星载光谱仪光路切换组件振动特性仿真分析
2022-06-10石磊赵欣刘凤垒司福祺
石磊,赵欣,刘凤垒,司福祺
(1中国科学院合肥物质科学研究院安徽光学精密机械研究所,中国科学院环境光学与技术重点实验室,安徽 合肥 230031;2中国科学技术大学,安徽 合肥 230026)
0 引言
航天器相关仪器转动部件的失效已经取代电子学故障成为航天器在轨故障的重要诱因之一,也是影响航天器运行寿命和可靠性的关键因素,因此需在航天器设计阶段对其转动部件的可靠性进行重点关注。星载差分吸收光谱仪通过探测大气痕量气体的差分吸收光谱反演从而获取大气污染成分(如O3、NO2、SO2等)的时空分布信息[1−4],光路切换组件是星载光谱仪中的关键转动部件,能够实现光学凹面镜转入、转出主光路等功能,其性能的稳定性与可靠性直接影响星载光谱仪光学系统的功能。
在轨运行时,星载光谱仪光路切换组件将经受各种不同力学环境的影响,这些影响可能造成活动部件轴系损伤,导致活动部件定位精度下降,进而无法保证光谱仪完成定标功能。因此,力学性能分析和试验验证是星载光谱仪光路切换活动部件研制过程中必不可少的重要环节。
为了满足星载设备的高可靠性需要,本文利用有限元分析软件对核心部件进行力学仿真和整机振动试验,验证了活动部件力学环境适应性。在振动试验前和试验后,测试光机头部光谱分辨率,并进行光谱位置对比、卤素灯强度对比,间接反映活动部件定位精度和重复定位精度性能;解决了由于活动部件已经安装在光机头部中无法直接测量活动部件定位精度,从而无法确定活动部件振动试验后其定位精度是否满足要求的问题,验证了系统在复杂空间力学环境中的可靠性。
1 光路切换组件随机振动分析方法
随机振动在时域上是不确定的,无法用确定性函数描述,因此一般采用概率统计方法来定量描述。随机振动分析是基于概率统计将时间历程的统计样本转变为功率谱密度函数的谱分析方法[5,6]。
1.1 光路切换组件结构组成
光路切换组件由光路切换和太阳挡板两个转动部件通过钛合金连接板构成整体,再固定安装在光学箱体内侧壁上。其中太阳挡板部件主要实现遮挡、打开太阳光通道的作用,由步进电机、电机座、挡板、配重块等组成;光路切换部件主要实现将凹面镜转入、转出主光路的作用,由步进电机、电机座、凹面镜支撑轴系等组成。
光路切换组件结构复杂,为了提高计算速度,对其模型进行适当简化。忽略较小的圆角和倒角、不重要的凹槽和凸起等特征,除支撑座底部的安装固定螺纹孔外,其余螺纹连接简化为节点直接合并。模型使用的材料属性如表1所示。表中列出了光路切换组件中各个零件使用的材料的密度ρ、弹性模量E、热膨胀系数α、热导率λ。对模型进行网格划分,得到其有限元模型如图1所示,节点数为224362,总单元数为478559。

表1 光路切换组件的材料属性Table 1 Material properties of optical path switching assembly

图1 光路切换组件有限元模型Fig.1 Finite element model of optical path switching assembly
1.2 光路切换组件随机振动响应分析方法
分析过程中,首先确定研究的光路切换组件为线性系统,即所要计算的结构具有恒定的材料参数属性,总体刚度、弱阻尼及质量矩阵为定值。
单自由度线性系统在受到外界随机力F(t)激励后的动力方程为

式中m、c、k分别表示系统的质量、阻尼和刚度,x¨、x˙、x表示加速度、速度和位移。
系统的响应特性可用脉冲响应函数h(τ)描述,即

响应的自相关函数为

则输出的功率谱密度Sx(ω)为

对于单一输入谱密度值(PSD),系统输出的谱密度响应Sout(ω)与系统输入谱密度激励Sin(ω)的关系为

式中aout为单自由输出,ain为单自由输入。
多个独立不相关的谱密度输入时,采用SRSS方法得到输出谱密度响应Sout(ω)与系统输入谱密度激励Sin(ω)的关系为

