人工智能辅助手术规划系统在个体化全髋关节假体精准植入中的应用
2022-06-10万超董圣杰王诗军张逸凌刘星宇杨克建赵宇驰
万超 董圣杰 王诗军 张逸凌 刘星宇 杨克建 赵宇驰
全髋关节置换术(total hip arthroplasty,THA)目前被认为是治疗髋关节终末期骨性关节炎(osteoarthritis,OA)、股骨头坏死(osteonecrosis of the femoral head,ONFH)、髋关节发育不良(developmental dysplasia of the hip,DDH)及头下型股骨颈骨折(femoral neck fracture,FNF)并完全移位等疾病最有效的方法,疗效确切,应用广泛。然而,THA术后发生的肢体不等长或者旋转中心、偏心距的不良重建会导致髋关节软组织失衡、跛行步态、假体异常撞击、脱位等,增加人工关节的磨损[1]。
THA 术前规划与模板测量能为术者个性化选择假体类型、预测假体安放位置及型号提供参考,减少术中的失误和偏差。目前,国内术前规划仍普遍以X线片模板测量或数字化二维模板测量的方式进行,但是二维平面模板和X 线片放大率的一致性不佳[2];术前X 线摄片时对骨盆和股骨的投照角度不标准[3-4],往往导致术前规划不准确、安放假体大小不匹配、位置不良,造成较高的THA 术后并发症发生率[5-6]。
本研究应用一款国内自主研发的人工智能辅助规划系统(AIHIP,北京长木谷医疗科技有限公司)进行THA术前规划,并将其与传统胶片二维模板规划的方法进行比较,旨在进一步验证人工智能辅助手术规划系统在个体化全髋关节假体植入中应用的准确性。
资料与方法
一、纳入标准与排除标准
纳入标准:①诊断为髋关节OA、DDH 合并OA、晚期ONFH 关节功能障碍以及年龄大于60 岁的FNF 并完全移位病人;②接受单侧初次生物型THA治疗;③非手术侧髋关节发育、结构、功能均正常;④年龄>18岁,性别不限。
排除标准:①有明显重要脏器功能障碍,凝血功能异常,精神类疾病、交流障碍,酒精和药物滥用,患肢神经肌肉疾患,因发育、创伤等原因造成双侧股骨、胫骨绝对长度不等以及对本研究任何一种药物过敏或存在用药禁忌的病人;②不能配合完成术前及术后标准的双髋正位X 线检查;③未能签署知情文件、不能理解或填写研究中相关问卷的病人。
二、一般资料
回顾性收集2019 年10 月至2021 年2 月烟台市烟台山医院采用人工智能辅助手术规划系统进行THA术前规划的44例(44髋)纳入人工智能组,选择同期采用传统胶片模板二维测量进行THA 术前规划的44 例(44 髋)纳入传统模板组。两组病人的一般资料比较,差异无统计学意义(P>0.05,表1)。

表1 两组病人术前资料比较
两组病人术前均拍摄双髋关节正位和患侧髋关节侧位X 线片,人工智能组另行全骨盆和双侧股骨近1/2段的横断面CT扫描。所有手术假体选择生物型Pinnacle 髋臼杯系统、Corail 股骨柄(强生Depuy,美国)。Corail 假体在设计上按照颈干角度和偏心距不同,有标准柄、高偏柄和内翻柄可供选择。本研究经过烟台市烟台山医院伦理委员会审查(烟山伦准:2021032号)通过。
