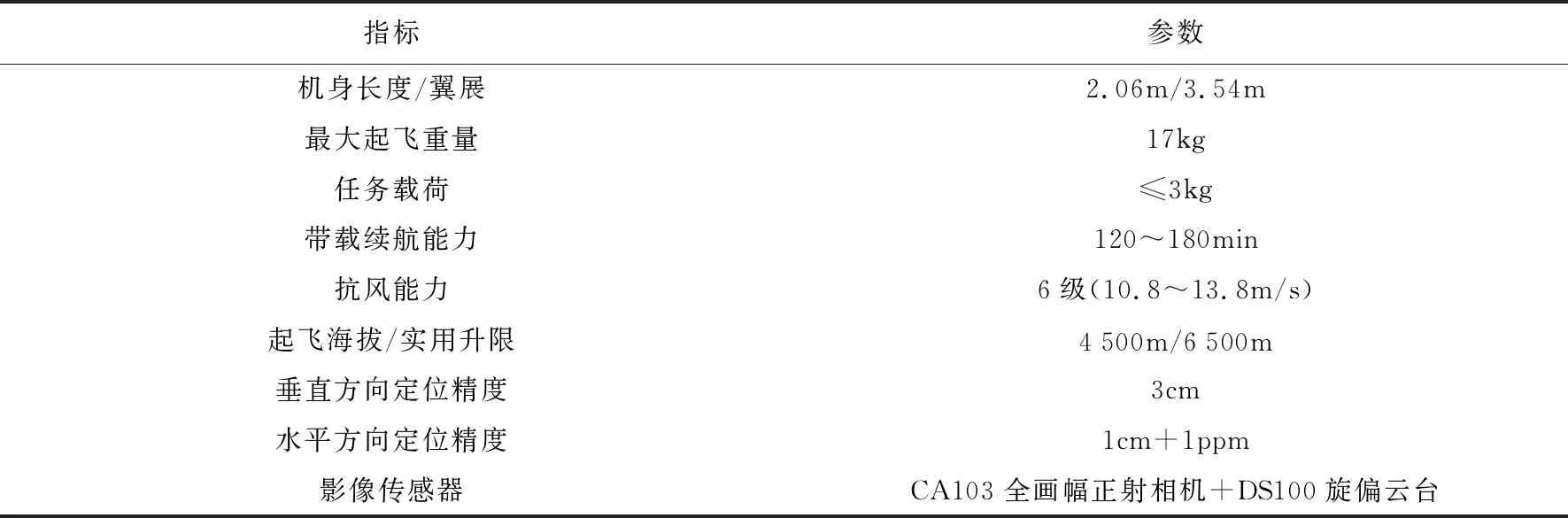
表 1 CW-15垂直起降固定翼无人机系统的主要参数Table1 Main parameters of CW-15 VTOL fixed-wing UAV system
2.2.2 大疆精灵Phantom 4 Pro V2.0无人机
抗战结束以后,中国农村经济在长期战乱与自然灾害多重打击之下,风雨飘摇,农村经济政策仍以发展农业生产为主,因此合作组织仍以农业生产合作社为组织重点,农业生产合作社占比进一步增大,同时围绕农业生产之运销、消费、供给等合作社也有所发展。而信用合作社占比则持续下降,至1949年信用合作社占比已不足30%。
2.2.3 移动智能设备激光雷达扫描仪
激光雷达扫描LiDAR是一种集激光测距、全球定位系统和惯性导航系统3种技术于一身的系统,能够有效去除地表植被或人工地物的影响,直接获取真实的地表三维信息并生成精确的DEM,逐渐成为构造地貌量化研究中的可靠技术(Linetal.,2013; 刘静等,2013,2018)。近年来,LiDAR技术的迅速普及和应用,为大范围高分辨率三维地形数据的获取提供了一种更为方便快捷的技术手段。然而,LiDAR技术存在成本较高、后期数据处理较为复杂等问题,这也使得该技术的进一步推广应用受到限制(Johnsonetal.,2014)。