2 随机振动仿真分析
2.1 振动输入边界条件的确定与系统输入谱密度激励
随机振动试验的试验条件包括频率范围、加速度功率谱和试验持续时间,加速度功率谱确定后,就可以计算出加速度总均方根值。选择的频率范围和加速度谱密度量级应包含广泛的应用范围[7−9],具体范围根据卫星平台总体单位下发的星载仪器环境试验要求确定。在应用中,用于试验样品的试验条件应根据试验样品在运输或运行时所承受的环境条件来确定。根据卫星平台总体单位给定的星上载荷的力学环境试验条件,星载光谱仪随机振动试验条件如表2所示。

表2 星上载荷随机振动试验条件Table 2 Random vibration test conditions of on-board load
为得到具体的加速度功率谱曲线图,根据给定的随机振动试验条件表,通过谱形参数计算方法计算出加速度功率谱密度(PSD)值,并确定总均方根加速度Grms。复杂的谱形可以分解成简单的谱形分别进行计算,求其总均方根值。
倍频程Oct通过上、下限频率的比值来确定,其计算公式为

式中fH为上限频率,fL为下限频率。
由谱形图中加速度功率谱密度的定义,得到斜率m为

式中谱值增量dB的计算公式为

式中PH为fH对应的加速度功率谱密度,PL为fL对应的加速度功率谱密度。
根据式(7)、(8)、(9)可以推出:

简化即得到PH、PL的计算公式,即

进一步,用积分的形式求得单段谱所包含的面积A为

总均方根加速度是加速度功率谱密度曲线下总面积的开方,即

根据谱形参数计算方法计算得到功率谱曲线图,如图2所示。

图2 输入加速度功率谱密度曲线Fig.2 The input curve of acceleration power spectral density
2.2 模态分析
运用有限元方法进行模态计算,其计算输出结果为固有频率和模态振型,模态计算结果表征了活动部件的固有特性,是后续随机振动分析的基础。其仿真结果可得到结构在外部激励时产生共振的频率,以及此时结构的相对变形,为之后分析工作提供数据支撑[10−11]。光路切换组件通过连接板上19个螺纹孔与光学箱体连接,将模型中19个螺纹孔对应的节点设为固定约束。采用Lanczos法对组件进行模态分析,提取该组件系统的前4阶模态(如图3所示)。

图3 光路切换组件前4阶模态。(a)1阶;(b)2阶;(c)3阶;(d)4阶Fig.3 The first 4 modes of optical path switching assembly.(a)1st order;(b)2nd order;(c)3rd order;(d)4th order
根据仿真分析结果对前四阶振型进行描述:一阶振型为挡光板沿X方向摆动,频率553.04;二阶振型为挡光板沿Z方向摆动,频率1036.7;三阶振型为挡光板沿X方向弯曲,挡光板尾端翘曲量较大,频率1360.7;四阶振型为光路切换组件安装板沿X方向弯曲,频率1684.1。光路切换组件基频都较高,满足基频大于100 Hz的要求,表明该组件结构的动态刚度满足要求。
2.3 随机振动响应结果分析
根据振动试验标准中的相关规定,需要对设备沿相互正交的三个轴向分别进行振动试验。在仿真分析中,对连接板约束处分别施加X、Y、Z方向的加速度功率谱激励。光路切换组件在各个方向激励下的加速度和等效应力云图分别如图4、5所示。

图4 光路切换组件X(a)、Y(b)、Z(c)方向加速度云图Fig.4 Acceleration cloud atlas of optical path switching assembly in X(a),Y(b),Z(c)directions

