基于云计算的电力设备智能监测系统*
2022-06-06钟建栩余少锋廖崇阳马一宁
钟建栩, 余少锋, 廖崇阳, 马一宁
(南方电网调峰调频发电有限公司 信息通信分公司,广东 广州 510000)
1 引言
电力监测系统[1-3]是一种集视觉、红外和声音传感器于一体,可以对电力设备的热缺陷、断电状态和异常现象进行监测的系统.随着科技的发展,近年来许多学者对智能电力监测系统进行了研究;如,喻洋等[4]将智能巡检机器人技术与新能源场站相结合,设计实现了一套针对光伏电站的电力巡检机器人;康林贤等[5]对智能变电站辅助综合监控系统的原理和结构进行研究,提出了一种改进的基于平均背景的帧间差分方法,实现智能变电站辅助综合监控.在某些电力设施中,一般有多个智能体(无人机、巡检机器人及其他信息采集单元)在监测系统中工作,对于智能体捕捉的图像或视频,大部分检验工作由工作人员在监控中心进行,执行任务能力严重受限.基于此,本文提出了一种基于云计算[6]的电力设备智能监测系统,准确识别智能体获得的目标监控图像,根据建立的目标特征库缩小捕获图像的搜索范围,并输入到视觉注意网络进行检测.
2 基于云计算的电力设备智能监测系统
2.1 系统方案
图1为融合云计算技术的监测系统架构.按功能划分,该架构可分为底层和云端两部分;底层主要由传感器、电机驱动器和通信模块等物理设备构成的分布式巡检智能体;云端包括三种云服务模式:基础设施即服务(IaaS)、平台即服务(PaaS)和软件即服务(SaaS).按层级划分,系统分为物理层、控制层、信息共享层、API接口及应用层;其中物理层属于底层,由众多物理设备或基础设施构成;控制层、信息共享层、API接口及应用层属于云端,主要完成信息通信、共享、计算及展示等.
系统中分配给某个分布式巡检智能体的虚拟机(VM)对应于服务模式IaaS.该系统还为相关智能体二次应用开发提供了平台,即为PaaS类.应用软件将通过SaaS模式共享给不同的用户.在云端,VM是动态分配的,一旦智能体连接到云中,就会根据存储服务器中存储的相关数据创建相应的VM,这些数据主要包括系统配置数据、算法和历史数据等.用户可以通过应用层的用户界面与系统进行交互.当一个任务包含大量的计算部分时,智能体VMs会请求并行计算集群中的计算节点协调完成任务.

图1 监测系统架构
2.2 系统工作过程
系统在工作过程中,分布式智能体或信息采集单元监测的对象会随着任务要求的变化而变化,如仪表监控时主要采集表盘信息,电力线巡检时主要采集电力线信息,为此通过自适应学习模块建立目标特征库,同时将监测任务的对象特征及相关识别算法都存储在云中.当智能体或信息采集单元将图像发送到云端,根据云端命令采用基于视觉注意的目标检测算法进行目标检测,从而提高图像匹配的效率.此外,系统利用多核、PC集群和GPUs计算等并行计算技术,将云端的数据按需共享给多个分布式智能体.
3 多尺度视觉注意网络检测
3.1 目标特征库
特征库存储了目标显著性的统计信息,其中包含了目标的感兴趣区域(Region of Interest,ROI),该信息描述了特征在ROI显著性图中的重要性,检测算法中表示相应特征映射的权重.在监测过程中,通过激发显著特征(大权重)和抑制其他显著特征(小权重),从而提高监测精度与识别准确率.考虑到室外工作的多个智能体采集的图像中同一物体无法保持相同的方向,因此在特征库中没有考虑方向特征.
3.2 多尺度特征提取
一般情况下,较低的网络层有较小的感受野,能够更好地匹配小物体(如仪表盘、电力线和指示灯等);相反,具有高级语义信息的更高层适合于大型对象的匹配(电力塔和光伏发电板等),因此可从原始图像中提取多尺度特征图,充分利用各个层次的特征进行目标检测.
采用下采样操作逐步降低特征图的分辨率并扩大感受野.在每两个卷积层之后,对特征图进行下采样.网络共包含4个级别的下采样,因此特征金字塔包含原图16倍信息.此外,为了得到输入图像的原始尺寸,对特征映射进行逐步上采样,并自动学习上采样参数.为了融合不同尺度的特征并保留高频信息,本文将子采样前得到的特征映射叠加到上采样后得到的特征映射上.每个向上采样级别的叠加特征图具有相同的分辨率.需注意,网络中不使用最大池化或平均池化操作,而是使用单步卷积滤波操作来降低特征映射的分辨率,从而避免了梯度离散问题.
3.3 视觉注意网络
3.3.1 网络结构
图2所示为提出的视觉注意网络结构.该网络模型以不同尺度的特征图作为输入,采用五个连续卷积层进行特征提取,然后用一个卷积层将特征映射数减少为一个,最后网络层为一个全连接层,从而实现分类(回归),该网络能够根据目标库突出待监测物体的显著特征,减少非显著特征或背景的干扰.
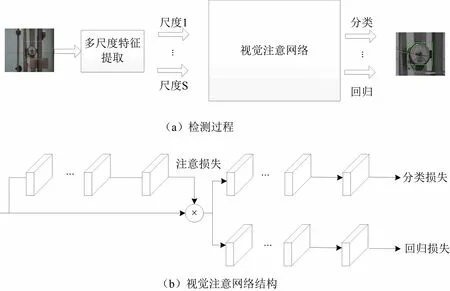
图2 视觉注意网络结构
3.3.2 损失函数
视觉注意网络有两个分支:分类和回归.分类子网络用于预测每个像素的概率值;回归子网估计对象边界框的左上角和右下角坐标.网络工作时同时预测多个锚点,且这些锚点位于每个像素的中心,并与尺度和纵横比相关.此外,训练时采集大多数目标物体的尺度在35到350像素之间,如果小于30像素,则不将其用作训练样本.
网络在5122到322之间设置了5个锚,尺度步长设置为0.5.此外,锚的纵横比设置为1∶1、1∶2和2∶1.因此,在每个像素处有A=15个锚.对于尺寸为W×H的特征图,共有W×H×A个锚.IOU(Intersection Over Union)定义为两个区域相交像素的百分比.为有效计算损失,具有最高IOU的锚为正样本;与之相反,如果锚和所有边界框之间的最高IOU小于0.3,则将其指定为负样本.
为多尺度视觉注意网络设计了一个损失函数

