基于数字图像处理的掘进机导向算法研究
2022-06-02赵宗华
赵宗华
(中国铁建重工集团股份有限公司 湖南长沙 410100)
1 引言
随着现代技术的发展,数字图像处理技术在工业测量行业中应用广泛,而在工程领域中也开始兴起,基于图像的识别定位技术具有很好的应用潜力和广泛的应用场景,在此之前,一批优秀学者也研究了图像识别在隧道工程中的应用,何国华等[1]做了基于数字图像的隧道表观病害识别方法研究,他们系统分析隧道裂缝和渗漏水病害的图像特征,采用CTA测度及其改进算法可较好地实现表观病害识别。路刚[2]提出了一种钢管顶进施工滚动角与纠偏技术研究,光斑图像的阈值分割和光斑中心坐标的计算方法,针对光斑图像的特点,背景与目标色相差很大,并且光斑在一副图像中的面积很小,用极大极小法准则,实现精确提取光斑的坐标。程金芝等[3]提出了一种相位标志牌图像识别与缺陷检测方法,采用导向滤波、灰度化方法等对图像处理算法,精确检测出电力设施相位标志牌是否缺失。冷波等[4]采用严密几何模型,对成像过程进行误差分析与标定,得到较为精确的定位结果。鉴于图像处理技术在工程中的良好应用[5],本文主要研究用于地下施工的竖井、顶管机、管幕机等工程装备基于数字图像识别定位的导向系统算法实现。
顶管机是一种用于市政等施工的非开挖掘进式管道铺设施工装备,由刀盘、推进系统、控制系统、出渣系统等组成[6]。顶管机采用顶进的方式往前掘进,有矩形顶管机、圆形顶管机、异型顶管机等多种机型,相比盾构机而言,顶管机开挖区间比较短,且主要是直线施工,主要是用于车站建设或者管道铺设,使土层不易受到扰动,对上方有重要建筑物、构筑物的工地来说,该施工方法更加安全[7]。本文研究的图像视觉导向系统,可以自动识别图像上不同颜色的光斑,数字化显示光斑坐标,得到盾体的中心偏差。
2 系统设计
针对隧道施工中掘进设备位姿的测量需求,设计了图像视觉导向系统。图像视觉导向系统主要有激光经纬仪、激光指向器、刻度板、摄像头、工控机、触摸屏等部件,此系统已用于竖井、顶管机等地下工程掘进机设备上。
在竖井掘进机或者顶管机始发前,在掘进机中盾中心安装上刻度板,在前盾后端安装激光指向仪,发射绿色激光打在刻度板上,在开挖洞口架设激光经纬仪,发射红色激光打在刻度板上,并调整激光经纬仪与设计线路方位、高度一致,确定激光经纬仪激光线的俯仰角和方位角,记录下来,方便经纬仪移动以后,恢复方位。掘进机始发后,激光经纬仪和激光指向仪发射激光,打在刻度板上,相机自动拍摄图像,其图像数据通过网线传输到工业计算机进行计算。通过透视变化、单通道颜色分割提取等图像处理技术得到绿色光斑和红色光斑的光斑坐标像素值,再通过算法提取刻度板中心坐标,数字化显示光斑坐标,得到掘进机的平面偏差、高程偏差。从而明确掘进机实时掘进姿态。硬件示意图如图1。

图1 硬件示意
3 图像视觉导向系统关键算法
3.1 透视变化
在摄像头拍摄刻度板图像时,由于摄像头与刻度板不是垂直安装的,图像就会产生一定的畸变,如图2是倾斜拍摄,图中越远离镜头,畸变越大,四周的圆环之间的面积比关系也将发生变化,对识别算法有错误判断,需要先对图像进行透视变换。

图2 倾斜拍摄
透视变换是将图像从一个视平面投影到另外一个视平面的过程,所以透视变换也被称为投影映射[8-9]。通用的变换公式为:

式中,u,v为原始图片行列像素;x,y为变换后的图片坐标。
其中x=x′/w′,y=y′/w′。可写成:

根据公式(2),可以知道,得到一副图上的4个点就可以获得透视变化的公式。求得变换公式后,也适用于所有的图片。一般采用4个点进行透视变换,为了方便选择点位,一般采用棋盘法标定图像,因为刻度板自身有格网,可以在刻度板方格线的4个角点,通过添加鼠标事件来获取。在目标图像取4个点以后,就可以计算变换矩阵来实现透视变换,如图3和图4。