图5 光路切换组件X(a)、Y(b)、Z(c)方向等效应力云图Fig.5 Stress cloud atlas of optical path switch assembly in X(a),Y(b),Z(c)directions
仿真结果显示在X、Y、Z三个正交方向下,光路切换组件的最大应力均发生在凹面镜安装挡板的轴承安装处,各方向下的加速度和应力响应最大值结果如表3所示。
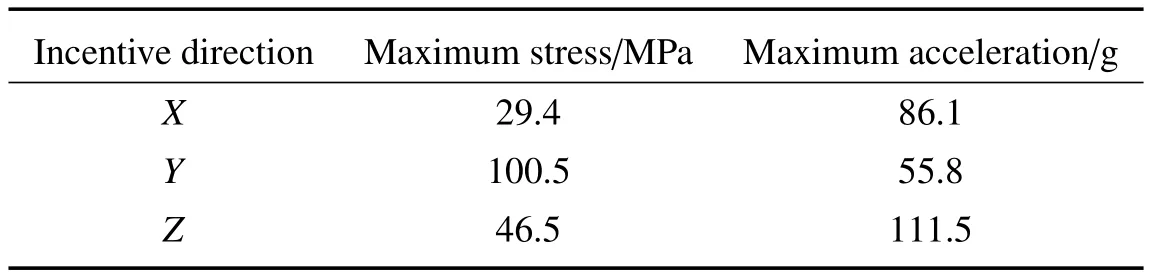
表3 光路切换组件随机振动响应结果Table 3 Random vibration response results of optical path switching assembly
对于屈服强度极限载荷条件,轴系结构安全裕度应为正,强度校核的计算公式为

式中MS为安全裕度,Sa为许用应力(屈服极限、强度极限等除以安全系数,此处取1.35),Se为鉴定载荷应力。
光路切换组件最大等效应力为100.5 MPa,钛合金TC4材料的屈服应力约为350 MPa,最小安全裕度范围为0∼0.25。经计算得到MS=1.57>0.25。说明光路切换组件有足够的安全裕度,能够承受模拟随机振动载荷。
3 试验验证
3.1 星载光谱仪整机振动试验
试验验证是产品设计中至关重要的阶段,振动试验是用来检验设备耐振性能的可靠手段,同时也是对仿真分析结果的比对验证。对该光谱仪系统分别进行三个正交方向振动环境试验,试验条件与仿真分析条件设置一致。
表4是星载光谱仪正弦扫频振动试验条件。表中Vibration level在5 Hz到12 Hz之间是通过正弦振动振幅位移量来表示的,其余频率区间通过重力加速度(g)来表示。图6是星载光谱仪安装在振动台上进行振动试验的现场照片。图7是星载光谱仪X、Y、Z三个方向正弦扫频振动控制点加速度曲线图,可以看出输入的振动试验条件满足要求。

图6 星载光谱仪整机振动试验Fig.6 Vibration test of the space-borne spectrometer

表4 星载光谱仪正弦扫频振动试验条件Table 4 Sine Sweep Vibration Test Conditions for space-borne spectrometer

图7 星载光谱仪X(a)、Y(b)、Z(c)三个方向正弦扫频振动控制点加速度曲线图Fig.7 Control point acceleration curve of X(a),Y(b),Z(c)direction frequency analysis
图8为光谱仪箱体上监测点处X、Y、Z三个方向预振与复振加速度曲线,可看出预振与复振曲线图无明显变化,说明正弦扫频前后星载光谱仪结构没有明显变化。
振动试验完成后,检查星载光谱仪内部各组件结构,均正常完好,无明显变形裂纹松脱等现象。

