一种老人辅助多功能助力器*
2022-06-01徐肖肖周传喜魏珉昊
徐肖肖,熊 念,周传喜,魏珉昊
(长江大学机械工程学院,湖北 荆州 434100)
随着我国快速步入老年化社会,老年人的生活问题日益突出,如老年人的行走和上下楼问题。 目前市面上主流的老年人上楼助力器大致分为车型助力器及外骨骼腿型助力器,腿型助力器主要是电机与智能机器人相结合,而车型助力器主要由电机驱动从而带动人体前行,但其市场价格都较为昂贵。
本文介绍的老人辅助多功能助力器属纯机械腿,制造较为方便,成本较低; 能够折叠,占地空间小; 且能够实现调级改变上下楼梯提供力的大小; 同时,内置有把手以及伸缩装置等,也可以从助力器转换为拐杖,达到一种机器具有多种功能的效果,一定层面提高了机器功能上的多样性。
1 助力器的总体结构
本辅助多功能助力器的机械结构主要由能量转换系统、 调级系统、 缓冲系统、 固定系统,伸缩系统,切换系统这6 个部分组成。
通过抬腿来压缩弹簧,弹簧储能,在放腿的时候弹簧伸长,释放弹力,起到减轻膝盖弯曲的作用。 此外,调级系统根据拉伸手柄以及推杆与卡槽之间的关系来实现。 助力器到拐杖的变形主要通过固定膝关节,即固定装置翻转,通过磁性铁钩与卡槽的配合来完成; 通过伸缩装置使长度拉长来达到拐杖的要求; 缓冲装置增大拐杖底部的表面积,在使用途中更加平稳,减小地面较滑而摔倒的风险。
1.1 驱动装置
参考孙桓[1]主编的《机械原理》,可得凸轮与推杆配合可形成一种高副机构,可实现匀速转动变换为具有停歇往复摆动运动。 基于反转法原理运用,可实现弹簧、 推杆、 凸轮的能量储存释放。 由压缩弹簧提供的弹力作为装置的原动力,驱动双滚轮在凸轮内槽之间滑动,从而起到减轻老人膝盖受力频繁弯曲问题[2]。
1.2 调级装置
调级机构主要是通过变级推杆与排齿之间的配合来改变储能弹簧的压缩量,以此来改变助力器推力的大小来实现助力器调级,具体结构见图1。
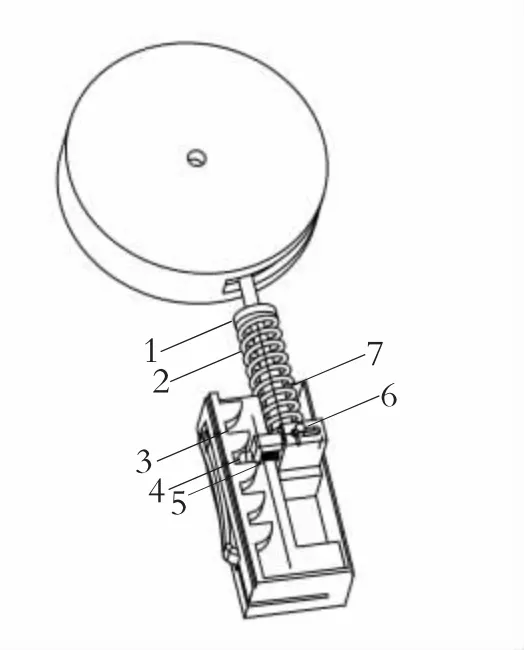
图1 调级装置机构图
初始状态下,储能弹簧处于压缩状态下,由于弹力的作用,变级推杆与排齿接触,此时通过推动手柄,变级推杆前段小球顺着排齿圆形内壁向上运动至下一个卡槽。 因此储能弹簧的长度也被改变,其在后续运动过程中给大腿施加的力也会改变,从而起到调级的作用。
1.3 切换装置
手柄切换装置主要是手柄在旋转90°后,通过下端抵杆抵住手柄下端槽口来起到固定的作用,上部分则通过机架阻止其向上运动[3]。在切换为助力器时可先将抵杆旋转到下方滑槽内,手柄也通过旋转到达变级机构中,并通过滑扣固定。
1.4 固定装置
固定装置主要通过卡环与卡槽之间的连接实现上下端相互固定,具体结构见图2。
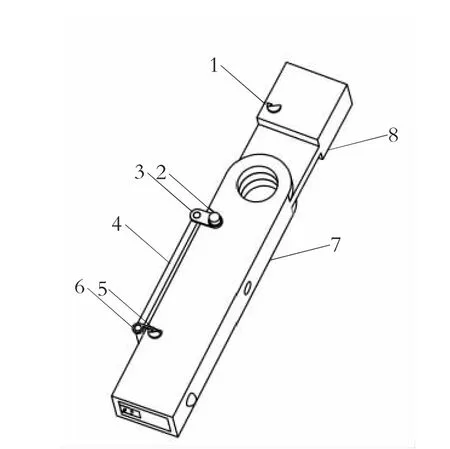
图2 固定装置图
由人体结构可知,大腿与小腿之间旋转角在90°内,通过小腿辅助机构机架的设计,使其只能如图3 所示顺时针旋转。 凸轴与连接扣通过螺纹连接,可以相对转动,在上下两端各放置卡槽,在助力状态下,使卡钩与下端卡槽配合,在拐杖模式下,转动挡板使卡钩与上端卡槽配合,卡环与卡槽之间通过磁石连接。
1.5 伸缩装置
伸缩装置通过推动助力器下端圆槽内圆球,使弹簧压缩。 此时抽出助力腿二级伸长部分,弹簧圆球运动到指定位置便弹出,与下部圆孔卡住,既可以保持稳定,又可以达到日用拐杖的长度要求。
1.6 缓冲装置
缓冲装置主要通过增大拐杖底部表面积以达到防滑的目的,其具体结构见图3。

