顾及超像素光谱特征的无人机影像自动模糊聚类分割法
2022-05-31唐晓芳詹总谦丁久婕刘佳辉熊子柔
唐晓芳,詹总谦,丁久婕,刘佳辉,熊子柔
武汉大学测绘学院,湖北 武汉 430079
无人机(unmanned aerial vehicle,UAV)低空遥感已经成为国家自然资源快速调查[1]、应急测绘[2]与灾害监测[3]的重要技术手段。但高空间分辨率特性带来的地物类别繁杂、纹理细节丰富、轮廓边界错综复杂等问题,给自动化影像分割识别带来了巨大挑战[4]。如何实现无人机影像的高精度智能化分割已成为当前的研究热点之一[5]。
理想影像分割是一个综合考虑各种信息和视觉效果来模拟人类视觉系统解译影像的过程[6]。分形网络演化[7](fractal net evolution approach,FNEA)凭借其结合形状、光谱、纹理信息的优势广泛应用于影像分析领域,但该分割方法需要设置多种参数,利用手动试错的方式才能得到较好的分割效果,难以满足当前分割任务需要。在实际应用中,模糊C均值聚类[8](fuzzy C-means,FCM)是各领域最常用的分割方法之一,相对于其他方法主要有3个明显的优势:FCM是一种无监督无标签的聚类分割,减少了人为干预[9];FCM分割模型参数少且稳定性好;FCM具有较强的空间约束能力,能够有效的挖掘并融合影像特征信息,易于与其他方法相结合[10-11]。越来越多的FCM方法应用到影像分割领域中,文献[12]将直方图和遗传算法融入FCM算法,对高分辨率无人机航拍影像进行分割和车辆提取;文献[13]利用FCM对无人机航拍影像进行颜色分类,估算出各主色调相似的分布图,最后进行水平集方法分割;文献[14]提出一种对数函数FCM算法分割无人机影像。这些试验均表明FCM推动了无人机影像分割的发展。
超像素的出现也为FCM聚类分割提供了新思路[15],文献[16]提出了一种用于彩色图像分割的超像素的快速FCM聚类算法,该算法利用自适应形态学重建[17]生成超像素,将超像素引入FCM目标函数,避免像素点的重复运算。文献[18]在快速FCM聚类的基础上提出一种改进的FCM算法,将原始超像素算法替换成简单线性迭代聚类[19](simple linear iterative clustering,SLIC)来生成超像素,达到更佳的分割效果。针对地物复杂,目标多样的高分辨率遥感影像,文献[20]提出了一种高分辨率遥感影像分割方法,该方法应用形态学重建分水岭得到超像素影像,融合光谱特征的FCM合并超像素,得到了很好的高分辨影像分割效果。
上述方法不可避免地存在一些问题:①大多方法仅适用于背景简单、目标单一的彩色图像,不能直接用于无人机影像分割,否则会出现严重的错分误分现象;②无人机影像分辨率高,现有聚类分割方法难以提取精细的地物信息,无法准确捕捉边界细节轮廓,分割结果边界依附能力弱;③由于没有充分考虑超像素之间的不确定性,没有在分割过程中引入超像素间相互影响的信息,导致现有的基于超像素的模糊聚类方法分割结果不稳定,即在相同参数设置的情况下产生不同的分割结果;④当前聚类分割方法大都需要手动设置聚类数目,无法实现全自动聚类分割。
