基于多智能体的舰船装备健康状态仿真评估方法
2022-05-31丁善婷董正琼
丁善婷 王 淼 董正琼 聂 磊
1湖北工业大学机械工程学院,武汉,4300682湖北省现代制造质量工程重点实验室,武汉,430068
0 引言
舰船是一种典型的多任务、多系统特征的大型复杂装备系统,其健康状态对装备的任务成功性及其总体效能发挥具有重要影响[1]。随着装备系统集成化、信息化程度的提高,开展舰船装备健康状态评估,能够及时、准确地为舰船的使用、管理提供决策依据,对确保舰船安全可靠运行具有重要意义。目前常用的健康度评估方法有模型驱动、知识驱动和数据驱动等。其中,模型驱动是对装备按层级分析的原理进行深入研究而设计的一种物理模型[2-3]。多智能体仿真建模技术[4-7]作为一种模型驱动健康度评估方法,通过各智能体间的通信、合作、管理和控制,客观表达装备多任务、多系统参与的复杂过程,在复杂装备基于任务的健康度仿真评估研究方面具有优势。
目前,国内外学者结合多智能体技术对复杂系统状态性能及总体效能评估等方面进行了大量研究。FENG等[8]基于多智能体建立了考虑机器故障处理、人为错误、环境干扰、维护和重建信息等机制下的复杂人机交互系统(complex human-machine system,CHMS)性能和可靠性综合评估分析方法。寇力等[9]采用多智能体的仿真方法对装备保障体系进行建模和仿真,对保障资源进行合理的运筹,使装备获得及时、有效而经济的保障,从而充分发挥装备的效能。RAJPUT等[10]提出了一种新的体系结构,支持基于智能体的分布式系统解决故障恢复方面的问题,以实现其自适应性。REN等[11]基于多智能体建立了舰船指挥控制的基本流程,为未来舰船指控系统的智能化发展提供了参考。申莹等[12]基于多智能体技术探究了面向任务环境的装备系统可靠性仿真机理,研究不同环境条件下的系统可靠性特征,为构建通用、实用的系统可靠性理论奠定了基础。上述文献采用多智能体技术,从可靠性、维修性、保障性、任务成功性等角度对舰船装备效能进行了研究,但对舰船所处动态海洋环境对装备健康状态影响,及间接对舰船任务成功产生的影响考虑不足。海洋环境对舰船执行任务的影响主要体现在以下方面:加速舰船装备的性能退化,结构损坏、功能丧失以及降低维修人员维修效率等[13],因此考虑环境因子对舰船执行任务的影响能更为真实、客观地评估舰船装备的健康状态以及任务成功性。
本文以舰船装备为对象,提出利用多智能体仿真建模方法,建立了一种考虑环境动态影响的“任务-装备-维保-环境”的装备健康状态评估模型。结合典型示例进行仿真建模验证,为舰船装备的论证和研制工作提供技术支持。