图8 光谱仪箱体上监测点处X(a)、Y(b)、Z(c)三个方向预振与复振加速度曲线Fig.8 Acceleration curves of pre-vibration and re-vibration in X(a),Y(b),Z(c)directions at the monitoring point on the box of spectrometer
3.2 振动后结果分析
因为条件限制,光路切换组件未单独做振动试验,仅随光机头部做整机振动试验,因此振动后只能通过载荷内置卤素灯强度曲线的光学指标来判断光路切换组件是否正常工作。如果振动后光路切换组件位置异常,那么在电机转动到定标光路位置后,卤素灯强度曲线就会明显异常。
光路切换组件共有两个位置,通过两个微动开关和转动步数确认是否到位。光路切换组件由步进电机驱动,步进电机可以以整步1.8◦步进或者半步0.9◦步进。光路切换组件振动前后,转动位置设定如下:1)电机从初始位置逆时针转动41步(73.8◦)到达定标光路位置;2)电机从初始位置逆时针转动使微动开关导通后,倒退8步到达定标光路位置。
为避免因其他光路造成的光学指标变化对光路切换组件的性能造成误判,先使用汞氩灯特征峰来判断振后主光路和光谱仪等性能是否正常,再通过内置卤素灯的强度来确认光路切换组件的性能。
具体测试过程如下:1)载荷调整至定标模式,打开定标窗口,汞氩灯照亮漫反射板,采集汞氩灯光谱,分析汞氩灯特征峰中心对应的像元编号,分析特征峰半高宽;2)载荷调整至内置卤素灯模式,点亮5 min左右后,采集卤素灯光谱,分析卤素灯强度曲线。
对比方法为:1)对比振动试验前后汞氩灯特征峰的中心位置差异、半高宽差异,选择空间维11个位置进行分析;2)对比振动试验前后卤素灯图像的空间维曲线、光谱维曲线变化。
3.2.1 光谱分辨率、光谱位置对比
通道1的253.652 nm特征峰的中心点位置、半高宽变化如图9所示。其中心点位置最大差异为0.52 pixel,特征峰半高宽最大差异为0.06 pixel。
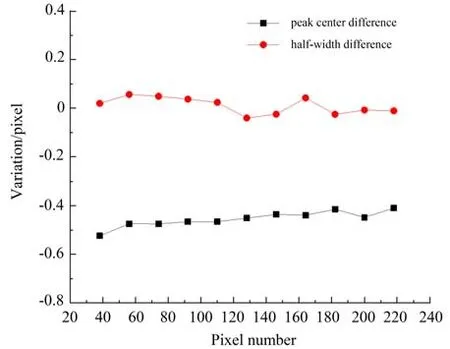
图9 振动前后通道1的253.652 nm峰中心和半高宽差Fig.9 The 253.652 nm peak center and half-width difference of channel 1 before and after vibration
通道2的312.56 nm特征峰中心点位置、半高宽变化如图10所示。其中心点位置最大差异为0.19 pixel,特征峰半高宽最大差异为0.13 pixel。

图10 振动前后通道2的312.56 nm峰中心和半高宽差Fig.10 The 312.56 nm peak center and half-width difference of channel 2 before and after vibration
通道3的546 nm特征峰的中心点位置、半高宽变化如图11所示。其中心点位置最大差异为0.49 pixel,特征峰半高宽最大差异为0.22 pixel。

图11 振动前后通道3的546 nm峰中心和半高宽差Fig.11 The 546 nm peak center and half-width difference of channel 3 before and after vibration
通道4的692 nm特征峰中心点位置、半高宽变化如图12所示。其中心点位置最大差异为0.57 pixel。特征峰半高宽最大差异为0.14 pixel。
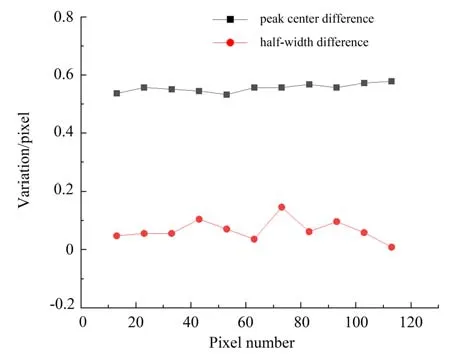
图12 振动前后通道4的692 nm峰中心和半高宽差Fig.12 The 692 nm peak center and half-width difference of channel 4 before and after vibration
表5汇总了振动试验前后四个通道的光谱响应变化。由对比结果可以发现,振动试验前后四个通道的光谱响应变化较小,包括特征峰中心点位置差异(CWL difference)、特征峰半高宽差异(FWHM difference)等特性在振动试验前后基本一致。存在的偏差认为是测量误差、温度差异、应力释放等造成光谱漂移所引起。

