货运机车自动驾驶系统贯通试验控制研究及应用
2022-06-08杜海宾任育琦王晴川
杜海宾,王 瑞,姜 正,任育琦,王晴川
(中国中车股份有限公司 中车大连机车研究所有限公司,大连 116000)
随着铁路改革的不断深化和铁路货运规模的不断发展,机务运维管理的智能化、信息化、规范化工作在相关应用领域取得了一定效果[1-2]。智能化技术作为新一轮科技革命的重要引领,正快速推动轨道交通行业进步,机车自动驾驶技术作为智能化技术的典型应用已成为势不可挡的潮流[3-4],给行业带来了显著变革。
我国铁路运输具有线路繁忙、客货混跑和信号多变等特点,而西康(西安—安康)铁路穿越秦岭地区,线路绝大多数为3‰~9‰的起伏坡道和最大16‰的长大坡道,列车运行环境更为复杂,确保列车运行过程中空气制动系统可靠、稳定地投入使用是保证列车运行安全的关键[5-7]。货运机车自动驾驶系统贯通试验控制依据西康铁路货运运行要求,结合自动驾驶系统组成与功能特点,在充分考虑空气制动适用条件基础上,提供了对列车空气制动系统功能完整性的检测控制方法,对自动驾驶系统控制下的列车安全行驶具有重大意义和应用参考价值。
1 机车自动驾驶系统构成及空气制动控制
机车自动驾驶系统是依据机车车辆特性、运行线路数据、机车信号状态、列车编组和运行揭示等信息,综合列车运行时间和限速要求,实时规划最优列车运行速度及牵引制动状态,并根据列车运行状态自动操控列车的牵引/制动/惰行工况,使列车处于最佳运行状态,实现列车安全、正点、平稳、减负、节能的运行要求。
1.1 系统构成
货运机车自动驾驶系统由优化控制器、列车控制管理系统(TCMS,Train Control and Management System)接口模块、机车制动控制单元(BCU,Brake Control Unit)接口模块、DMI(Display Manager Interface)人机交互单元、列车运行监控记录装置(LKJ)安全信息平台、数据记录传输装置构成,如图1 所示。
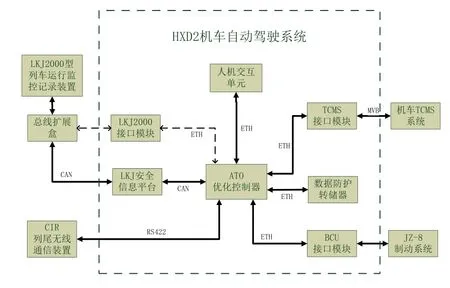
图1 货运机车自动驾驶系统构成
货运机车自动驾驶系统综合获取的机车各种数据信息,运用实时感知信号变化的在线优化运算技术、辅助驾驶速度追踪控制技术、机车自动起停车控制技术、机车空气制动施加控制技术等实现机车自动驾驶系统实时动态行程规划、自动起/停车控制、牵引/动力制动控制、过分相控制、贯通试验控制、空气制动控制、人机交互等功能。
1.2 空气制动控制
货运机车在原有BCU 中新增BCU 接口模块,自动驾驶系统优化控制器通过以太网方式与BCU 接口模块进行连接,并通过该接口模块间接获取机车JZ-8 型空气制动系统数据信息。当机车处于自动驾驶控制模式时,可通过BCU 接口模块实现JZ-8 型空气制动系统的制动施加和缓解控制操作。
货运机车自动驾驶系统空气制动控制时序,如图2 所示。