1 健康状态评估模型
舰船装备映射的多智能体系统是典型的层级式组织结构[14],分析舰船执行任务的过程,构建其“任务-装备-维保-环境”动态交互模型并将其映射成多智能体系统。多智能体系统中(MAS)包括“任务智能体群(task agents,TAs)”“装备智能体群(machine agents,MAs)”“维保智能体(maintenance agents,MtAs)”及“环境智能体(environment agent,EA)”,即
MAS={EA,TAs,MAs,MtAs}
(1)
任务智能体群(TAs)向装备智能体群(MAs)发布任务,装备智能体群中上层舰船智能体(machine agent,MA)将任务分解并分配到下层子系统智能体(subsystem agent,SA)及部件智能体(part agent,PA)节点,每个智能体成员仅与前驱和后继智能体节点通信和信息交互,多智能体系统内部结构及相互通信机制如图1所示。
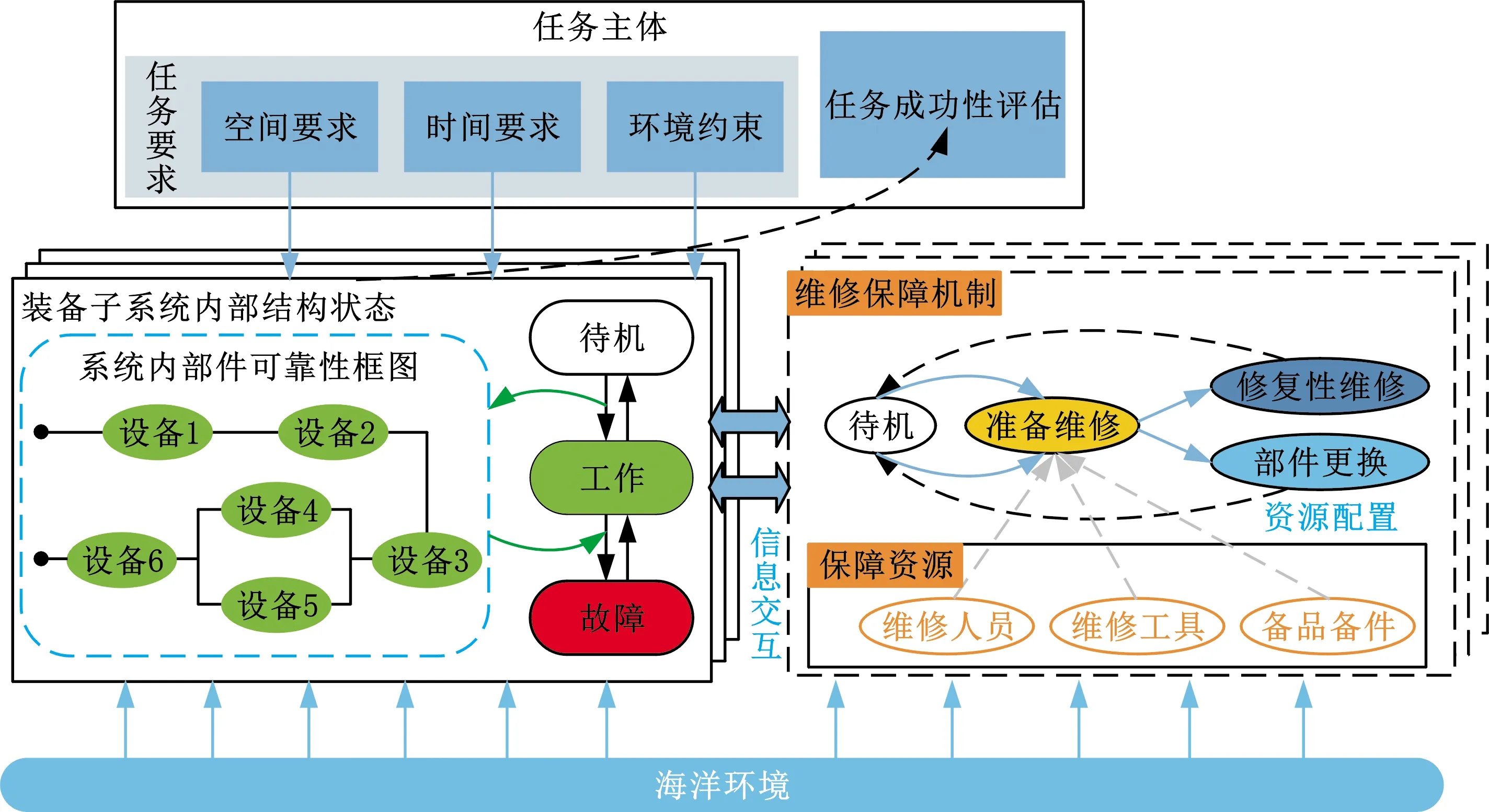
图1 “任务-装备-维保-环境”相互作用示意图Fig.1 “Mission-equipment-maintenance-environment” interaction diagram
任务智能体群(TAs)作为最高层智能体,模拟舰船“多任务”的特征,包括舰船装备任务要求确定、任务分配以及任务结束后健康状态及任务成功率评估。
装备智能体群(MAs)用于模拟舰船在执行任务全程的运行状态动态变化情况。根据舰船中各部分功能不同,将其分解为“舰船(MA)-子系统(SA)-部件(PA)”三层嵌套结构,舰船装备的“多状态”由MA的状态集体现,即
State(MA)={待机,正常,退化,故障}
(2)
各层级之间的状态传递主要有两种形式,一是“舰船”向“部件”由上至下的工作状态传递方式;二是“部件”向“舰船”由下至上的健康状态及故障逻辑传递方式,各层级之间以可靠性框图的形式相互联系,底层部件健康状态变化将直接或间接导致舰船系统状态变化,若部件失效,则触发PA与MtA的通信机制。
“多状态”舰船装备完成任务的基础是有维修保障机制的支持,维保智能体(MtA)的状态集如下:
State(MtA)={待机,修复性维修,备件更换}
(3)
保障数据库(Sr)时刻为维修机制提供资源支持,包括维修需要的时间、人员、工具、备品备件等。