图3 缓冲装置图
当转换为拐杖模式时,从伸长块内抽出缓冲块,缓冲块与下连杆构成球面副,可任意转动,上连杆通过销与伸长块构成旋转副,可自由旋转。 此外,上连杆以及下连杆只由卡杆自由固定,通过拨动卡杆内的凸起块,可实现缓冲块的固定与旋转。在一定程度上增大拐杖底部与地面的接触面积,从而提高拐杖的稳定性,缓冲块底部设计一些花纹可起到增大摩擦力的作用。
2 结构的设计计算
2.1 尺寸确定
为简化设计思路,现做如下假定。 假定一,老人的大腿长55 cm。 假定二,老人的小腿长35 cm。假定三,老年人所用拐杖的长度为85 cm。 有以上3 个假定,即可通过老人的大小腿长度来确定膝盖销到圆盘的距离,膝盖销到伸缩杆一的距离。 经确定,不会导致机构的长度过长或过短的小腿辅助机构的长度为30 cm,从而确定膝盖销上部机构的长度为50 cm,变成拐杖时手柄到膝盖销的距离为30 cm,二级延长机构的长度为25 cm。
2.2 槽内连杆尺寸的确定
由于手柄的长度为15 cm,宽度为30 cm,所以横杆的长度和手柄的宽度相等,均为30 cm,抵杆与手柄槽相接触时,抵杆与手柄成45°角,人体手掌对手柄的压力约为150 N,假设老年人的手掌对手柄的压力为150 N,对横杆进行受力分析可得横杆所受的压力为110 N,其受力分析见图4。
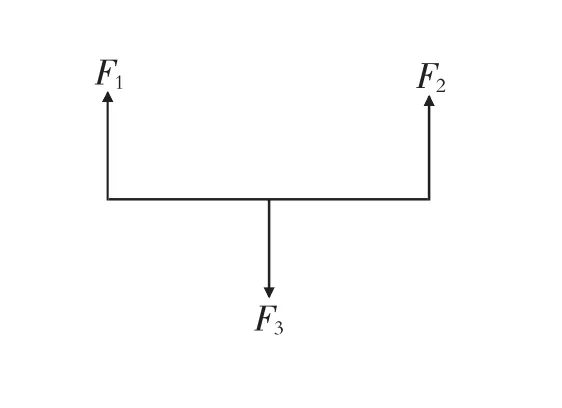
图4 横杆受力分析图
图中F1,F2为结构壁对横杆的反作用力,F3为抵杆对横杆的作用力,N。 横杆自重忽略不计。 由于横杆的长度为30 cm,对左右两边取矩可得两个支座处的支撑反力,得出如下弯矩图 (见第138 页图5)。