三、影像数据获取
(一)X线摄片
病人仰卧于检查床上,保持髋膝关节伸直中立位,下肢内旋15°以便更好地抵消股骨颈的前倾角度并准确地投照出真实的股骨颈长度和颈干角度[7],因患侧肢体手术前存在不同程度疼痛和活动受限,手术前摄片需至少保证非手术侧肢体完成以上体位要求。
采用Philips X线机(Digital Diagnosis 4,荷兰)进行摄片。X 线投影中心对准耻骨联合,球管距病人高度保持1 000 mm,摄片范围包括双髋及股骨近段400 mm。球管电压:66 kV,球管电流:16 mAs,曝光时间:80 ms。数字化影像采集由锐珂医学影像采集系统(Carestream Vue PACS,加拿大)完成。
传统胶片组病人在术前X 线检查前,由术者将正球形金属标记物(直径20 mm)临时固定于非手术侧股骨大转子尖端水平,目的是在病人平卧位时使金属标记物与髋关节保持同一水平高度,进行X 线摄片时将该金属标记物的影像同时呈现在双髋关节正位X线片中。金属标记物与髋关节处于同样的投照高度,在数字化X 线影像中可以作为标定X 线放大率的参照,校准X 线影像的放大率使其与传统胶片模板的放大率保持一致。
(二)CT扫描
采用GE Revolution 256 排螺旋CT 机(General Electric Company,美国)。扫描电压:120 kV,矩阵:512×512,螺距:0.992,扫描层厚:1.25 mm。扫描范围:从骨盆上缘至股骨小转子下40 cm。影像资料以DICOM格式显示及保存于可移动硬盘内。
四、人工智能辅助三维规划方法
(一)CT数据重建、智能分割与测算
术前CT 原始数据上传至AIHIP 软件进行三维图像重建。重建后的骨盆及双侧股骨可放大和缩小,在360°空间范围内任意旋转,且可以同时在一个界面上显示三维图像、横断面图像、矢状面图像和冠状面图像。软件使用自主研发的人工智能深度学习卷积神经网络——G-NET[8]对CT影像数据骨骼区域进行智能识别,并对骨盆及股骨区域进行智能分割,以便更清晰地观察股骨头和髋臼的形态与缺损情况。
AIHIP软件采用点云渲染技术来实现骨盆的表面成像,得到光线渲染后的骨盆正投影图像,再利用点识别算法进行更高精度、更迅速的定位,识别髋关节对应的骨盆和股骨相关解剖部位,主要包括骨盆髂前上棘、耻骨联合、股骨小转子及大转子等骨性标记点,并根据双侧髂前上棘与耻骨联合识别点构成的骨盆前平面,纠正骨盆的左右或前后方向的倾斜或旋转,将骨盆矫正至中立位。骨盆左右倾斜矫正的依据为将双侧髂前上棘调整至与水平面等高,并使骨盆旋转将耻骨联合与骶骨中点调整为垂直于水平面的一条线上;骨盆前后倾斜矫正的依据为参考髂嵴-坐骨连线与身体中轴线平行。定义髋臼杯在冠状面与水平面的夹角为髋臼杯外展角,横断面上髋臼杯与耻骨联合及骶骨中点连线的夹角为髋臼前倾角。股骨位置矫正的原则是:以股骨头为旋转中心进行髋外展,使股骨髓腔轴线与人体中轴线保持平行,并沿股骨髓腔轴线进行股骨旋转使股骨小转子距离人体中轴线的距离最短,定义股骨小转子在冠状面的高度差值为双下肢长度差,股骨冠状面内的髓腔轴线与身体中轴线的距离为联合偏心距。