环境智能体(EA)用于模拟影响舰船装备执行任务的海洋环境,构建海洋环境因子,包括温度、湿度、风浪、空气环境等多种因素,按照GJB 4000-2000对海况进行分级(0~9级海况),综合描述海洋环境对舰船装备寿命以及舰员级故障装备维修时间的影响。
基于“任务-装备-维保-环境”模型构建舰船多智能体系统,开展多任务多阶段多系统的装备健康状态评估。
2 多智能体系统内部构建
舰船复杂性由多智能体系统的结构、规则、行为体现。分别对任务智能体群(TAs)、装备智能体群(MAs)、维保智能体(MtA)以及环境智能体(EA)的内部结构和行为规则进行构建。
2.1 任务智能体群
舰船装备执行任务是一个典型的“多阶段、多系统”工作过程。定义任务智能体群TAs={TA1,TA2,…,TAj,…,TAm},m表示舰船需要执行的任务阶段数量;对每个任务阶段的实际过程进行分析,则任务阶段智能体TAj可表示为
任务阶段智能体(TAj)=〈输入集(X),输出集(Y),任务分配规则〉

(4)
任务智能体(TA)任务分配应满足完整性的原则,可以是任务功能意义上的完整,也可以是内容意义上的完整,即应当满足
TA=TA1∪TA2∪…∪TAm
(5)
2.2 装备智能体群
装备智能体群(MAs)作为任务成功性与健康状态评估的主体研究对象,其内部为“舰船(MA)-子系统(SA)-部件(PA)”的三层嵌套结构。建立舰船装备整体的健康度数学模型,对环境影响下的舰船装备任务成功性及健康状态进行评估。
2.2.1装备状态变化机制
舰船装备(MA)由n个不同功能的子系统(SA)构成,其中子系统(Si)有q种性能状态。任意一个子系统的状态变化都会引起舰船装备的性能状态变化,因此在任务过程中的某一时刻t,装备健康状态M(t)受子系统性能状态Si(t)的影响,即
M(t)={S1(t),S2(t),…,Sn(t)}
(6)
Si(t)∈Si={Si1,Si2,…,Siq}
(7)
舰船装备子系统的状态变化受其部件(PA)的影响,通过各子系统的可靠性框图可确定部件与子系统之间的状态变化逻辑。例如,舰船某子系统(Si)由k个部件组成,其可靠性框图如图2所示[16]。
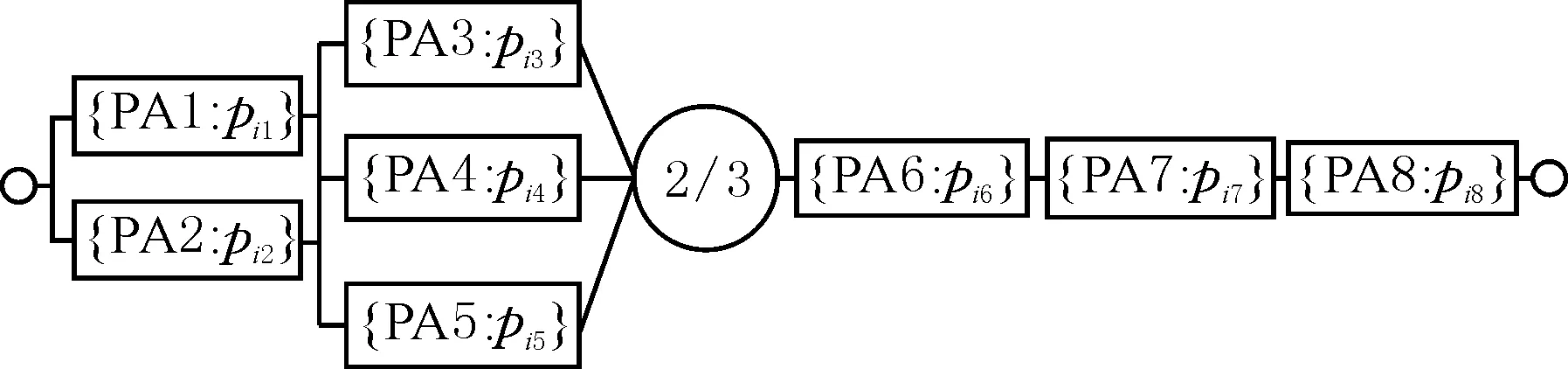
图2 舰船装备某子系统可靠性框图Fig.2 Block diagram of reliability of a subsystem of naval equipment
用pik表示第k个部件的状态值,其运行状态集为
State(PA)={正常,非致命性故障,致命性故障}