表5 振动试验前后载荷四通道光谱响应变化Table 5 Changes of four channel spectral response of load before and after vibration test
3.2.2 卤素灯强度对比
本载荷通道1为紫外通道,卤素灯响应太弱,未作数据对比。对其他三个通道的空间维和光谱维数据进行了对比和线性拟合分析,图13、14对应通道2卤素灯图像,图15、16对应通道3卤素灯图像,图17、18对应通道4卤素灯图像。

图13 振动前后通道2灯图像空间维的比较(第200列)。(a)数据对比;(b)线性拟合Fig.13 Comparison of spatial dimension of lamp image in Channel 2 before and after vibration(column 200).(a)Data comparison;(b)linear fit

图14 振动前后通道2灯图像光谱维的比较(第512行)。(a)数据对比;(b)线性拟合Fig.14 Spectral dimension comparison of channel 2 lamp images before and after vibration(line 512).(a)Data comparison;(b)linear fit
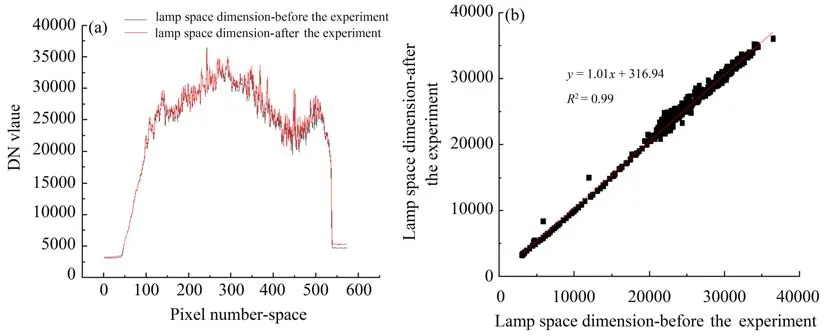
图15 振动前后通道3灯图像空间维的比较(第200列)。(a)数据对比;(b)线性拟合Fig.15 Comparison of spatial dimension of lamp image in Channel 3 before and after vibration(column 200).(a)Data comparison;(b)linear fit