针对上述问题,本文采用边界推进分水岭超像素算法(boundary marching watershed super-pixels,BMWS)来有效贴合地物真实边界,以解决分割结果边界依附能力弱这一问题,利用隐式马尔可夫随机场(hidden Markov random field,HMRF)和重缩放密度峰值(rescaled density peak,RDP)算法来克服现有流行FCM分割不稳定、需要手动设置聚类数目等难点,提出了一种顾及超像素光谱特征的无人机影像自动模糊聚类分割方法(boundary marching watershed super-pixels based rescaled density peak M-FCM,BWRM-FCM),该方法不仅可以生成具有精确边界、形状规则紧凑的超像素,构造自适应邻域信息,还能自动获取聚类数目,并利用融合超像素区域光谱特征与隐式马尔可夫随机场的FCM聚类,获得比现有方法更稳定精确的分割结果。
1 方法原理
本文方法主要包括两个部分:第1部分采用边界推进分水岭超像素算法,得到边界依附性强同时紧凑性高的超像素子区域;第2部分提取超像素子区域光谱特征,在此基础上利用重缩放密度峰值算法自动获取聚类数目,最后采用隐式马尔可夫随机场FCM聚类(hidden Markov random field FCM,M-FCM)合并超像素,实现无人机高分辨率影像高精度分割。本文方法的整体流程如图1所示。
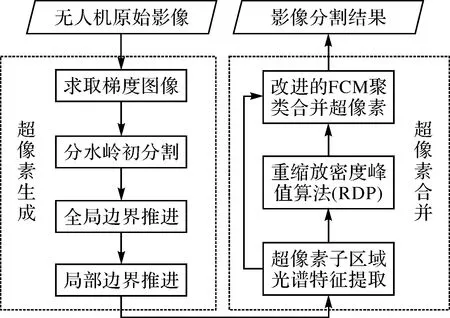
图1 本文分割算法整体流程Fig.1 The flowchart of the proposed segmentation algorithm
1.1 边界推进分水岭超像素(BMWS)
超像素是由相邻像素构成的具有相似颜色、纹理、亮度或其他属性的子块[19]。分水岭超像素[21](watershed superpixels,WP)因其处理速度快、所需参数少被广泛应用,但WP算法生成的超像素边界依附和形状紧凑相互抑制,因此在相对较弱的真实边缘上往往表现不佳[22]。同时,其他常用超像素包括SLIC和线性谱聚类[23](linear spectral clustering,LSC)也存在这样的问题。
为了解决这个问题,本文借鉴了分水岭超像素全局和局部边界两步推进准则(watershed-based superpixels with global and local boundary marching,WSGL)[24]来生成超像素,这两准则分别关注全局边界依附性和局部边界形状规则性,可以在短时间内获取边界依附性强同时形状规则紧凑的无人机高分辨率影像超像素,克服了大多超像素边界依附性和紧凑性必然互相抑制的缺点。
本文得到的超像素算法步骤描述如下。
第1步:获得无人机原始影像sobel梯度图。
第2步:分水岭初分割。在具有N个超像素的影像中,分水岭变换从种子点像素开始扩展到主边界像素,使用颜色同质性和尺寸约束条件的总和作为优先级度量,优先级较低的像素作为边界像素推入最后一个队列(图2(a)),第3步将重新检查边界像素。
第3步:全局边界推进。取出最后一个队列中所有边界像素,检查其邻近超像素,并对边界像素重新贴标签(图2(b))。然后对具有不同标签的像素进行标记,新的未确定标记的边界像素被推送到下一个队列进行push和pop操作,重复处理直到所有相邻边界像素被重新标记,或者直到下一个队列到达M1队列时停止(图2(c))。
