一种远程遥控灵活多动式水面悬浮垃圾收集处理装置分析
2022-06-06叶澍荣曹卓邓展王连城韩承刚
叶澍荣 曹卓 邓展 王连城 韩承刚










摘 要:水是生命之源,然而水污染现象愈发严重。水面上的塑料、泡沫和生活废弃物等悬浮垃圾更容易被生物所寄居,助长了物种入侵隐患。针对这一问题,本研究主要设计了一种远程遥控多动式水面悬浮垃圾收集处理装置,该装置由发电模块、动力模块、浮沉自动调节模块、遥控模块构成,通过改变气囊大小调节装置浮沉,利用装置内外水压使垃圾随水一起进入装置,水泵排水提供动力,通过无线遥控灵活地控制垃圾收集装置的位置,通过一系列逻辑门控制自动化浮沉,使该装置平稳有效地完成工作。整个装置的关键技术包括浮沉自动调节设计、遥控装置设计、提供动力的机械设计等,无污染,节约能源,具有很强的绿色环保特点。
关键词:机械设计;垃圾回收;环境保护
中图分类号:TP242;R122 文献标识码:A 文章编号:1674-1064(2022)03--03
DOI:10.12310/j.issn.1674-1064.2022.03.041
水是生命的源泉,是人类赖以生存的基本物质基础。党的十八大以来,为实现经济的可持续发展,我国积极推进生态文明建设和生态环境保护工作。2018年和2019年,中央分别拨款180亿元和200亿元专项资金,用于加快推进水污染防治工作,纾解了水污染防治工作压力[1]。但目前,部分区域水环境塑料污染状况仍极为严峻,已经严重威胁到了水生生物的生存和人类的健康[2]。因此,捕捞水中的垃圾,是目前城市生态环境建设中迫在眉睫的课题。
本研究研制的基于水面垃圾处理的水面垃圾收集裝置,主要通过机械手段,有效利用电源,实现垃圾的收集。其最大特点是能够提高效率。该装置的设计针对水面垃圾收集处理,解决了现代社会的水生态污染的问题,具有快捷、方便、高效等特点。通过控制该装置收集水面垃圾,避免了人工打捞存在的不安全因素,提高了工作效率,更符合社会发展、美化城市的需求。
1 项目内容
1.1 设计方案
1.太阳能板;2.伸缩杆;3.气囊;4.细杆(上有水位感知器);5.内部装有气泵;6.电源插口及螺旋桨遥控装置;7.带有阀门的排水口
该装置由发电模块、动力模块、浮沉自动调节模块、遥控模块构成,利用太阳能驱动,能够沿着水岸进行水面垃圾清理。水面垃圾收集装置示意图如图1所示。
1.2 发电模块
该装置采用太阳能和锂电池混合供电系统,根据发电量和储电量自动选择供电方式,不工作时通过太阳能向锂电池充电,实现能量的储存。太阳能驱动两个泵、遥控装置、水位控制器等,多余的电能储存到该装置内部密封夹层里的储电装置中。
在特殊情况下,如果长时间没有太阳提供能源,该装置底部有可以充电的插口。
太阳能板为圆形,位于水面垃圾收集装置正上方,高出边缘10 cm,便于水面垃圾的收集。太阳能板由中央的杆支撑,杆与该装置的底端相连,可以伸缩,便于倾倒该装置内的垃圾。垃圾处理装置设计如图2所示。
1.3 动力模块
该装置以喷水或者排气作为动力,收集水上漂浮物时,水与漂浮物进入该装置中,水从筛网漏出进入该装置夹层上方孔洞内。水被孔洞内连接的水泵加速压出,从该装置的四个缺口喷出,通过控制水喷出的方向进而控制该装置的移动方向。
当该装置中的水排尽时,水泵开始排气。由于该装置孔洞上有铁网,空气透过纱网进入到夹层上的孔洞中,被水泵排出。因为收集的垃圾会被纱网过滤,纱网与孔洞之间留有空隙,不必担心孔洞被垃圾堵住。而水泵排气时会使其温度升高,考虑到水泵在水下工作,工作温度较低,所以不会产生太大影响。
为避免出现水泵损坏,导致装置无法正常回收现象,产品底部设计了螺旋桨结构,如图3所示,与遥控装置部分线路相结合,切换按钮实现不同的动力回收。
1.4 沉浮自动调节模块
收集垃圾时,该装置重量会变化。为了保证装置作业时平稳,安装浮沉自动调节装置。
水位控制器有三个档位,如图4所示,分别为正常水位B、高水位C、超高水位D。高水位C与超高水位D感知器位于细杆上,正常水位B感知器位于气囊边。
浮沉控制流程图如图5所示。正常水位时,垃圾收集装置正常保持在略高于水面的位置,控制器会停止气泵工作。收集垃圾时,控制器会允许气泵抽气到高水位,到达高水位会停止气泵工作。下降到超低水位时,垃圾收集器就有沉入水底的危险,控制器会启动气泵,开始充气直到上升到正常水位。