苹果(Apple)公司于2020年发布的移动智能设备iPhone12 Pro,搭载了LiDAR扫描仪这一技术,该技术通过激光束照射目标,利用回波所需的时间确定其与物体之间的距离。LiDAR扫描仪的有效范围约为5m,通过每秒发送的数十万个光脉冲,可在小范围内以相对准确的方式计算出距离和物体大小,进而构建3D模型(Luetzenburgetal.,2021)。LiDAR激光雷达不仅对焦精度更高,而且还能够通过其强大的3D视觉能力以更高的精度将物体从环境中剥离出来,之后通过算法进行机内多张合成,从而形成更符合真实光学特性的照片,足以媲美单反相机的拍摄效果,而得到的数据可用于对物体或环境进行精确的3D描绘,提供更多有关其周围环境的有用且准确的信息,改善拍摄精度,增强现实体验。虽然目前这一技术的扫描精度和最后成像结果还不是那么完美,但这已经是在不借用外部设备的前提下,可在野外地质考察工作中实现的最快捷、最方便的3D模型采集方式。
3 结果与讨论
3.1 基于高精度正射影像的地表破裂特征提取
2021年5月24日—6月15日,我们使用纵横大鹏CW-15无人机对玛多MW7.4 地震的同震地表破裂带进行航拍,所用机型携带GPS模块,可通过与单反相机的相对位置准确得到航拍照片的GPS信息。我们首先以震后数天由InSAR range offset推测的地表破裂位置(社交软件共享)作为航拍作业中心线,设计了覆盖中心线两侧各500m、长约180km的摄影测量廊带,并在震中区段适当加宽了航拍范围的宽度。然后将所设计的摄影测量廊带以kmz文件分段导入CW Commder飞控平台设置航拍区域并自动生成航空测线,其中航空照片的航向、旁向重叠率均为80%,地面比例尺大多设置为1︰300(在地形复杂的破裂东端设置为1︰600)。