第4步:局部边界推进。为了保证同质或颜色渐变区域的超像素是规则紧凑的,通过检查细节相对不丰富区域的平均梯度来选择边界像素,并再次推进,这个过程称为局部边界推进。这一步利用同质区域梯度较低这一特性,将满足条件(边界像素平均梯度小于梯度阈值)的像素推入第一个队列(图2(d)),重复弹出并标记直到所有边界像素被标记或达到M2队列(图2(e))时停止。
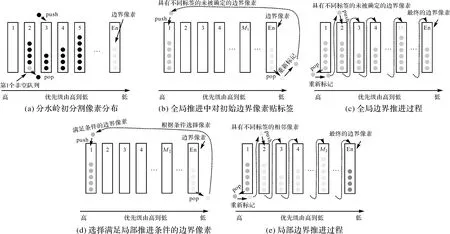
图2 边界推进Fig.2 Illustration of boundary marching
图3是超像素的生成过程示例图。第1步得到梯度图像;第2步生成的初始超像素缺乏边界依附性;第3步全局边界推进后,超像素边界依附性得到改善,但形状变得极为不规则;第4步局部边界推进后,超像素边界依附性高同时边界的轮廓形状规则紧凑。该方法仅对边界像素进行多次处理,因此具有时间效率。
1.2 全自动模糊聚类分割算法(RM-FCM)
FCM是一种依赖于全局特征的无监督方法,而超像素的生成依赖于局部特征[25],二者结合用于影像分割,能显著提升分割效果;但现有结合超像素的FCM分割方法受到分割不稳定,需人工设定聚类数目的限制。为了克服这些限制,本文基于超像素光谱特征,将重缩放密度峰值算法自动获取的聚类数融入隐式马尔可夫随机场FCM(rescaled density peak M-FCM,RM-FCM)算法中,从而实现全自动分割。

图3 超像素生成过程Fig.3 Process of superpixel generation
1.2.1 超像素子区域光谱特征
本文采用区域光谱均值的统计直方图来描述超像素的光谱特征。原始影像经超像素算法获得了N个超像素,每个超像素均视为一个子区域,子区域∂i(i=1,2,…,N)光谱均值表示为ζi={Ri,Gi,Bi}。其中
(1)
(2)
(3)
式中,Rj、Gj、Bj分别表示超像素子区域∂i中某一像素j的R、G、B颜色空间的向量值;hi表示∂i中的像素点个数。令S={ζi|i=1,2,…,N}为影像所有超像素在R、G、B颜色空间中的光谱特征集合,特征直方图H={hi|i=1,2,…,N}为对应光谱特征ζi的像素个数。图4为颜色光谱特征分布及其特征直方示例图。
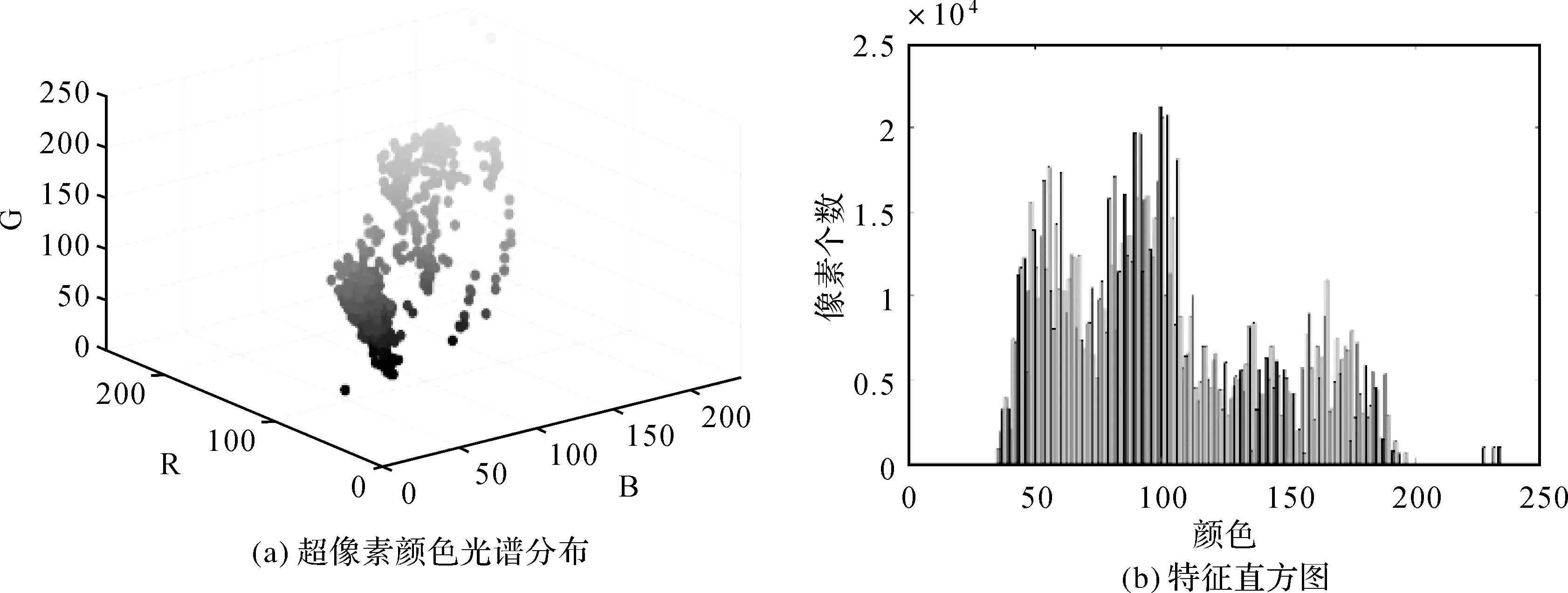
图4 超像素光谱特征示例Fig.4 Illustration of superpixel spectrum features
1.2.2 重缩放密度峰值算法
聚类所提供的影像分割结果往往取决于聚类的数目。快速密度峰值算法[26](clustering by fast search and find of density peaks,CFSFDP/DP)可以自动识别潜在的聚类中心数目,但将该方法直接用于无人机高分辨率影像分割会增加计算复杂度。利用超像素子区域的光谱特征分布及其特征直方图,可以有效提高DP算法的计算效率。根据超像素光谱特征和DP算法原理,用ρi表示的局部密度,δi表示的最小距离如式(4)、式(5)所示
(4)
(5)