AIHIP 软件通过对骨骼的快速重建,解剖关键点的快速准确识别,以及相关参数的智能计算,模拟出手术前标准的骨盆及双侧髋关节正位X 线影像,为匹配假体种类、型号、角度作好准备。CT 数据重建、智能分割与测算过程如图1所示。

图1 一例左侧髋关节发育不良并骨关节炎的三维重建图像 a:同时显示横断面、矢状面、冠状面图像;b~d:人工智能分割骨盆和股骨后髋臼在侧方、前方、后方位视角观察的重建图像;e:分割后单独观察股骨的重建图像;f:模拟标准骨盆和股骨正位X线影像,计算出病人术前双侧联合偏心距差值为10 mm、下肢长度差值为21 mm,健侧股骨颈干角为125°
(二)髋臼和股骨假体建模和智能模拟安放
收集假体髋臼杯、球头、内衬、股骨柄尺寸数据,进行逆向工程,AIHIP软件中转化为三维模型,构建髋关节假体数据库。软件按照上述校正后的骨盆坐标系,以外展45°、前倾25°模拟安放臼杯假体,在CT影像图像上显示已导入假体的轮廓线,系统实时测算并显示臼杯假体骨质覆盖率。根据股骨髓腔直径智能匹配股骨柄型号规格,模拟植入假体位置,模拟股骨颈截骨,确定截骨线至股骨小转子上缘的距离。根据双下肢长度差值以及偏心距差值智能匹配适当球头。术者在术前可以通过AIHIP软件对规划的髋臼杯和股骨柄安放位置、型号、角度进行微调。髋臼和股骨假体建模以及智能模拟安放过程如图2所示。
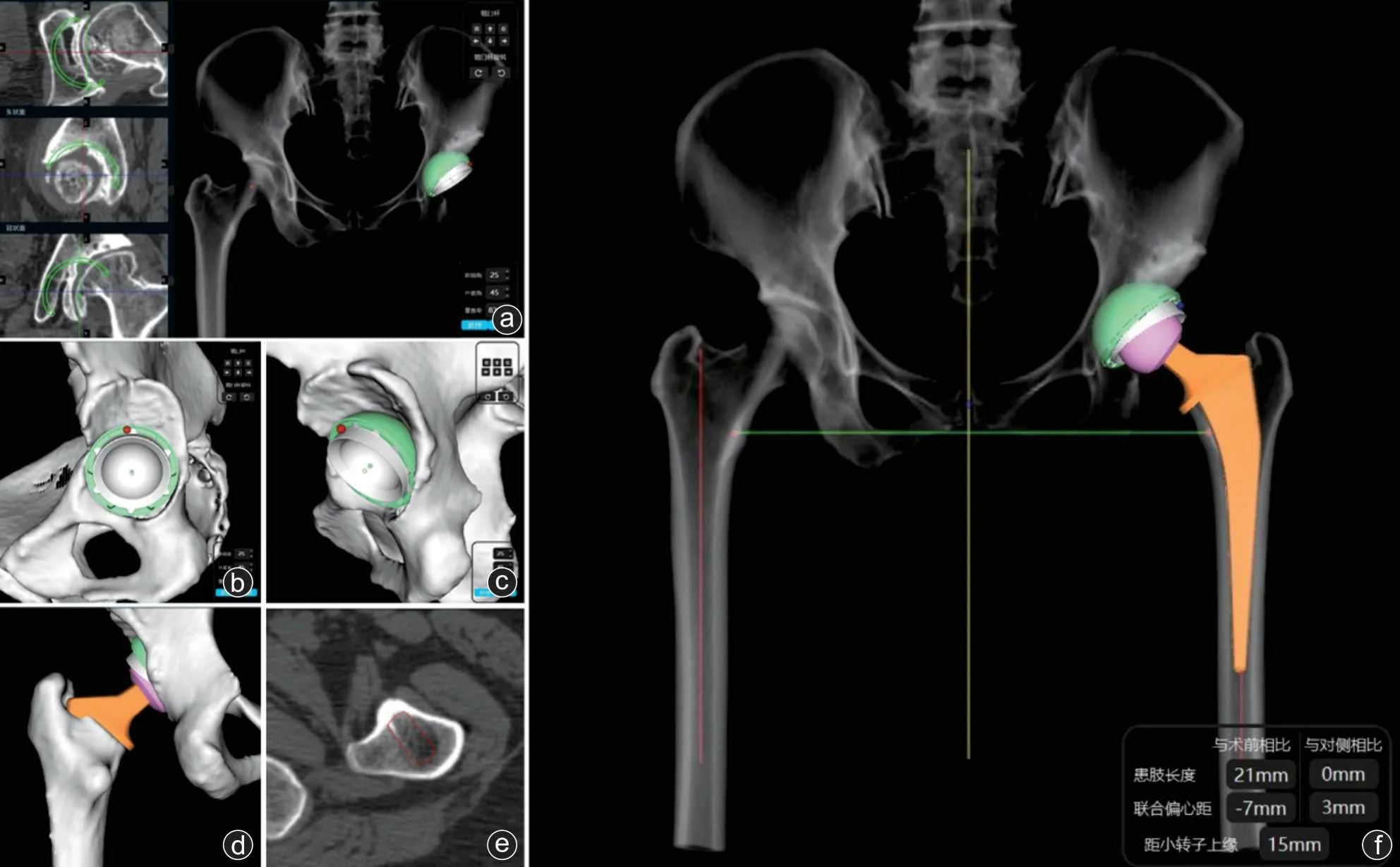
图2 模拟安放臼杯系统和股骨柄后的三维重建图像 a:同时显示横断面、矢状面、冠状面图像,并智能测算出髋臼假体与宿主骨覆盖率为83%;b、c:髋臼杯在侧方、后方位视角观察的重建图像,可以直观地看到臼杯植入后有明显骨缺损;d:股骨柄模拟植入后,后方观察股骨颈截骨位置的三维图像;e:横断面观察股骨柄模拟植入后与股骨髓腔的匹配情况;f:假体模拟植入后,双侧联合偏心距差值为3 mm、下肢长度差值为0 mm,股骨颈截骨面距离小转子上缘距离为15 mm,建议选择颈干角为125°的Corail内翻柄
五、传统胶片模板二维测量方法
利用我院Carestream Vue PACS 获取传统模板组病人的术前X 线影像,因为研究中使用的胶片模板所标定的放大率是120%,所以在PACS 系统中,效仿Conn 等[7]的方法校准X 线影像的放大率,即将X线中金属标记物的正球形影像直径调整至相同的放大率,然后将模板叠加于数字化X 线影像非手术侧髋关节影像上进行常规胶片模板测量。
测量由一名住院医师和一名高年资主治医师在术前不同时间点进行并记录,两名医师对彼此测量结果互不知情。当出现两名医师对同一位手术病人术前测量假体型号不一致时,由术者在术前单独裁定预测的型号。