为提高航拍照片绝对位置的准确度,通过架设RTK地面基站并采集CORS站数据的方式对无人机Pos姿态数据进行校准。每获取一个架次的航空摄影测量数据,立即使用PPS位置解算软件对无人机姿态数据(Pos)、RTK基站位置数据和CORS站数据进行解算,从而获取每张航空照片的精确位置信息,包括经纬度坐标、高程、无人机的航向、滚转与俯仰等参数。最终完成了面积约为256km2的区域地形地貌信息采集,共采集航片34302张。

图 4 大疆精灵Phantom 4 Pro V2.0无人机的外观及野外作业图Fig. 4 Appearance and field operation diagram of DJI Phantom 4 Pro V2.0 UAV.
利用PhotoScan软件对无人机摄影测量获取的影像数据进行快速拼图处理,生成DOM正射影像。无人机摄影图像的质量取决于航拍区域地形、作业时风向、离地高度、相邻照片的重叠度、特定区域照片数量等外界条件。尤其是在高原地区,地势起伏大,地形复杂,天气多变,不同飞行区域的无人机飞行高度不同,以上诸多因素导致影像分辨率有所差异。此外,为获得最高精度的DOM数据,我们在点云生成过程中选择了最稠密处理。最终获得的破裂全段的DOM影像分辨率为2~7cm/pix,其中大多数影像的分辨率为3~5cm/pix。
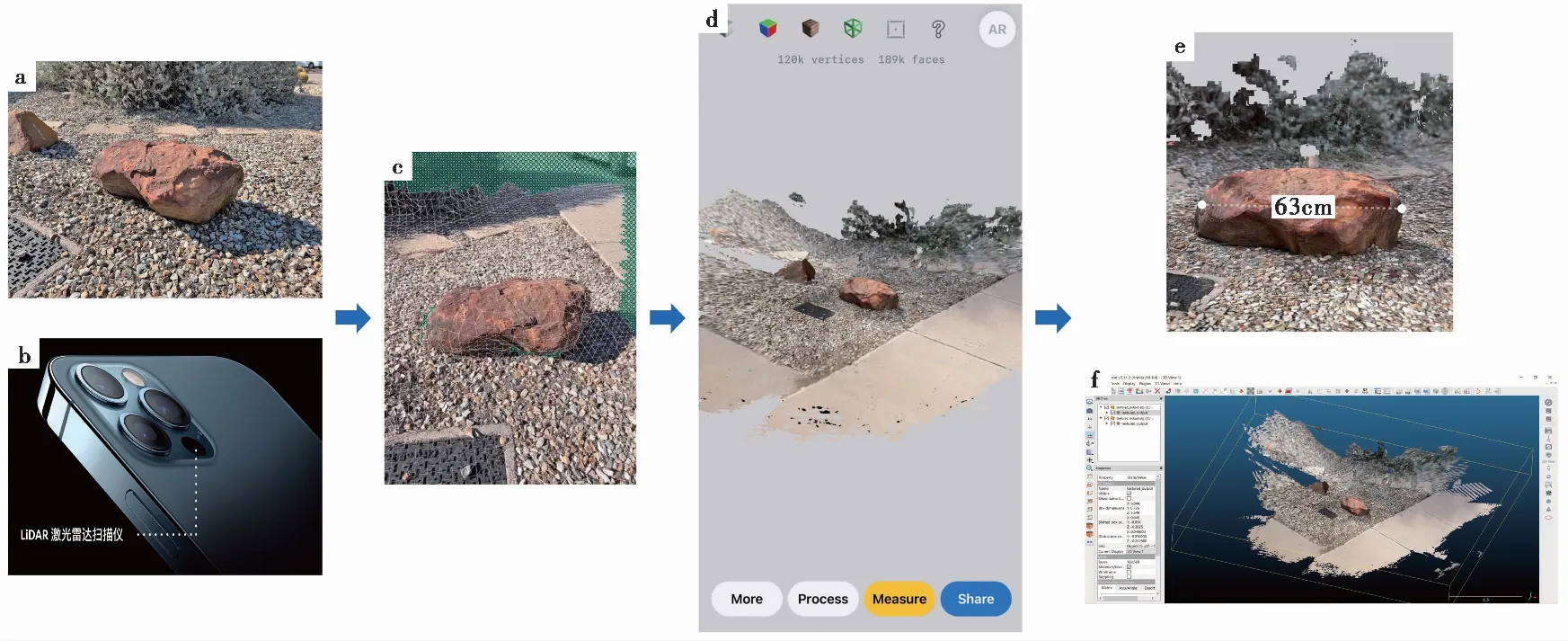