式中,Dij表示第i个和第j个超像素之间的欧氏距离;dc是截止距离,通常取2%;δi表示区域i与任何其他密度更高的区域之间的最小距离,具有最高局部密度超像素区域的δi=maxρj(Dij)。结合超像素光谱特征,Dij定义为
Dij=‖ζi-ζj‖
(6)
建立一个水平轴ρ和垂直轴δ的分布图(图5(a)),选择同时满足较高ρ和δ的超像素作为聚类中心。为了简化聚类中心的选择,DP算法单独计算γi=ρiδi,可以得到图5(b)所示的初始决策图。
尽管可以根据归一化排序后的γi决策图(图5(c))设置阈值选择聚类数目,但很难为不同的影像自动提供合适的阈值。
直接利用DP算法获取的决策图只能够实现粗略的自动影像分割,无法精确提取出聚类中心。文献[27]提出一种基于密度比的寻找不同密度聚类中心算法:将原始数据按其密度分布进行重缩放,即把密度高的区域进行扩张,密度低的区域继续收缩。利用这种思想对DP算法进行处理,可以得到一个更加合理稳定的决策图。重缩放密度峰值算法目的是将原来的决策图γi映射到一个新的决策图φi中,寻找归一化并降序排列的φi(图5(d))的最大间隔以输出聚类数目c
c=argmaxi(φi-φi+1)
(7)
输入为归一化γi,φi为映射结果,定义为
(8)
可以通过式(9)—式(10)计算ψ(χe)
(9)
(10)
式中,E={χ1,χ2,χ3,…,χa+1}为一组数据间隔,χ1=0,χ2=1/a,χ3=2/a,…,χa+1=1,a为范围[0,1]内的间隔数,通常设置为a=1000,1≤e≤a+1,η′为邻域半径,默认设置为0.1。
通过图5可以看出,重缩放密度峰值算法能够有效地区分聚类和非聚类中心,找到最佳聚类数以实现全自动聚类。

图5 RDP算法结果Fig.5 Illustration of RDP results
1.2.3 隐式马尔可夫随机场模糊聚类(M-FCM)
传统的FCM算法需要计算每个像素点到聚类中心的距离,当影像分辨率较高时,计算复杂度很高。增强FCM[28]通过在灰度级而不是像素上进行聚类来提高计算效率,在此基础上,文献[20]将超像素光谱特征融入FCM进行高分辨率影像分割,不仅降低了计算复杂度,还将自适应局部空间信息引入目标函数来提高影像分割效果,其目标函数J定义为
(11)
上述方法仅使用欧氏距离来度量不同超像素区域之间的相似性,没有考虑超像素间相互影响的信息,这些会导致复杂影像分割结果不佳。为此,引入隐式马尔可夫随机场[15,29]来提高影像分割效果,本文将FCM算法的灵活性与HMRF模型[30-31]的空间模式建模能力相结合,利用超像素和RDP提供的聚类数,提出的目标函数如下
(12)

在式(12)中,多元高斯分布Φ(ζl|vk,Σk)定义为
Φ(ζl|vk,Σk)=ln(-ρ(ζl|vk,Σk))
(13)
式中,ρ(ζl|vk,Σk)是高斯密度函数,定义为
(14)
式中,D代表影像数据的维数;Σk是一个D×D的对角矩阵;|Σk|为Σk的行列式,于是可以得到

ln|Σk|+Dln(2π))
(15)

(16)
式中,λ1和λ2是拉格朗日乘子,通过求解,可以得到
(17)
(18)
(19)
(20)
根据式(17)—式(20),得到结果矩阵U=[μlk]N×c,聚类中心矩阵V=[vlk]D×c,协方差矩阵Σ=[Σk]D×D×c和先验概率π=[πk]1×c。为了获得最优解,设置迭代次数t,不断迭代至max{Ut-Ut+1}<η(最小误差阈值)时停止。