六、手术方法
手术均由同一位高年资医生在全身麻醉下、统一选择后外侧手术入路完成。全身麻醉下病人取侧卧位,患侧在上作后外侧切口,长约12~15 cm。切开皮肤及皮下组织,切开阔筋膜,钝性分离臀大肌,适当剥离外旋肌群,切开后关节囊,屈曲、内收、内旋关节脱位。术者参考术前股骨颈截骨位置的预测,术中用无菌钢尺测量确定股骨颈截骨位置,切除股骨头,然后显露髋臼,切除髋臼盂唇,找到髋臼横韧带、卵圆窝顶点和底部作为磨锉髋臼的参照。打磨髋臼至合适深度,根据术前测量预测和术中压配情况选择合适髋臼假体型号植入,髋臼杯安放角度利用简易导向器械辅助进行(图3)。然后进行股骨近端截骨面的开口并用股骨髓腔锉依次磨锉髓腔,参考术前规划建议的股骨柄类型和股骨头颈长,结合术中股骨髓腔锉实际压配情况选择合适的球头试模,关节复位测试稳定性满意,了解关节活动度、周围肌肉紧张度,“C”型臂X线机确定假体试模位置满意后安装假体。冲洗切口、充分止血后,修补关节囊和外旋肌群。关节囊内注射氨甲环酸(2 g,20 mL)促进创口止血,常规不放置引流管,逐层缝合切口。

图3 术中图片 a:后外侧入路THA过程中,用钢尺测量股骨颈截骨面到小转子上缘的距离;b:髋臼杯植入时所使用的定位导向杆
七、术后相关处理
两组病人术中镇痛、止血措施及术后预防感染和血栓、术后镇痛等治疗方案均保持一致。术后24 h内指导病人习步架辅助下地行走和功能锻炼,术后4 周内进行手术侧髋关节外展保护防止假体脱位,术后4~6周指导病人脱离辅助器械行走锻炼。
八、术后观察指标及影像测量方法
比较两组病人术前计划与实际假体安放型号,以相差1个型号及完全吻合视为术前计划与实际吻合,计算吻合率[9-10]。结合术后双髋关节前后位X线影像,效仿Sato等[11]的方法,使用Image-Pro Plus(版本号:6.0.0.260)软件测量两组病人术后偏距差、腿长差、髋臼杯外展角度以及患侧股骨小转子上缘距离股骨距截骨线的距离(图4),测量人员未参与病人的术前评估、手术及术后治疗。随访期间采用Harris评分、关节遗忘评分(forgotten joint score,FJS)评价术后髋关节功能恢复情况。由康复医生记录两组术后功能评分及并发症发生情况,康复医生对病人术前应用的评估方法并未知情。
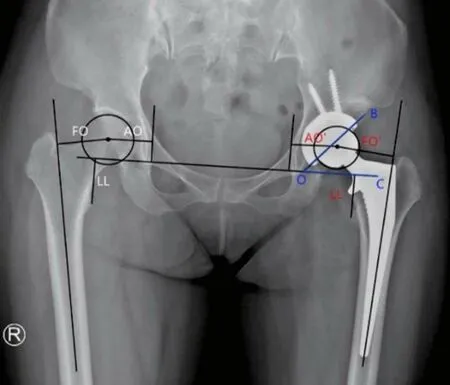
图4 图示左侧THA术后X线影像,标记出双侧泪滴下缘连线,测量非手术侧股骨头旋转中心到泪滴内缘水平的垂直距离AO和到股骨髓腔中心轴线的垂直距离FO,AO+FO即非手术侧的联合偏心距,同法测量手术侧的AO’和FO’。(AO+FO)-(AO’+FO’)即两侧联合偏心距的差值。非手术侧股骨小转子上缘与双侧泪滴下缘连线的垂直距离定义为LL,手术侧定义为LL’,LL-LL’即手术后两侧腿长的差值。∠BOC即髋臼杯的外展角度
九、统计学方法