图 5 iPhone 12 Pro激光雷达扫描仪的AR成像示意图(图片资料来自网页(3)https: ∥opentopography.org/blog/iphone-lidar-applications-geosciences。)Fig. 5 Schematic diagram of AR imaging for iPhone 12 Pro LiDAR scanner(Image data from webpage①).a 扫描对象的照片; b iPhone 12 Pro激光雷达扫描仪; c 扫描过程中的纹理格网覆盖; d 完成对扫描对象及其周围环境的扫描; e 扫描对象的长度测量; f 扫描对象的三维建模
之后使用GIS软件对地表破裂进行矢量化处理,图 6 展示了本次无人机航拍影像所覆盖区域的DOM正射影像。厘米级的高分辨率正射影像可以清晰地显示出同震地表破裂带的空间展布与相对宽度,在此基础上能够准确地解译地表破裂并提取同震位错等相关参数。
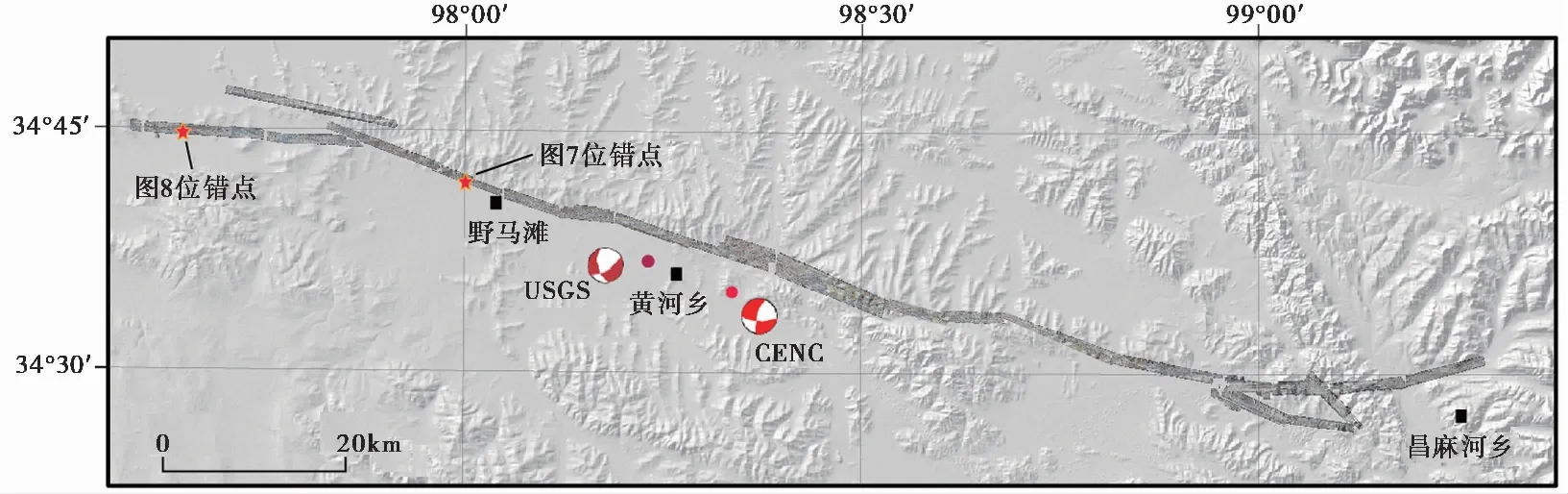
图 6 CW-15无人机航拍的正射影像覆盖的区域Fig. 6 Coverage area of CW-15 UAV aerial orthophoto image.
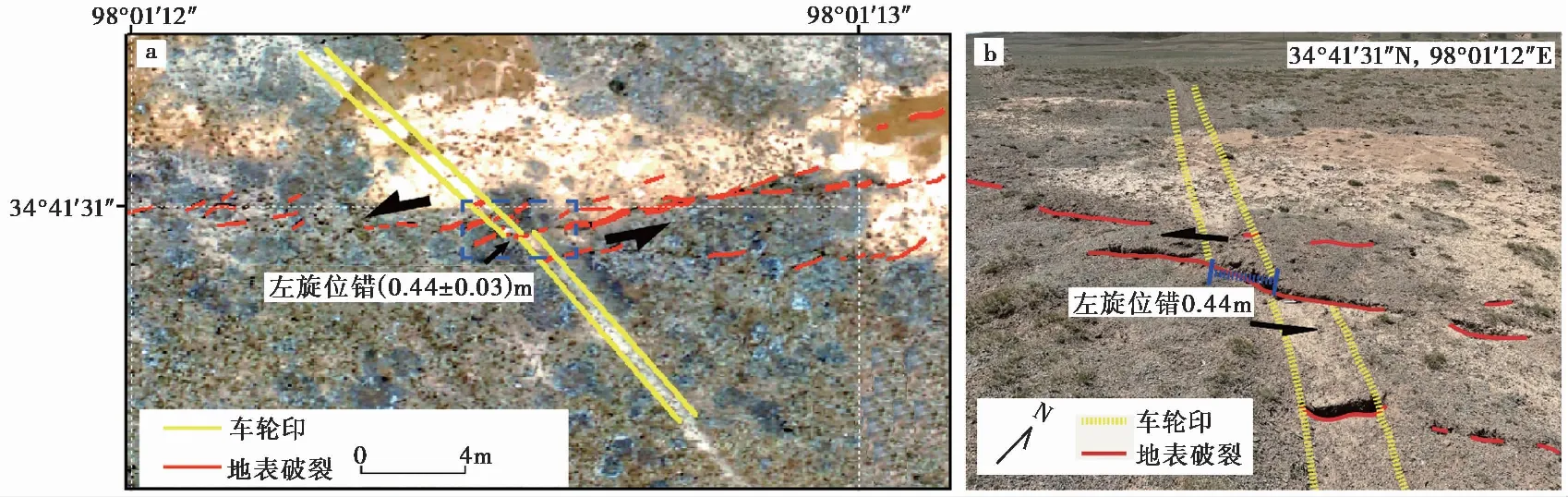
图 7 摩托车车辙印左旋位错的影像解译(a)及现场实地测量结果(b)Fig. 7 Image interpretation(a)and field measurement(b)of left-lateral offset in motorcycle wheel mark.