总结上述算法流程,得到用于无人机影像的顾及超像素光谱特征的自动模糊聚类分割算法(BWRM-FCM),如算法1所示。
算法1:BWRM-FCM
输入:原始影像(Image),N
初始化:U0,V0,Σ0,π0,t=50,η=10-5
通过边界推进分水岭超像素(BMWS)算法得到S和H,即
(S,H)=BMWS(Image,N)
S={ζi|i=1,2,3,…,N}
H={hi|i=1,2,3,…,N}
通过重缩放密度峰值(RDP)算法得到c,即
c=argmaxi(φi-φi+1)
Repeat
通过式(17)更新Ut+1
通过式(18)更新Vt+1
通过式(19)更新Σt+1
通过式(20)更新πt+1
if max{Ut-Ut+1}<ηthen
Break;
else
t←t+1
else if
Until达到最大迭代次数
通过ResImage=display(U,V)得到ResImage
输出:结果影像ResImage
2 试验与分析
2.1 试验数据
本文选取了两组数据(表1)进行试验:第1组试验数据记作A,包含红、绿、蓝3个波段的地物简单的无人机影像;第2组试验数据记作B,包含3幅地物较为复杂的影像,其中2幅是包含红、绿、蓝3个波段的无人机影像,另外1幅是ISPRS提供的高分辨率航空正射影像,包含近红外、红、绿3个波段。
表1 试验数据介绍
2.2 超像素试验效果与稳定性分析
2.2.1 超像素试验效果对比
采用SLIC、LSC、WP、WSGL和本文方法对第1组图像进行超像素分割,证明本文采用的超像素生成方法的有效性,图6分别给出了获得的超像素示例图。根据原文选择最优参数,超像素个数设置N=1500。由图6可以看出,SLIC结果为规则多边形,但没有充分遵守边界;LSC和WSGL这两种方法可以很好地依附边界,但是形状不够紧凑,很难区分复杂地物细节;WP边界依附能力弱且形状不规则。这4种方法生成的超像素没有办法同时满足边界依附性和形状规则性。结合表2,本文方法在兼顾效率的情况下,实现了边界强依附性及细节不丰富区域超像素的规则和紧凑。
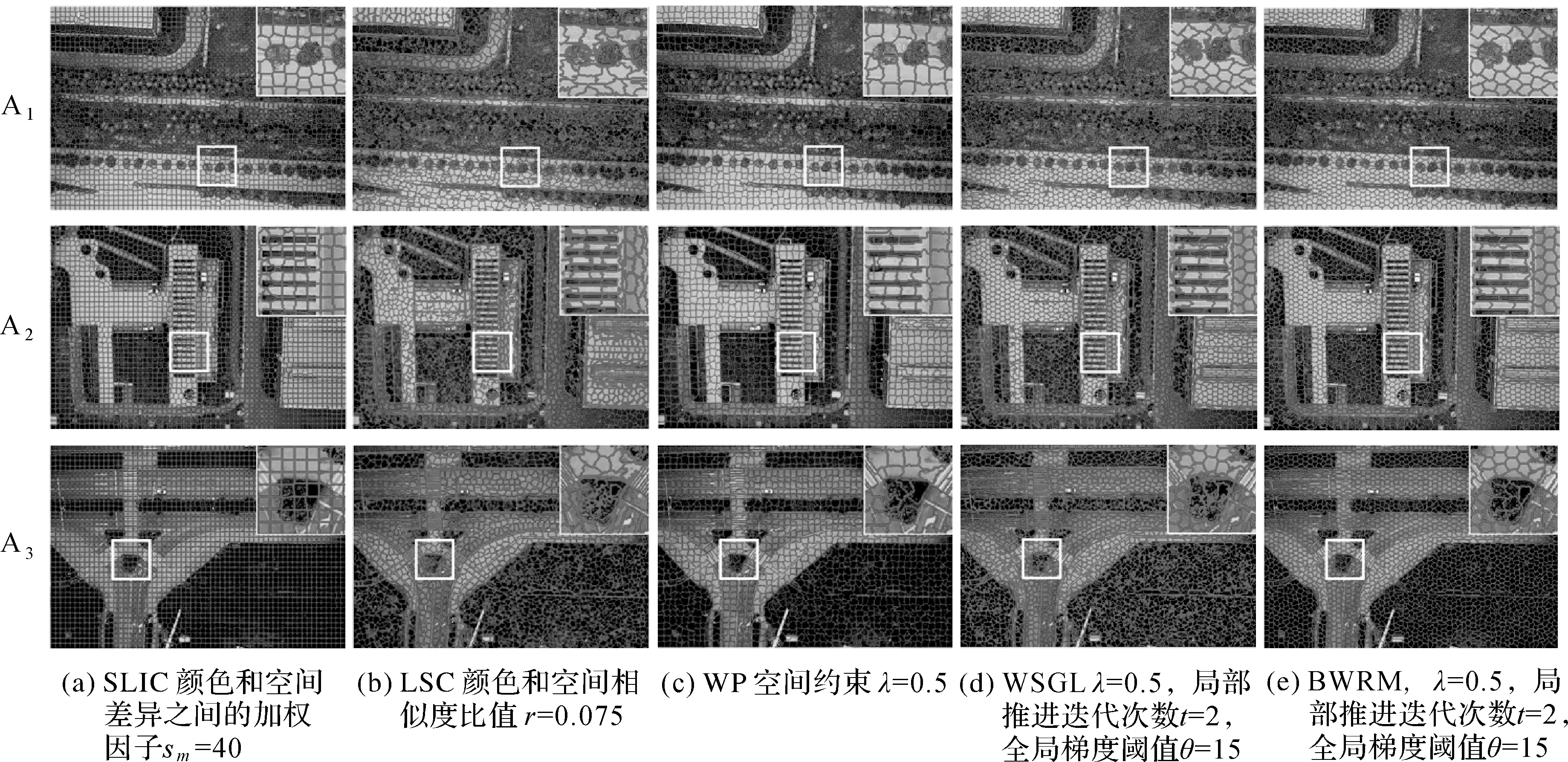
图6 超像素结果对比Fig.6 Comparison of superpixel results

表2 超像素运行时间
2.2.2 算法稳定性分析
本文提出的是一种稳定准确的分割算法流程,为了验证该方法的稳定性,即聚类分割结果和设置的超像素个数无关。选择第1组数据,分别设置超像素个数为800、1000、1200、1400进行试验,模糊聚类分割结果如图7所示。结果表明:在合适的范围内,对不同个数的超像素聚类后的分割结果几乎一致,因此改进的聚类算法稳定性较高,超像素数目对分割结果影响很小。
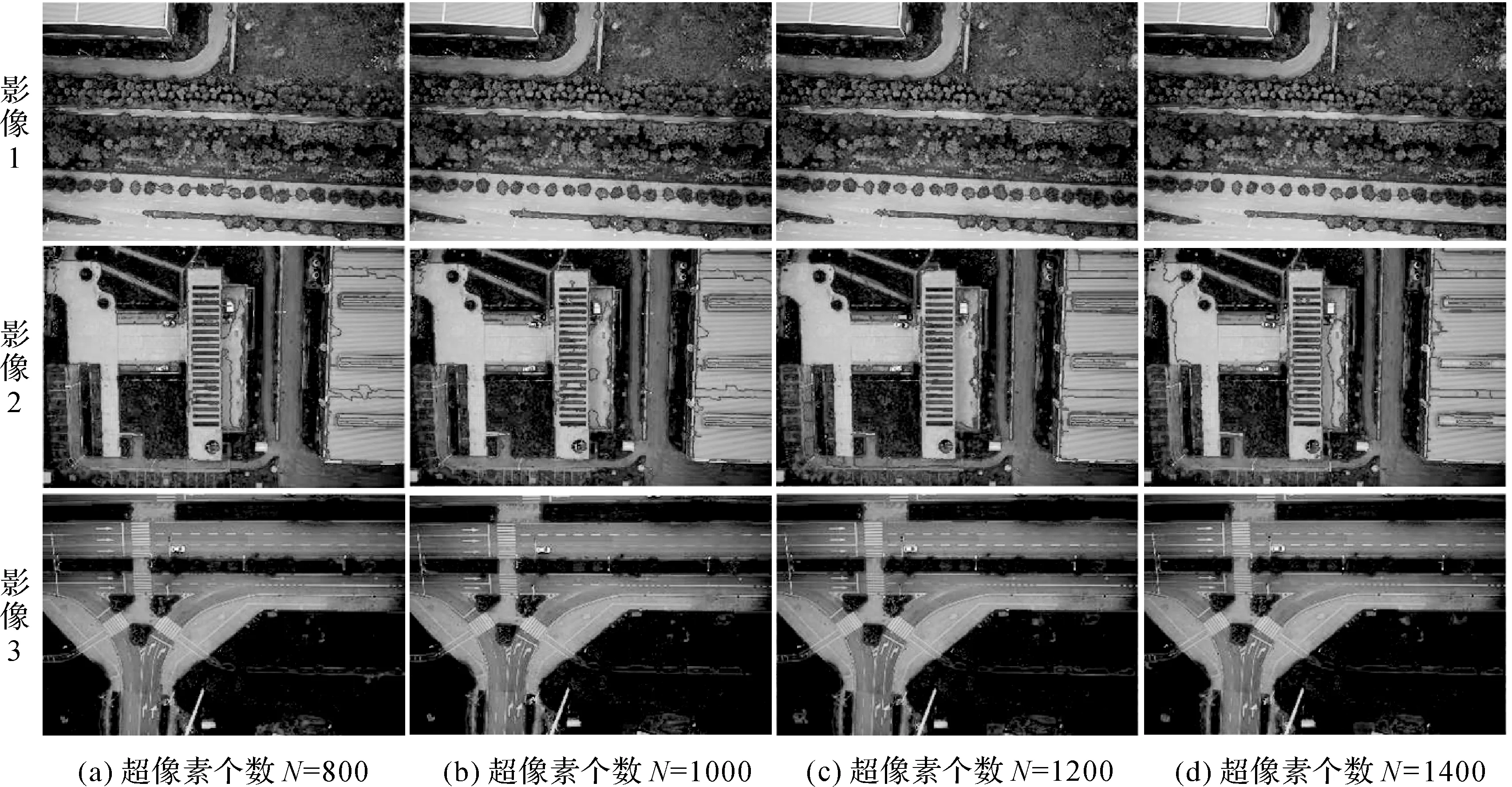
图7 聚类稳定性分析Fig.7 Analysis of cluster stability
2.3 影像分割试验分析