利用SPSS 20.0软件(IBM公司,美国)进行统计学分析,计量资料采用均数±标准差(±s)表示,组间比较采用独立样本t检验,组内手术前后数据的比较采用配对t检验;计数资料以率表示,组间比较采用χ2检验或Fisher确切概率法。一致性分析采用Kappa检验。检验水准取双侧α=0.05。
结 果
一、假体型号预测的准确性
人工智能组髋臼杯和股骨柄假体型号的预测吻合率分别为95.5%(42/44)、88.6%(33/44),均高于传统模板组的75.0%(39/44)、65.9%(29/44),组间比较,差异有统计学意义(χ2=7.311,P=0.007;χ2=6.471,P=0.011;表2)。

表2 两组假体型号预测吻合率的比较(例)
二、传统模板组两名医师测量结果的一致性评价
传统模板组两名医生针对髋臼侧和股骨侧假体型号预测的Kappa检验值分别为0.0553 和-0.0265,说明两名医生对同一组手术病人术前假体型号预测的一致性差。
三、手术后影像学测量的比较
两组髋臼杯外展角的规划值均为45°,传统模板组和人工智能组的实际值分别为38.68°±4.33°,40.39°±4.74°,组内分别与规划值比较,差异有统计学意义(t=9.667,P<0.001;t=6.447,P<0.001)。传统模板组股骨颈截骨位置的规划值为(8.86±2.25)mm,实际值为(10.75±3.62)mm,差异有统计学意义(t=3.406,P=0.001);人工智能组股骨颈截骨位置的规划值为(8.45±3.26)mm,实际值为(10.97±3.04)mm,差异有统计学意义(t=3.849,P<0.001)。
人工智能组手术后偏心距和肢体长度的差值均较传统模板组更小,且差异有统计学意义(P<0.05,表3)。
表3 两组术后偏距差和肢体长度差的组间比较(±s,mm)

表3 两组术后偏距差和肢体长度差的组间比较(±s,mm)
组别传统模板组人工智能组t值P值例数44 44--偏心距差值7.18±3.29 4.73±2.97 3.669<0.001肢体长度差值5.51±2.56 3.42±2.32 4.013<0.001
四、术后随访
手术并发症方面,两组各有1 例手术中发生股骨柄植入时股骨距局部骨质劈裂骨折,均进行钢丝捆扎处理,术后6 周以后逐渐开始患肢负重功能锻炼。另外,传统模板组出现1例手术后5天假体前脱位,给予麻醉下闭合复位成功,复位后患肢屈髋外展位保护6 周逐步开始下地负重康复训练。随访期间,两组病人均无感染、异位骨化、假体松动等并发症发生。
传统模板组平均随访12 个月(2.8~22.8 个月),人工智能组平均随访9 个月(3.0~15.5 个月)。末次随访时,传统模板组和人工智能组的Harris 评分分别为(80.29±2.89)分、(80.95±3.23)分,FJS评分分别为(81.25±5.48)分、(82.13±4.29)分,组间比较,差异均无统计学意义(P>0.05)。
讨 论
一、人工智能辅助三维规划系统在测量精度和效率方面的优势