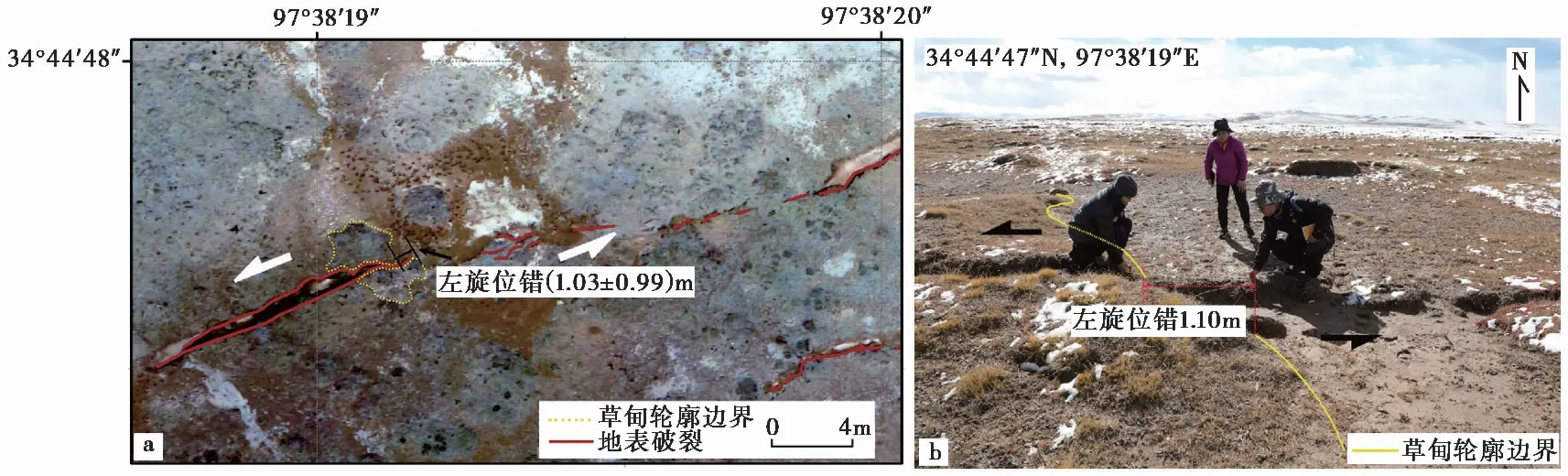
图 8 草甸左旋位错的影像解译(a)及现场实地测量结果(b)Fig. 8 Image interpretation(a)and field measurement(b)of left-lateral offset in meadow.

3.2 基于高精度DEM获取垂直位错数据
为获取更精细的地表破裂垂直位错数据,我们利用大疆Phantom 4 Pro V2.0无人机,对多个破裂变形最显著地区的地形地貌信息进行了采集,图9a 为所选择的一个数据采集的区域。