为了充分验证本文方法的优越性,本文采用定性和定量两种方式进行试验结果精度评价。选用8种分割方法进行定性比较,为了方便,简化了8种方法的名称,见表3。FNEA是分形网络演化算法,M-IFCM是文献[20]提出的分割算法,BWRM-FCM是本文方法。方法M-RFCM、S-RFCM、L-RFCM、W-RFCM与BWRM-FCM对比试验的目的是分析超像素对分割结果的影响,B-IFCM和BWRM-FCM对比试验用于揭示不同聚类合并算法对分割效果的影响。
2.3.1 第1组试验结果
除FNEA以外,其余对比方法和本文方法都需设置3个必要参数,即加权指数,最小误差阈值和最大迭代次数,分别设为2、10-5和50。对比方法选择最优参数或遵循原文:FNEA经过多次手动调整参数(包括形状权重S,紧凑度权重C,分割尺度SP)选择最佳分割结果进行展示;M-IFCM和B-IFCM需对不同影像手动设置不同的聚类数目c;M-RFCM无参数设置;方法S-RFCM、L-RFCM、W-RFCM、B-IFCM和BWRM-FCM超像素个数N统一设置为800。图8—图10展示出了分割视觉效果,为了更加方便地目视比较试验结果,在结果图中标注黄色矩形框来表示分割结果较差的区域。

表3 对比方法及其描述

图8 A1试验结果Fig.8 Experimental results of A1

图9 A2试验结果Fig.9 Experimental results of A2

图10 A3试验结果Fig.10 Experimental results of A3
A1包含了简单建筑物、道路、片状植被和独立成排树木,主要验证算法对植被特别是单个树木的提取效果。图8中,FNEA无法清晰提取出单个树木和道路的轮廓;M-IFCM可以提取出单个树木的具体轮廓,但产生了轻微道路欠分割和房屋过分割;M-RFCM、S-RFCM和W-RFCM可以将光谱信息明显的植被识别出来,但仍存在独立树木未分割出来或与道路错误分割现象;L-RFCM植被区域个别位置出现分割线极不规则;B-IFCM在纹理、光谱信息丰富的植被部分,无法有效合并多余超像素区域,导致分割过度破碎。A1分割结果中,本文方法BWRM-FCM的分割结果轮廓清晰、边界附着效果好,保留了单个树木及其他地物细节信息,取得了更接近目视解译结果的分割效果。
A2为建筑区,显著的细节信息和纹理结构增加了分割难度。在图9中,FNEA、M-IFCM和M-RFCM均存在欠分割现象;S-RFCM道路和植被分割边界与参考边界整体契合程度较高,但细节捕捉能力稍有不足。W-RFCM的分割效果最差,难以区分道路、植被和建筑物的边界轮廓。B-IFCM无法提取道路边界,建筑物内部分割线过于扭曲。BWRM-FCM则能合理分割出道路、建筑物和植被,有效提取了细节信息,虽然在建筑物内部也出现了分割线不规则现象,但整体上能达到较为满意的视觉效果。
A3覆盖了一个交通路口,如图10所示。FNEA、M-IFCM和W-RFCM结果图中,存在人行道和植被误分割,地物的交界处的分割效果不理想;M-RFCM图中三角区的植被无法识别,说明该方法难以实现对光谱特征差异不明显的地物进行分割;B-IFCM产生了过分割;S-RFCM和L-RFCM的分割效果优于前5种方法,仍存在些许的分割边界线不规则现象。BWRM-FCM通过精确的拟合地物光谱和分布特征,达到了良好的目视分割结果。
2.3.2 第2组试验结果