为了便于实现浮沉功能,用三个开关模拟b、d端的状态(1、0)模拟装置在水面高度,正电极接+5 V电源,每个负电极分别通过4.7的电阻(R1,R2)接地。将单片机的P1.0端口接开关1,P1.1端口接开关2。假设被水淹没的负电极都为高电平,开关此时置为1;露在水面的负电极都为低电平,开关此时置0。单片机通过负电极重复采集检测装置水位,当位于低水位时(此时两个开关均置0),气泵必须抽气使气囊缩小,降低水位;当装置处于正常水位时,检测信号为高,低电平(此时开关1置1,开关2置0);当水位过高时,检测信号为高电平(此时开关1和2都置1),单片机检测到P1.0和P1.1为高电平后,气泵立即充气。
浮沉信号与控制操作关系如表1所示。
为便于收集垃圾,用一个开关模拟P1.2状态(开关3此时不工作)。在装置处于正常水位前提下开关工作,P1.2收到遥控信号时(开关1此时置1),气泵开始抽气,然后单片机重复采集检测装置水位,自动调节装置水位。
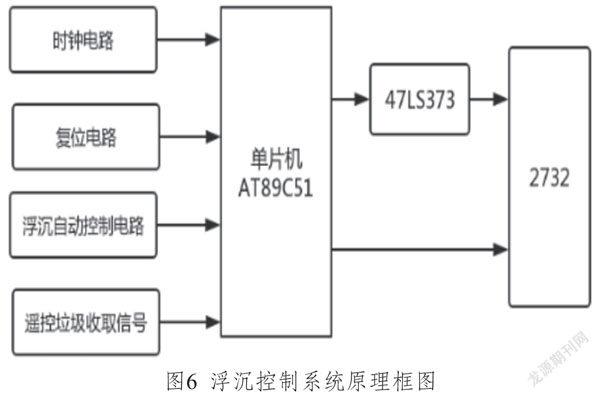
为避免系统发生故障,装置失去浮沉控制造成严重后果,在超高水位时单片机P1.7端口为气泵充气命令输出端口,P1.7=0为低电平,经过阀门后与气泵的另一端接地导通,启动电机工作;P1.7=1为高电平。反之,气泵停止工作。电路故障报警由单片机控制,电机故障报警信号由P1.0和P1.1输入。
浮沉控制系统原理框图如图6所示。
1.5 遥控模块
为实现该装置收集垃圾的灵活性、移动性,安装浮沉手动调节装置。收集水上垃圾时,通过遥控器发出命令,使气囊排出小部分气体,该装置下沉,当装置边缘低于水面,装置内外形成水压差,垃圾随水一起流进该装置内,之后装置会自动调节高度。
发射/接收电路如图7所示。
如图8所示,M2接收遥控器蓝色按钮命令,M2输出气囊下方的气泵。此命令使气泵抽气直到水位到达高水位,此时水面垃圾自动流入。
如图9所示,M1与M3分别接收遥控器的左右摇摆杆的命令,M1与M3输出连接垃圾收集装置底部的四个缺口,控制关闭与打开。
1.6 遥控装置参数
遥控器—发射板工作电压:DC 3 V。
小功率接收主板工作输入电压范围:DC 3.6 V~6.0 V(可以使用任何电源设备)输出电压电流:输出电压=输入电压,三路输出/每单路输出最大持续工作电流1.2 A。
大功率接收主板工作输入电压范围:DC 6 V~15 V(可以使用任何电源设备)输出电压电流:输出电压=输入电压,三路输出/每单路输出最大持续工作电流5 A。
遥控距离50m。
1.7 理论设计计算
浮力计算:气囊和其他物品所能提供最大浮力为1 352 N,而所有装置的重量为475 N。排水量为475N+垃圾的重量。
电力分析:两个抽水水泵每小时消耗260 W,充气水泵每小时消耗120 W以下。太阳能板每小时发电390 W~400 W。接收器、继电器、变压器每小时消耗10 W以下。经过分析,太阳能发电足够自给自足。
单个水面垃圾收集装置质量及经济成本如表2所示。
2 创新点
相比于以往的研究与探索,本项目具有以下几点创新性:
第一,利用该装置内外产生水压进行垃圾打捞。
第二,拥有独立的动力系统,通过水泵下出水口的压力喷水实现装置的移动,进而通过无线遥控控制移动方向。使该装置具有很高的灵活性,提高垃圾收集效率。
第三,拥有沉浮调节系统,通过一系列逻辑门控制实现装置自动化控制浮沉,使该装置平稳有效地完成工作。
第四,拥有自动产能系统,采用太阳能和锂电池混合供电系统,根据发电量和储电量自动选择供电方式,不工作时通过太阳能向锂电池充电,实现能量的储存。
3 结语
目前,水面垃圾处理按动力来源大致可分为人工驾驶和燃油驱动。人工驾驶主要采用半舱式或甲板机动驳船,进行人工水面垃圾捞出,这种作业方式耗时耗力、效率低下,且作业环境存在一定的风险。而依靠燃油驱动的垃圾清洁船价格昂贵且体型庞大,在小型水域无法作业,且产生大量废气和发生漏油的危险,会对大气和水体造成污染。
现有的水面垃圾清洁装置多为船形或凹形,利用传送带进行垃圾的收集处理。而该装置设计为圆筒形,利用装置内外产生的压差进行打捞,不仅可以全方位收集垃圾,而且能够尽可能地增大垃圾收集舱的体积,提高作业效率。
此远程遥控多动式水面悬浮垃圾收集处理装置通过遥控设备进行控制,可以打捞塑料、泡沫等垃圾,一定程度上节约了劳动力,保障了打捞的安全性。此装置采用太阳能供电,通过浮沉调节装置调节高度,配上蓄电池,可以全天工作,解决了能源浪费的问题。
参考文献
[1] 叶忠明,杨晨露,张子墨.基于AHP应用的水污染防治资金项目绩效评价研究——以河南省為例[J].会计之友,2021(24):49-56.
[2] 田满军.水环境智能清洁机器人的视觉算法研究[D].北京:中央民族大学,2021.
基金项目:2021年大学生创新创业训练计划“远程遥控灵活多动式水面悬浮垃圾收集处理装置”(202110188025)