我们在目标区域内均匀布设了一定数量的地面控制点,并使用RTK(Trimble R8)精确测量了每个地面控制点的三维空间坐标。数据采集时将飞机的飞行高度设置为50m,将影像的纵向重叠度和旁向重叠度分别设置为75%和60%,共采集照片799张,覆盖的区域范围约为300m×300m,生成的DEM分辨率达3cm/pix。
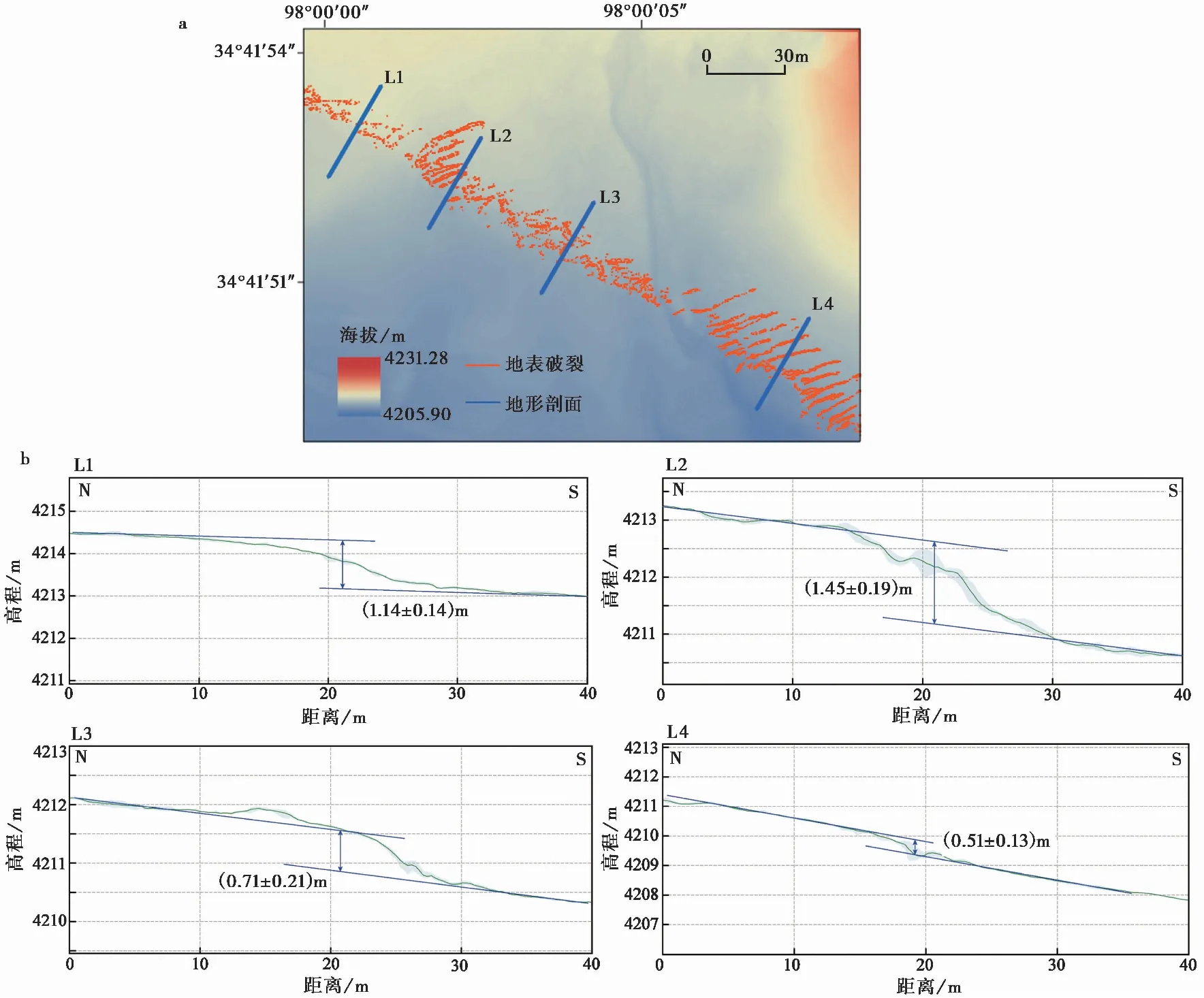
图 9 基于无人机摄影测量技术获取的高精度区域DEM(a)及垂直断错(b)Fig. 9 High-precision region DEM(a)and vertical offset(b)obtained by UAV photogrammetry.