相较于第1组试验,第2组试验数据分辨率降低,包含的地物目标更加丰富,纹理结构更加复杂,分割难度也随之增加。图11—图13为第2组试验结果,参数设置(除超像素个数N=1200外)与第1组试验相同。
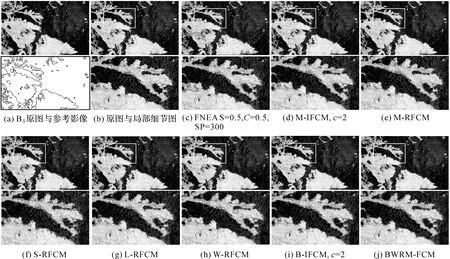
图11 B1试验结果Fig.11 Experimental results of B1
B1影像主要用来测试分割方法的边界提取效果,如分割结果图11所示,对于前景与背景明显不同的影像,所有算法都能有效分割。在结果图中标注白色矩形框来表示分割局部细节区域。局部细节图中,由于方法S-RFCM和W-RFCM使用的超像素的边缘附着能力弱,分割边界提取效果明显较差;虽然FNEA、M-IFCM、M-RFCM和L-RFCM获得了比前2种方法好的边界附着结果,但是仍存在植被提取不完整的情况;由于B-IFCM和BWRM-FCM使用了本文的边界推进分水岭超像素算法,该算法能有效依附边界,最终获得良好的分割结果。
B2覆盖了住宅区,包括规则建筑物、道路以及大面积植被,纹理信息相对复杂,主要测试各分割算法对颜色亮度对比度不高的区域的目标识别能力。由图12可以看出,M-IFCM和M-RFCM出现了欠分割现象,遗漏了部分细节信息;虽然S-RFCM、L-RFCM和W-RFCM改善了欠分割,由于SLIC、LSC和WP超像素算法的边界捕捉能力不足,这3种方法在房屋与道路颜色对比度不高的区域分割不理想;W-RFCM将色彩相近的建筑和道路错误地合并在一起,植被区域存在过分割;在B2影像中,方法FNEA分割总体效果较好,但在植被和道路颜色差异特征不明显的地方出现了轻微的误分割现象;本文方法能在颜色亮度对比度不高的区域合理识别出房屋与道路,完整地保留了道路、房屋,植被等区域的具体细节。
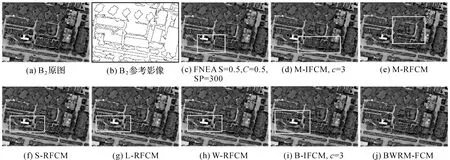
图12 B2试验结果Fig.12 Experimental results of B2
为了验证本文方法的稳健性和泛化能力,选择一幅ISPRS提供的航空正射影像,影像整体偏向于纹理特征的呈现,分辨率高,包含道路、裸土、植被和建筑物,地物细节丰富且复杂。在图13中,所有算法都能大体提取出地物轮廓。除了M-IFCM、M-RFCM和本文方法BWRM-FCM外,其余方法生成了包含大量孤立小区域的分割结果;此外,所有对比方法都无法正确分割建筑物内部复杂区域,说明本文所提方法不仅可以抑制过分割,还能捕捉必要的地物细节。本文算法考虑了超像素子区域光谱特征和类属的不确定性情况,使得影像分割结果更理想,边界定位更准确,分割线更加自然光滑,分割形状大小相对于地物实际边界更一致。
2.3.3 定量评价方法
定性分析通过视觉效果直接对比分析;定量评价则通过精度(presicion,P),边界召回率(recall,R)以及F1score[5]来对比评价,具体计算公式为
(21)
(22)
(23)
式中,TP为地物目标被正确分割得到的结果像素个数;FP为背景被分为地物目标的像素个数;FN为地物目标被分为背景的像素个数。这3个指标的取值范围均在[0,1]之间,P为分割的精确程度,值越大分割精度越高;R为边界的召回效果,值越大边界依附性越好;由于P和R是相互制约的,F1可以实现了二者的权衡,代表整体的分割精度,值越大整体分割效果越好。计算所采用的实际地物边界均使用ArcGIS软件目视解译获取。