本研究结果验证,AIHIP 规划系统对髋臼侧和股骨侧假体型号预测吻合率均显著高于传统模板组。Schiffner等[10]学者利用数字化二维和三维两种不同模板测量软件进行对比研究,结果显示三维测量组的吻合率高于二维测量组(髋臼杯:86.2%vs.80.1%,P=0.01;股骨柄:94%vs.83.6%,P=0.01)。Huo 等[12]的一项前瞻性研究中,利用AIHIP 软件、3DMimics 软件以及2D数字化模板测量方法对同一组研究对象进行术前规划,按照以相差1 个型号及完全吻合视为术前计划与实际吻合,计算吻合率,结果同样提示三维规划测量对假体型号预测的准确率更高。
THA 术前规划的目的是最大限度恢复双下肢等长、重建患侧肢体偏心距,单纯股骨偏心距无法反映臼杯位置的变化,联合偏心距是在股骨偏心距基础上,增加了股骨头旋转中心至垂直于泪滴连线切线的距离。Robinson等[13]和Mahmood等[14]的研究表明,有效重建联合偏心距可以更好地恢复下肢功能。追溯以往国外的研究结论,偏距差和下肢长度差控制在5 mm 或者6 mm 以内,可以有效减少人工关节的磨损、避免臀中肌无力、改善术后髋关节活动度及下肢步态[11,15-17]。本研究两组病人术后X 线影像测量结果提示人工智能组术后偏距差和下肢长度差更小(P<0.05),且均控制在5 mm 以内。三维测量方法对假体型号预测和肢体长度、偏心距重建的精度明显高于二维测量方法,得益于其不受放大率的干扰,测量时骨盆和股骨的方向可以有效矫正,其中,股骨的位置矫正对二维测量精度有直接影响,因为二维影像是对骨骼的前后位投影所得,股骨的内外旋转会造成投影出的股骨颈长度和颈干角度不能体现真实的数据,从而影响术前评估和股骨假体的选择,这也可以解释研究结果中传统二维模板组下肢长度差、偏心距差值比人工智能三维组更大。
个体的股骨偏心距、颈干角存在较大的变化范围,在股骨自身解剖参数中,偏心距与颈干角显著相关,本研究中提供的生物型股骨柄有不同的设计特点:Corail 标准柄的颈干角为135°,不同型号标准柄颈长完全相同;高偏柄是在标准柄基础上单纯增加了7 mm 偏心距;内翻柄是在标准柄基础上减少了10°颈干角,使其较标准柄同样增加7 mm偏心距,同时内翻柄的锥度比标准柄垂降4 mm。这三种不同的设计是为了迎合个性化的生理颈干角度和偏心距。高偏柄和内翻柄均是高偏心距设计,均较标准柄增加了7 mm偏心距,如果术者在术前没有获知这些解剖特点,仅凭临床经验,术中很难准确选择股骨柄的类型,进而可能造成术后肢体长度和偏心距明显偏差,给病人带来关节功能不良、满意度下降等后果,因为这一点,在研究设计方面,术前规划信息对术者没有采用盲法。
在测量的时效性方面,AIHIP软件系统创新性采用点云渲染技术来实现骨盆和股骨的表面成像[18],使得髂前上棘、耻骨联合、股骨小转子等关键解剖位点的识别精度有效提高,软件还采用深度学习卷积神经网络的智能分割技术,这些创新技术使其在提高测量精度的同时也大大提高了工作效率,吴东等[8]的研究中计算了AIHIP软件规划平均耗时仅约5 min。Huo 等[12]的前瞻性对比研究中也指出,AIHIP软件规划的耗时为(3.91±0.64)min。