图2 自动驾驶系统空气制动控制时序
2 自动贯通试验控制功能分析
货运机车自动驾驶系统贯通试验旨在检测、验证和确认自动驾驶模式下[8]列车空气制动系统的完整性和功能性情况,即通过自动施加固定空气制动的减压量与缓解操作,检验列车制动主管风压变化和列车制动空气贯通状态,从而确认列车空气制动系统是否能够正常投入使用,以及投入使用后的制动效用。一旦发现任何空气制动运用问题,便提示司机及时检查处理和汇报记录,并提前通过机车动力制动(电制动)实施列车控速、降速,保证在复杂运行条件下列车行进的安全稳定,是自动驾驶系统控制下列车安全运行的有效防护措施。
2.1 功能需求分析
通过调研,结合空气制动运用规则要求和司机操控习惯,货运机车自动驾驶系统贯通试验控制需要具有的功能主要包括以下3 个部分。
(1)当满足一定条件时,具备在列车开始运行升速时进行贯通试验规划并按照规划控制贯通执行的功能。表现为:当机车处于停车状态时,自动驾驶系统能够依据列车运行前方线路坡度(上/下坡、坡度值)与线路限速、机车信号状态(绿灯、黄灯、红黄灯等)、机车运行状态(运行工况、速度)、机车载重等信息,判定起车速度规划曲线中是否规划贯通试验,以及是否控制机车在相应位置执行贯通试验操作。
(2)当满足一定条件时,具备在列车运行途中进行贯通试验规划并按照规划控制贯通执行的功能。表现为:当机车处于运行过程中,自动驾驶系统能够依据列车运行前方线路坡度(上/下坡、坡度值)与线路限速、机车信号状态(绿灯、黄灯、红黄灯等)、机车运行状态(运行工况、速度)、机车载重等信息,判定前方速度规划曲线中是否规划贯通试验,以及是否控制机车在相应位置执行贯通试验操作。
(3)当机车处于自动驾驶模式时,司机可随时通过DMI 人机交互单元进行临时贯通试验功能。表现为:当机车在自动驾驶系统控制下运行,司机可依据列车实际运行环境情况、线路情况、信号状态、机车状态和机车载重等决定是否实施临时贯通试验。
2.2 功能实施原则分析
货运机车自动驾驶系统自动控制机车实施以上自动贯通试验功能需要遵循的原则主要包括:
(1)机车运行至贯通试验起始点时应满足最低速度要求,依据线路、限速情况不同,不同贯通起始点机车的最低速度限定值不同,但最低速度必须≥50 km/h。
(2)实施贯通试验前应将机车牵引制动级位置零位。
(3)实施贯通试验时的空气制动减压量必须≤50 kPa。
(4)当确认空气制动主管排风结束且列车速度降低≥5 km/h 后,方可执行缓解操作。
(5)整个贯通试验过程应时刻监测列车管压力变化及列车充排风时间,如有异常时自动驾驶系统应立刻交出机车控制权并按导向安全侧原则处理。
(6)当列车具有列尾装置时,应主动使用列尾装置查询列车尾部制动管风压情况。
3 自动贯通试验控制设计
3.1 贯通控制方法
依据铁路规章规则与机务运用要求[9],以及自动驾驶系统实施贯通试验的需求与实施原则,以保障自动驾驶模式下列车的安全、稳定、平稳运行为基本出发点,自动贯通试验控制方法可分为起车贯通试验、运行中贯通试验和特殊贯通试验3 种。
3.1.1 起车贯通试验
机车处于停车状态,包括始发站停车、机外停车、中间站停车和区间停车,当同时满足以下条件时,自动驾驶系统将在行程速度规划曲线中规划贯通试验,即规划起车贯通试验:
(1)机车非单机运行。
(2)自动驾驶系统处于正常工作状态。
(3)机车起车运行的前方线路为连续下坡或长大下坡。
(4)机车起车运行的前方线路限速必须≥50 km/h。
(5)机车运行前方信号机不是黄灯、红黄灯和红灯。
起车贯通试验示意图,如图3 所示。
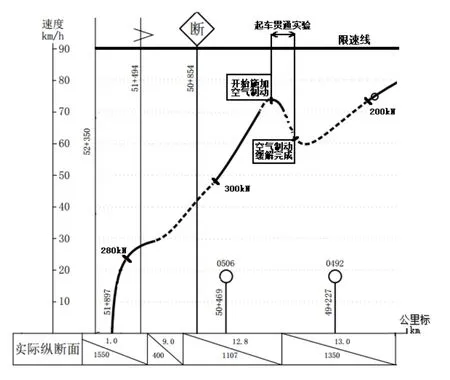
图3 起车贯通试验示意
机车起车运行后,根据贯通试验规划曲线起始点机车运行控制模式的不同,自动驾驶系统将进行不同的响应控制处理:
(1)机车处于人工驾驶模式,当机车运行至贯通试验起始点前200 m 时,自动驾驶系统仅通过人机交互单元以语音和文字方式进行贯通试验提示。
(2)机车处于自动驾驶模式,当机车运行至贯通试验起始点前200 m 时,自动驾驶系统通过人机交互单元以语音和文字方式进行贯通试验提示,并实时显示距离贯通试验起始点距离;当到达贯通试验点时,实时控制机车进行贯通试验操作;贯通试验完成后以语音和文字方式进行贯通试验结果提示。
3.1.2 运行中贯通试验
机车处于运行过程中,当同时满足以下条件时,自动驾驶系统将在行程速度规划曲线中规划贯通试验,即规划运行中贯通试验:
(1)机车非单机运行。
(2)自动驾驶系统处于正常工作状态。
(3)机车运行线路将由平坡或上坡转入连续下坡或长大下坡。
(4)机车起车运行的前方线路限速必须≥50 km/h。
(5)机车运行前方信号机不是黄灯、红黄灯和红灯。
运行中贯通试验示意图,如图4 所示。