表4列出了本文方法和其余对比方法的定量评估结果,提供了对分割效果的总体评价,每种方法中定量指标的最佳结果用粗体标记,第2个最好的结果用下划线标记。由表4可以看出,在第1组试验中,FNEA的精度和边界召回率以及F1普遍低,说明FNEA方法分割效果最差;M-IFCM和W-RFCM的指标值较低,说明这些算法在无人机影像分割方面效果不佳;M-RFCM算法的精度高,召回低,与定量分析M-RFCM欠分割结果一致;由于B-IFCM的聚类算法难以实现对无用区域的合并,导致精度低,召回高,呈现过分割状态。S-RFCM和L-RFCM评价指标值相似,略高于前面几种算法;由于BWRM-FCM采用的边界推进分水岭总是比SLIC和LSC生成更好的超像素区域,因此BWRM-FCM比S-RFCM和L-RFCM取得了更好的精度。根据表4,在大多数情况下,本文方法获得最高的精度和边界召回率及F1,说明本文方法的结果最接近对应参考影像边界。全自动的模糊聚类过程使得该方法在无人机高分辨率影像分割中的效果更好。
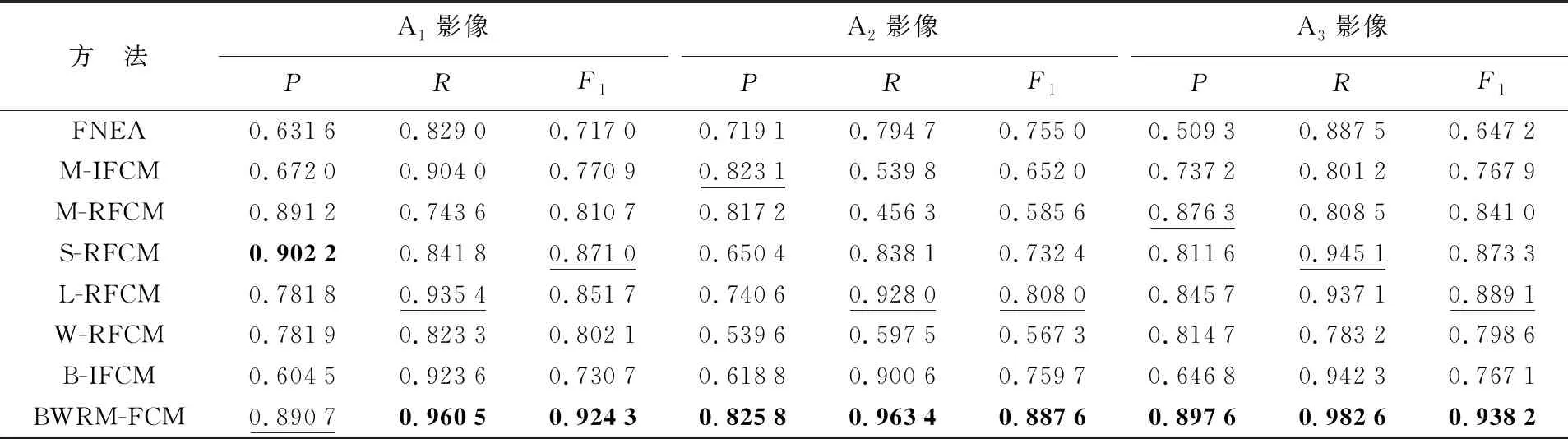
表4 第1组试验分割结果评价
表5为所有方法对第2组试验数据的定量评价结果。由表5可以看出在第2组试验中,FNEA精度评价值有所提高,较好地保留了复杂地物的纹理特征信息;M-RFCM的F1明显降低,说明该方法难以实现对复杂场景影像的准确分割;采用本文方法BWRM-FCM进行分割试验,能同时满足较高的精度和召回率,获得最高的F1,这表明本文方法能兼顾更多地物特征,在分割尺度难以把握的影像中也能够自动获取聚类数目,达到很好的分割效果。
两组试验证明了在不同分辨率和复杂度的影像中,本文方法都能获得最佳的视觉效果和分割精度,表明该方法在边界依附性,形状紧凑度、抑制过分割和避免欠分割等方面具有明显优势。相对而言,第1组试验数据分辨率更高,地物数量较少、分布特征明显且边界清晰,所有方法的分割效果更优,说明影像的分割精度受原始影像的分辨率、覆盖范围、地物分布及边界复杂程度等难度因素的影响。第2组试验增加了分割难度,但对本文方法影响不大,其分割结果与对应的精度评价显著高出其他方法,充分证明了该方法的适用性。
3 结 论
本文提出了一种针对无人机高分辨率遥感影像,顾及超像素光谱特征的自动模糊聚类分割方法。综合两组试验结果对比分析,该方法具有以下优点。

表5 第2组试验分割结果评价
(1) 针对现有方法边界依附能力弱的缺点,利用边界推进分水岭超像素生成方法,生成具有精确边界、形状规则紧凑的超像素,提取超像素子区域光谱特征以构造自适应邻域信息的影像分割,有效贴合影像目标真实边界,获得理想的分割结果。
(2) 为克服现有流行FCM分割不稳定、需要手动设置聚类数目等难点,首先采用重缩放密度峰值算法来自动获取准确的聚类数目,然后为提高聚类的稳定性,引入超像素区域特征和HMRF思想以改进模糊聚类合并算法,所提的自动模糊聚类不仅提高了影像分割的稳定性,还获得了更好整体分割效果,是一种简单有效的全自动聚类分割方法。
由于本文方法只使用了超像素颜色光谱特征,没有考虑纹理特征及其他信息的有效提取,今后工作将探索更多特征信息,实现多特征融合的自动化分割。