无人机摄影测量技术获取的DEM分辨率可达厘米级,与常用的如SRTM DEM(90m)和ASTER DEM(30m)相比,精度大大提高。从该方法获取的高分辨率地形地貌数据中能够精准识别微小的断错特征,并清晰地展现出在常用DEM上无法识别的亚米级垂直断错地貌。无人机摄影测量技术极大地提高了位错测量的准确性,并实现了对断层几何及断错地貌的高清晰度三维再现。
3.3 地表破裂三维结构特征的室内重建
在野外选择典型的地表破裂,如挤压阶区、张裂隙和挤压鼓包等,利用iPhone 12 Pro激光雷达扫描仪(LiDAR)对其三维结构特征进行采集,并开展多角度扫描,以保证结构特征信息采集的完整性。回到室内后,应用智能设备上的3D Scanner app对图像进行优化处理,完整地3D还原“现实物体”,将这些虚拟模型置于AR场景中完成成像(图10a,b),从而实现对地表破裂、挤压鼓包三维结构的室内重建。
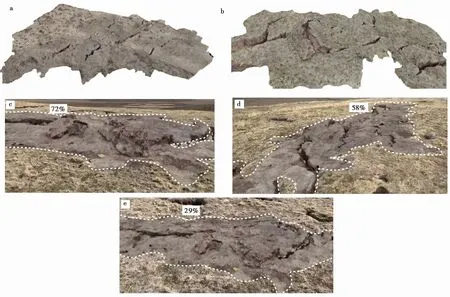
图 10 地表破裂、挤压鼓包的AR成像图Fig. 10 AR imaging of surface ruptures and pressure ridges.a、b 地表破裂、挤压鼓包的室内AR成像; c—e 地表破裂、挤压鼓包的野外AR成像
将3D Scanner app生成的模型置于野外环境中,由图10c—e可见,模型画质清晰度较高,可任意转换角度、成比例缩放、自由移动使用,且模型能够真实反映地表破裂、挤压鼓包的特征及细节信息,形成了与野外现场实地观测相同的效果,使人仿佛亲临现场。这一全新的技术手段为今后的地质教学及科研工作提供了一种新的思路。
这种无需任何事先准备即可创建近距离环境3D模型的技术,为在高空间分辨率条件下快速扫描中小型地貌(厘米到数百米)的形态特征提供了一种新颖、经济、省时的替代方案。此外,其便捷的数据处理方式、高效的应用程序以及数据的通用性,也使相关科研单位能够更快捷准确地监测野外环境变化,为管理决策提供及时数据,这一技术值得在地貌学、地质学、林业等诸多地球科学学科及其他相关领域中推广应用。
4 结论与展望
本文以2021年5月22日玛多MW7.4 地震为例,介绍了利用无人机摄影测量技术对地震地表破裂特征信息进行快速提取,以及使用移动智能设备搭载的LiDAR对地表破裂三维结构进行室内重建的方法。本文为大地震发生后基于摄影测量技术快速提取发震断层的地表破裂分布、结构与特征等定量参数提供了可行、高效和科学的技术方法,并探讨了摄影测量技术在进一步研究和应用中的广阔前景。获得的主要认识如下:
(1)通过无人机摄影测量技术,在较短时间内获得了全段地表破裂的正射影像,以及多个形变复杂区域的厘米级分辨率数字高程模型,很好地保留了同震地表破裂的原始面貌,满足了地震后快速获取同震地表破裂带特征的需要。
(2)通过无人机摄影测量技术获取的照片数据可生成厘米级分辨率的数字高程模型DEM和数字正射影像DOM,能够快速准确解译地表破裂的特征并提取相关参数。通过影像解译结果可知,基于正射影像得到的水平位错结果与实地测量的结果一致,获取的DEM能够精细识别亚米级的垂直断错地貌,大大提高了精度。以上工作证明了无人机摄影测量技术所得数据的真实性和可靠性。
(3)移动智能设备iPhone 12 Pro搭载LiDAR激光雷达扫描仪所完成的地表破裂、挤压鼓包的室内重建结果令人满意,AR成像模型可高度融合于实景当中,达到了“几乎无法区分真假”的地步。该技术是目前野外可实现的最快捷、最方便的3D模型采集方式。
尽管摄影测量技术目前还存在着一定的局限性,如飞行平台续航时间较短,易受天气、海拔等因素影响,在植被茂密区域的航拍效果不理想等,但相信随着技术的进步,这些问题都将得到解决,摄影测量技术将会成为活动构造定量化、精细化研究中的一种重要的技术手段。
致谢评审专家对本文进行了认真审阅,并给出许多有益的修改意见; 青海省地震局、成都纵横自动化技术有限公司和兰州大学地质科学与矿产资源学院在数据采集过程中给予了支持和帮助。在此一并表示感谢!