图4 运行中贯通试验示意
根据贯通试验规划曲线起始点机车运行控制模式的不同,自动驾驶系统将进行同起车贯通试验相同的响应控制处理。
3.1.3 临时贯通试验
当机车在自动驾驶系统控制下自动运行,司机作为值守人员辅助监视列车实时运行情况。当符合以下任一条件时,司机可通过操作DMI 人机交互显示单元主动触发贯通试验,即临时贯通试验:
(1)临时规定的固定线路位置贯通试验。
(2)接到临时调度命令或其他突发情况原因,可能要在长大上坡或长大下坡区段停车。
(3)空气制动系统出现异常。
(4)司机认可的其他情况。
一旦触发临时贯通试验,自动驾驶系统将立即控制机车进行贯通试验操作,并重新规划行程速度曲线,贯通试验完成后以语音和文字方式提示贯通试验结果。
3.2 关键控制技术
货运机车自动驾驶系统贯通试验控制以列车牵引计算控制为基础,主要研究机车安全操纵优化控制机理,构建列车运行学模型,从而实现满足货运机车自动驾驶模式下主动进行空气制动系统检验、验证的安全防护控制方法。
(1)拟合列车运动微分方程。列车受力过程虽然是一个典型的非线性、有约束、多目标的复杂时变过程,但是依据牛顿第二运动定律可知:列车运动可以看作是一个单质点物体在做受力运动,因而结合运动过程的微分形式可得出

公式(1)变换得

其中,C 为列车所受合力;v为列车速度;m为列车质量;t为列车运行时间。
将列车所受的包括牵引力、制动力(机车制动力和空气制动力)、基本阻力、附加阻力等用二项式化简拟合后代入公式(2)得

其中,a、b、c、k均为常数;s为列车移动距离。
由于方程式(3)为非常规微分方程,因此采用迭代法即可获取拟合后的列车运行微分方程解

其中,n=0,1,2,···,m;m为划分时间点总数;vn为当前时间点列车运行速度,xn为当前时间点列车运行线路坡度值。
(2)机车优化控制计算。由于涉及空气制动的列车控制具有复杂性、突发性的特点,自动驾驶系统控制将依据拟合的列车运动学微分方程不断推导迭代计算,从而获得符合贯通试验控制要求的列车运行速度,如图5 所示。

图5 贯通试验控制计算流程示意
4 现场应用分析
截止2020 年底,采用该种自动驾驶系统贯通试验控制的货运机车自动驾驶实际运用测试里程已超过4 万km。整个运用测试过程中,由自动驾驶系统控制机车担当完成的西康铁路运输任务共136 次。其中,上行(安康东站至新丰镇站)平均运输载重约为1 236 t,下行(新丰镇站至安康东站)平均运输载重约为3 997 t。
通过对货运机车自动驾驶系统起车贯通试验,如图6 所示。运行中贯通试验、临时贯通试验在内的贯通试验控制方法应用数据及运用反馈收集、分析,可以得出:机车自动驾驶系统贯通试验控制能够有效监测、检验、验证列车空气制动系统的完整性和功能特性,满足了控制设计及现场运用要求。
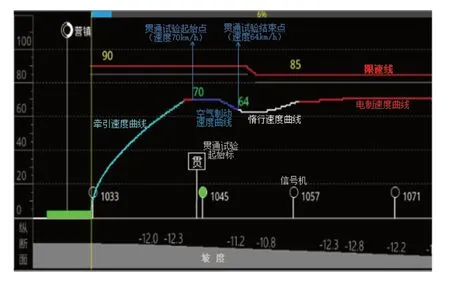
图6 自动起车贯通试验应用示意
5 结束语
铁路机车自动驾驶技术的研究探索与运用推广不仅能够提高铁路机务在机车运用方面的智能化、信息化水平,且对提升铁路运输效率与运用安全起到了一定推动作用。货运机车自动驾驶系统贯通试验控制基于现场运用需求,结合空气制动运用规则要求和司机操控习惯,提供了对列车空气制动系统功能完整性的检测控制方法,满足了机车在西康铁路运用的特殊操作规则要求,同时为自动驾驶控制模式下的列车安全运行提供了重要的防护保障。