图16 振动前后通道3灯图像光谱维的比较(第288行)。(a)数据对比;(b)线性拟合Fig.16 Spectral dimension comparison of channel 3 lamp images before and after vibration(line 288).(a)Data comparison;(b)linear fit
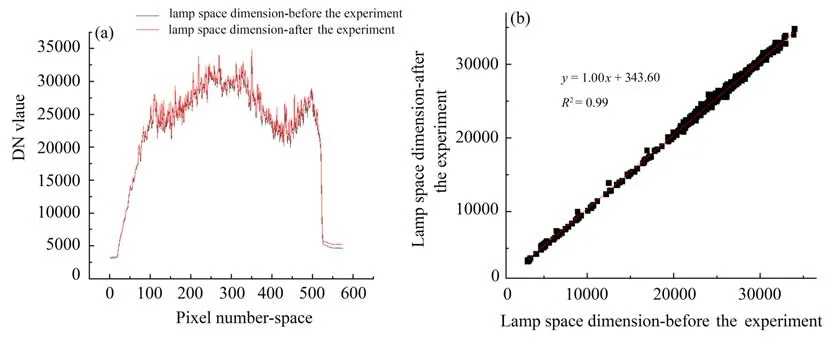
图17 振动前后通道4灯图像空间维的比较(第30列)。(a)数据对比;(b)线性拟合Fig.17 Comparison of spatial dimension of lamp image in channel 4 before and after vibration(column 30).(a)Data comparison;(b)linear fit
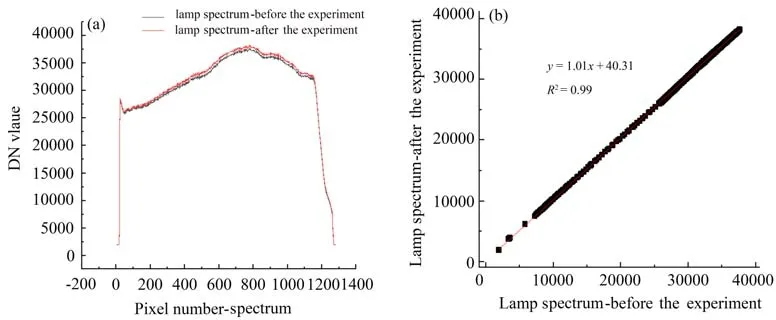
图18 振动前后通道4灯图像光谱维的比较(第288行)。(a)数据对比;(b)线性拟合Fig.18 Spectral dimension comparison of channel 4 lamp images before and after vibration(line 288).(a)Data comparison;(b)linear fit
由对比结果可知,在振动前后,三个通道的卤素灯图像的成像范围、光谱强度特性等基本一致。说明振动试验前后标准灯定标光路未发现异常变化,光路切换组件满足振动设计要求。
需要说明的是,在可见通道部分区域的卤素灯强度存在差异,约为1%∼2%,分析其原因:一方面,两次采集的环境温度存在不同,而环境温度会影响探测器响应、卤素灯发射曲线等;另一方面,由于定标光路的卤素灯开关、数据采集为手动控制,前后两次的采集时间存在差异,对应的卤素灯响应曲线可能存在差异。
3.2.3 步进电机相序及转动电流验证
如前所述,光路切换组件有两个位置,分别为主光路和定标光路。步进电机通过转动步数和触碰微动开关来确认是否到位。该步进电机为两相八拍驱动,到达主光路位置时,电机相序停在01(AB相),到达定标光路时,电机相序停在图19为振动后电机驱动光路切换组件100次转动结果,电机到位相序一致,说明光路切换组件工作正常,主光路和定标光路位置振动后未发生变化。光路切换组件在振动后,对电机的启动电流和到位后的保持电流进行了100次测试,如图20所示,启动电流波动范围在120∼140 mA之间,到位后电机保持电流在144 mA,与振动前数据测试一致。
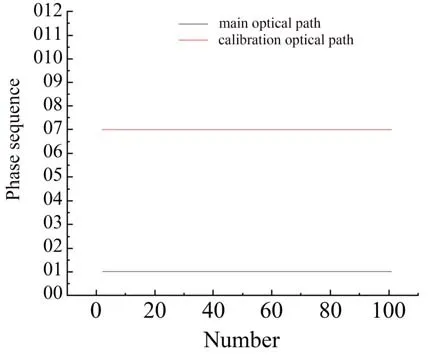
图19 步进电机相序Fig.19 Stepper motor phase Sequence

图20 步进电机转动电流Fig.20 Rotational current of stepper motor
4 结论
针对设计的某星载光谱仪光路切换组件,通过谱形参数计算方法得到边界条件,对其进行模态分析和随机振动分析。模态分析结果表明光路切换组件基频为553 Hz,远大于星载仪器振动环境的低频共振区,结构刚度满足要求。振动分析结果显示结构在Y向随机振动响应最大,最大等效应力值为100.5 MPa,强度校核计算该组件有足够的动态承载能力。最后通过振动试验和卤素灯强度曲线测试对比试验验证了仿真分析的可靠性。该方法可以为星载设备环境适应性研究提供参考和数据支撑。