4 系统测试与分析
4.1 测试环境
仿真测试于某变电站内进行,选取无人机图像采集和微处理器处理方式将图像发送到云端并接收云端的命令.
4.2 结果及分析
首先,将训练集、验证集和测试集中的每幅图像分割成16幅不重叠的375×375图像,作为网络的输入.网络训练时部分参数如表1所示.

表1 网络训练参数
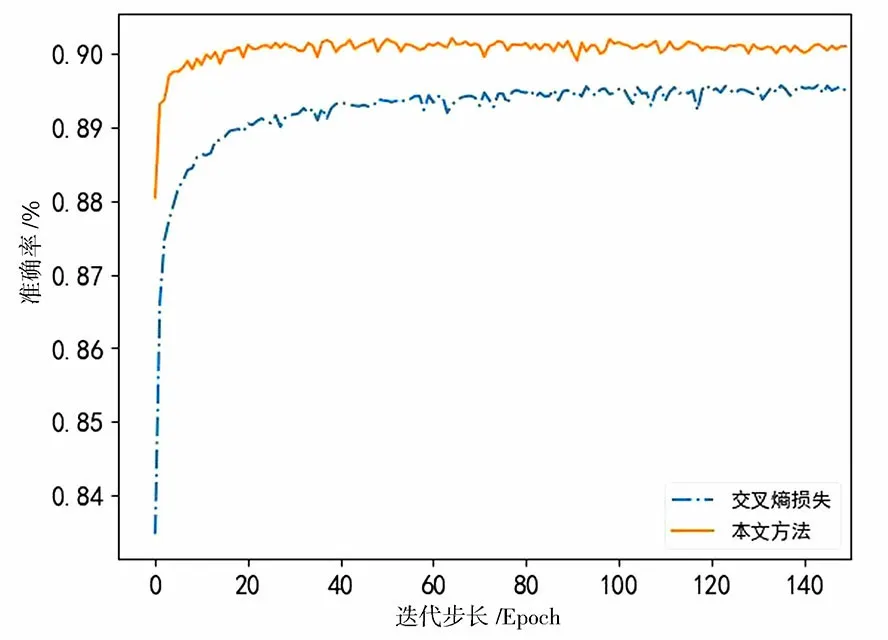
图3 不同损失函数仿真对比结果Fig.3 Comparison of simulation results of different loss functions
图3所示为所提模型的性能曲线,该模型使用本文所提的视觉注意损失函数和交叉熵损失函数进行训练,并在训练阶段进行迭代.可以看出,使用本文所提损失函数训练的模型在35次迭代时可获得最佳性能,而使用交叉熵损失函数训练的模型在78次迭代时可获得最佳性能.由此可见,本文所提损失函数使得训练收敛速度更快,且模型性能更优.
表2所示为所提方法与BOW[8]、COPD[9]及RICNN[10]方法的运行时间和准确率对比结果.可以看出,本文所提方法性能有明显提升,准确率达到90.1%,较传统BOW方法提高30%左右.图4所示为利用本文方法的检测结果.可以看出,本文方法能够将匹配的搜索区域缩小到最显著区域(Most Significant Region,MSR)区域,进一步验证了所提方法的有效性.
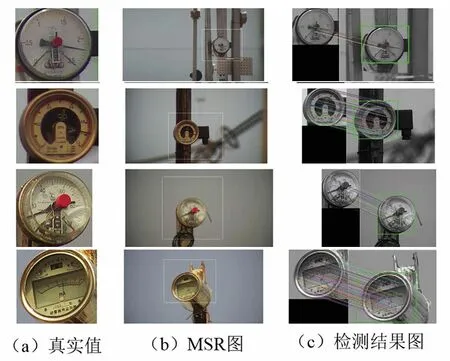
图4 仿真结果Fig.4 Simulation results
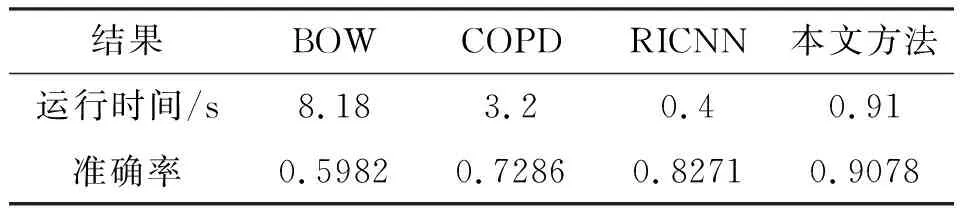
表2 不同算法结果
5 结语
构建了基于云计算技术的电力设备智能监测系统,并对系统框架、运行模式和工作过程进行了设计.系统运行时未考虑网络攻击和通信安全等风险.未来可研究区块链和通信加密等提高系统安全性,降低信息泄露风险.