二、单纯术前智能影像规划方案很难精准付诸于术中操作实施
精准的术前计划与术中良好的假体安放相结合才能得到满意的影像学结果。AIHIP三维规划软件系统提供髋臼杯假体模拟安放和股骨颈的模拟截骨,髋臼侧的规划可以更加直观地呈现髋臼杯与病人髋臼结构的匹配关系,特别是与髋臼前后壁的匹配关系,是在二维模板规划中无法实现的。股骨侧规划时股骨颈截骨位置的预测决定了术中生物型股骨柄假体良好压配的位置。本研究中对髋臼杯外展角度和股骨颈截骨位置进行测量,并对术前规划值和术后实际值进行比较分析,结果提示两组的实际值与规划值都存在显著差异,说明术者对于髋臼杯的打入方向、股骨颈截骨位置的确认没有更为精确的导向工具,仍然存在经验性操作,从而产生与术前规划的偏差。
Buller等[19]曾尝试利用术前3D打印个性化导板(Patient-Specific Instrumentation, PSI),术中引导髋臼窝的磨挫方向和控制臼杯假体的植入方向。Schneider 等[20]的研究则是术中采用3D 打印股骨颈截骨导板进行精确截骨,研究阐述这有利于匹配恰当的股骨柄假体型号、有效控制肢体长度,而且更适用于直接上方入路等微创手术入路。吴东等[21]利用AIHIP 软件,配合Mimics 等软件同时设计了髋臼磨锉和臼杯植入3D打印导向工具和股骨颈截骨导板,尝试计算机辅助三维设计与3D打印技术相结合,通过临床验证和术后影像测量,假体型号、大小、位置、角度等参数与术前计划一致。随着近年来机器人/机械臂辅助人工关节置换手术的兴起,三维术前规划联合术中机器人机械臂的精确导向可能是提高假体植入精度的更好手段,需要进一步的研究来探讨。
综上,人工智能技术辅助三维规划方法对THA手术假体型号的预判以及对手术后患侧肢体偏心距和肢体长度的重建更加精准。手术病人个体化的股骨颈干角度、股骨颈长度,应当通过术前模板测量来选择接近解剖颈干角的股骨柄假体,更好地实现肢体长度和偏心距的重建。单纯的三维术前规划并未对术中髋臼杯的安放角度、深度以及股骨柄压配的位置作精准导向和控制。未来,三维术前规划结合术中3D 打印导向工具或者加入机器人机械臂的精准执行力,将是进一步研究的方向。
本研究存在一定的局限性:①术后测量仍然基于二维X 线影像,不能规避因为摄片投照角度的偏差带来的测量误差,无法对术后髋臼杯前倾角度进行准确测量和评价;②研究没有设计双盲对照,术者获得两种术前规划测量的关键信息后进行手术,虽然在一定程度上提高了手术的准确性和效率,但是术者难免受规划信息,特别是假体型号的心理暗示作用,可能对研究结果造成影响;③研究中入组的手术病例只有少数是复杂初次THA,如髋关节髋臼侧或者股骨侧结构破坏相对严重的病例,在以后的研究中更多的复杂手术应当被纳入,用以进一步测试人工智能辅助三维规划系统的准确性。