图5 弯矩图
最大弯曲应力为

式中: Mmax为横杆所受最大弯矩,N·m; Wz为抗弯截面系数,mm3。
Wz的计算公式为

σca应该满足的条件为

式中: [σ] 为许用应力,MPa,取[σ] =66 MPa,d1为槽内连杆的直径。 由以上分析计算得d1=7 mm。
2.3 关于弹簧丝直径的设计计算
通过比较各种弹簧材料的性能和该设计的工作环境,选择50CrVAⅠ类弹簧较合适。 图6 为弹簧受力图。
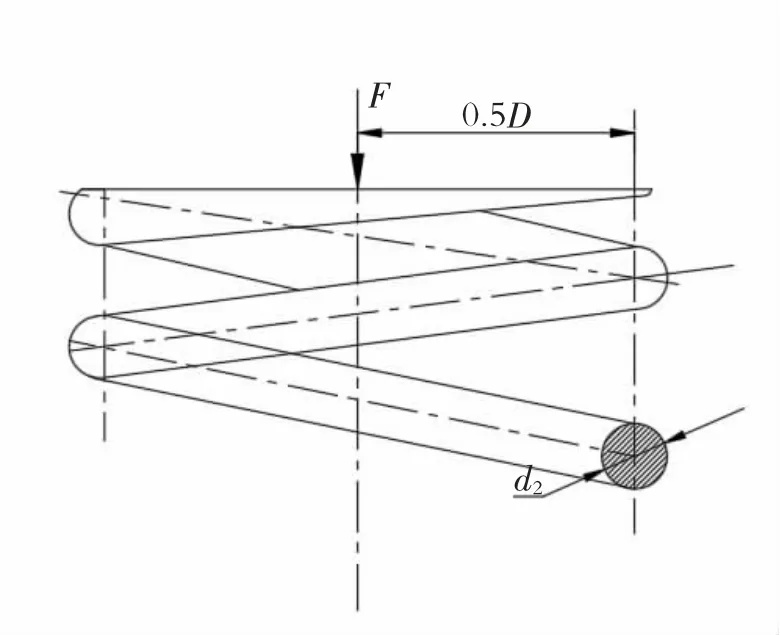
图6 弹簧受力图
曲度系数K 的计算公式为

式中: C 为旋绕比,根据常用旋绕比,取C=6。 根据安装空间的大小,设弹簧的中径为42 mm,根据人体的用力情况,可假设F=200 N 时,弹簧丝内侧的最大应力及强度条件可表示为

式中: F 为弹簧所受的最大应力,N; d2为估算的弹簧丝直径,mm; [τ]为许用切应力,MPa,取 [τ]=450 MPa。
弹簧丝的直径为

经以上计算分析整理得d2≥7 mm。
3 助力和变换流程
通过凸轮上连杆与调级机构上盖子的固连实现凸轮中心与调级机构之间的距离恒定。 滚轮在凸轮槽中的运动改变弹簧的伸缩量,从而实现储能弹簧的储能和释放,以此来提供助力作用[4-5]。
此外,调级系统根据拉伸手柄以及推杆与卡槽之间的关系来实现。 由助力器到拐杖的变形,则通过固定膝关节,即固定装置翻转,通过磁性铁钩与卡槽的配合来完成; 二级伸缩装置的拉伸,使长度拉长来达到拐杖的要求; 缓冲装置增大拐杖底部的表面积,在使用途中更加平稳,减小了老人摔倒的风险。
4 结论
本文针对辅助老人上楼辅助工具的功能与便携性两方面问题,设计了一种辅助老人上楼助力器。助力抬腿部分是本装置的主要创新点,弹簧推杆部分采用直卡尺、 齿进行调级,在无电子设备的前提下提高了老人对于助力器的适应性和通用性。 同时本助力装置采用侧面加装折叠拐杖柄以及小腿部分增加伸缩杆和抓地勾爪等手段,解决了助力器携带不便和功能单一的问题,老人在平路行走时可将上楼助力器变形成拐杖,大大提高了助力器使用的便捷性。 该助力器变换简单,且方便携带具有多种用途,能够极大地提高独居老人日常生活质量。