图3 图像变换前

图4 图像变换后
3.2 图像光斑分离提取
在一个刻度板上,有红色和绿色光斑存在,我们要分别定位他们的坐标位置,就需要采用方法先把光斑分离。
因为刻度板图像背景比较单一,光斑颜色有红色和绿色两种,我们分别提取彩色图像的RGB通道,转换成多个单通道图像,而红色通道图像就只保留红色光斑,把其余颜色分离开,绿色通道图像只保留有绿色光斑,把分离的图像存放到vector类型的mv中,接着进行引用赋值,其中对于彩色图mv[0]就表示引用取出mv中的蓝色分量,mv[1]就表示引用取出mv中的绿色分量,mv[2]就表示引用取出mv中的红色分量[10]。为了增强对比度,我们设定:
绿色光斑图像:Green=2˙mv[1]-mv[0]-mv[2]
红色光斑图像:Red=2˙mv[2]-mv[0]-mv[1]
就是放大所需要的通道颜色,消除其余颜色。至此,就提取分离出红绿光斑图像。
3.3 重心法求解光斑中心坐标
光斑的形状近似圆形,也有椭圆或者不规则形状,因为激光打在刻度板上,光斑会发生折射和反射,受杂光影响,成像也就不规则。重心法是获取目标的质心,得到质心的坐标,而在提取的光斑图像中,就仅仅存在光斑,其他背景色和干扰均已通过二值化后,变成了黑色[11-12]。所以对图像采取重心法以后,就是光斑中心的坐标。
根据空间矩的特征,一阶矩就表示质心。这个随机变量的属性可以用统计特征—矩(Moments)来描述[13]。
设X和Y是随机变量,c为常数,k为正整数,如果E(|X-c|k)E(|X-c|k)存在,则称E(|X-c|˙k)E(|X-c|k)为X关于点c的k阶矩。
c=0时,称为k阶原点矩;
c=E(x)时,称为k阶中心矩。
如果E(|X-c1|p˙|Y-c2|q)存在,则称其为X,Y关于c点p+q阶矩。
图像的矩,零阶矩:

式中,V(i,j)为提取的光斑图像在(i,j)点上的灰度值。
我们可以发现,当图像为二值图时,M00就是光斑图像上灰度值为1的总和,因此,M00可以用来求二值图像(轮廓,连通域)的面积。
一阶矩:

式中,M10为光斑图像上白色区域x方向坐标的和;M01为光斑图像上白色区域y方向坐标的和。
因此,一阶矩可以用来求红色和绿色二值图像的重心:
3.4 霍夫圆法求刻度板中心坐标
霍夫圆检测的原理是,已知圆可以由任意三点确定,一个圆经过 Hough变换后,也可以得到圆心[14]。如图5,搜索圆上的所有点,每搜到3个点,就确定一个圆,记录下来该圆的圆心,当所有点搜索完以后,比较圆心一样的点数,点数多的确定该圆。即大部分点都应该在这个确定的圆周上,以此确定该圆。
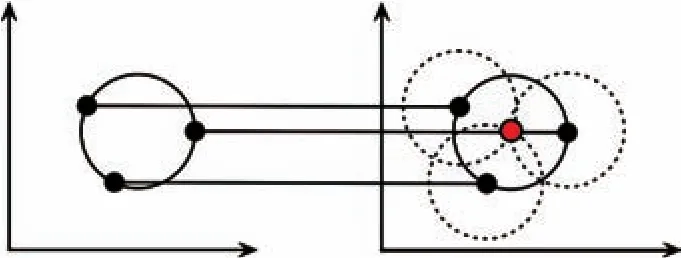
图5 霍夫圆检测原理
我们采用的刻度板上有圆环刻度线,经过灰度化、二值化以后,只保留有圆形,通过识别这些圆形,来找到刻度板的圆心处坐标。
已知图像每一个像素对应的极坐标坐标点为(x,y):

式中a,b为极坐标中的圆心;R为半径;θ为0°~360°。
至此,通过霍夫变换可以得到刻度板的圆心在图像中的坐标。
4 实验结果与分析
4.1 角点拾取的影响
上文得到的光斑坐标和刻度板圆心坐标,是以像素为单位的,而在工程中,要以毫米为单位显示盾体偏差,就要把图像像素大小转化为长度单位。
因为刻度板有格网,实际长度已知,一般为100 mm×100 mm,在透视变化过程中,我们选取了刻度板的格网角点,可以得到100 mm对应的像素数,可以根据像素数量与实际长度的比值,确定一个像素的实际长度。主要误差在角点拾取过程中,由于是人为操作鼠标拾取,会有一定的点击误差。按照多次实验,如表1,选取的角点坐标,均方根误差在4个像素以内,实验中,一个像素代表实际长度为0.12 mm,则人工拾取精度可控制在0.5 mm以内。

表1 拾取角点坐标 像素
4.2 中心坐标提取误差
在霍夫圆检测圆形时,由于刻度板上圆形会有畸变,虽然进行了透视变换,不过拍摄图像的位置不同,畸变大小不同,经过透视变换后的圆环,是以平均畸变量来修正的,所以刻度板上的圆环并不是一个标准的圆形,通过霍夫圆检测的圆心并不是完全的刻度板中心,会有长度误差。
为了防止因刻度板抖动而导致透视变换效果不佳,我们采取两种方法结合识别刻度板中心。我们在刻度板的中心标记一个0.2 mm半径的黑色实心圆,由于背景色和黑色点像素值相差很大,通过二值化,能精确提取中心坐标,通过与霍夫变化得到的圆心比较,如表2两种方法提取刻度板中心的图像对比,表3是两种方法提取的刻度板中心坐标对比,并与人工提供对比。数据表明,提取精度在2个像素左右,这个误差换算到实际距离,误差在0.3 mm以下。

表2 两种方法的图像提取结果

表3 不同方法提取的中心坐标对比 像素
5 结论与讨论
经实验对比分析,本文提出的红绿光斑分离、刻度板中心提取等图像处理方法是可靠的,解决了一副图像内两个光斑的分离,并精确定位光斑坐标,测量精度为2 mm,设计开发的图像视觉导向系统已成功应用在多个工地项目,可满足掘进设备的导向定位工作,为地下掘进装备在施工过程中保证施工精度和安全以及设备纠偏提供了依据。