(8)
则部件k的状态值pik为
(9)
其中,非致命性故障定义为舰船执行任务阶段部件发生的可修复故障,此类故障的发生时间用平均故障间隔时间(mean time between failure,MTBF)表示;致命性故障定义为在舰船执行任务阶段设备发生的限于条件而不可修复的故障,这类故障的发生对舰船完成任务有直接影响,其故障发生时间用平均致命性故障间隔时间(mean time between critical failure,MTBCF)表示。
基于图2所示的子系统(Si)可靠性框图的串并联结构分析,其性能状态Si(t)可表示为
Si(t)=Φ(pi1,pi2,…,pik)=
(pi3pi4+pi3pi5+pi4pi5)(pi1+pi2)pi6pi7pi8
(10)
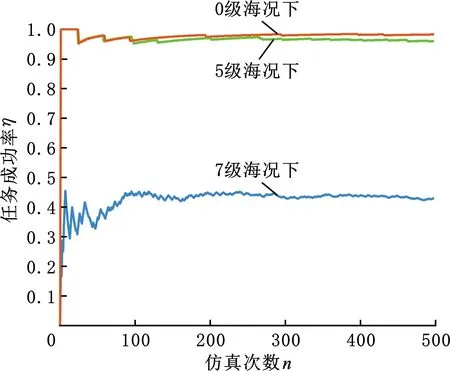
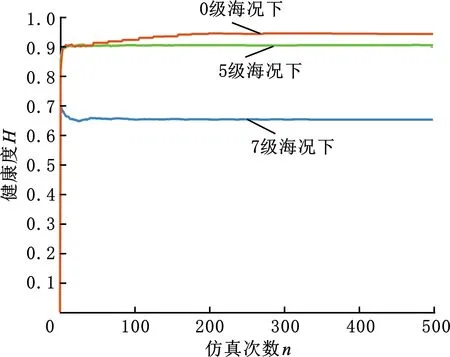
Si(t)≥1表示子系统(Si)处于“正常”状态;0 装备以及子系统状态变化的原因为其部件产生故障或失效,当仿真抽样部件状态变化时,假设各部件平均故障间隔时间服从指数分布,采用随机抽样的方法确定,记为 (11) (12) 2.2.2装备整体的健康度数学模型 正常工作条件下部件的失效是一个耗损的过程,因此以部件的正常工作时间定义其基本健康度为 (13) 在“舰船(MA)-子系统(SA)-部件(PA)”嵌套结构中,故障/健康状态的传递逻辑由部件(PA)向上传递。 假设舰船装备子系统(Si)为一个串联结构,则系统健康度Hi可表示为 (14) 若为并联结构,则子系统(Si)健康度Hi可表示为 (15) 若为3/2表决结构,则子系统(Si)健康度Hi可表示为 Hi=hi1hi2hi3+(1-hi1)hi2hi3+(1-hi2)hi1hi3+ (1-hi3)hi1hi2 (16) 子系统(Si)若为混联结构,则健康度Hi可表示为 Hi=hshphv (17) 其中,hs为串联结构健康度;hp为并联结构健康度;hv为表决结构健康度。经上述分析,可靠性如图2所示的子系统(Si)的健康度Hi可表示为 Hi=[1-(1-hi1)(1-hi2)]hi6hi7hi8· [hi3hi4hi5+(1-hi3)hi4hi5+(1-hi4)hi3hi5+ (1-hi5)hi3hi4] (18) 当子系统的功能失效时,表现为系统故障,进而影响任务成功性。当舰船装备各系统之间表现为纯串联结构时,健康度(H)为各子系统的最小值,其表达式为 H=min{H1,H2,…,Hn} (19) 舰船装备的维修保障机制由多智能体系统中的维保智能体(MtA)实现,舰船装备中n个不同功能的子系统智能体(SA)对应n个维保智能体,可表示为 维保智能体(MtA)=〈保障资源数据库(Sr),维修保障规则〉; 保障资源数据库(Sr)包括维修时间(tM)、维修人员数量(nP)、维修工具数量(nT)、备品备件数量(nS)和备件更换时长(tS),则保障资源数据集(Sr)可表示为 Sr={tM,nP,nT,nS,tS} (20) 维保智能体(MtA)与故障部件动态交互的维修保障规则如图3所示。子系统(Si)内的故障部件触发维保智能体(MtA)由“待机”状态转变为“准备维修”状态,维修保障机制实现步骤如下: (1)部件按照故障发生的时间顺序依次进入维修队列,并依次进行保障资源充足性判定,若资源充足,则进入“维修”状态,保障资源库中相应资源数量减少;若资源不充足,则故障部件处于“等待维修”状态不变,定时发送资源充足性判定请求,直到资源充足进入“维修”状态。 (2)故障部件进入“维修”状态后,会按照是否需要更换备件分为“修复性维修”和“备件更换”状态,在经历平均故障间隔时间(MTTR)之后,部件恢复正常状态。 (3)故障部件维修完成,离开维修队列,并归还维修中使用的维修人员、维修工具至保障资源库。 图3 维修行为规则示意图Fig.3 Schematic diagram of maintenance behavior rules (4)所有故障部件维修完成,维修队列为空时,维修完成,维保智能体(MtA)进入“待机”状态,返回步骤(1)。 环境智能体模拟舰船执行任务所处的海洋环境,所有的舰船子系统均处于相同的环境中,环境智能体可表示为:环境智能体(EA)=〈知识库(Q),规则库,通信机制〉;知识库(Q)表示环境智能体(EA)所拥有知识的集合,主要是影响舰船装备执行任务的环境因子集;规则库规定环境智能体(EA)的行为规则,即知识库中影响因子对舰船执行任务的动态量化影响规则;通信机制作为通道,保证环境智能体(EA)与其他智能体之间的动态交互,以模拟环境对舰船执行任务的影响。 2.4.1知识库 参照GJB 4000-2000,环境因子中对舰船任务期间的健康状态影响较大的主要有:风Qwind、海浪Qwave、能见度Qvisi、温度Qtemp以及湿度Qhumi等。则环境因子知识库Q可表示为 Q={Qwind,Qwave,Qvisi,Qtemp,Qhumi} (21) 将海况划分为0~9级海况,不同海况等级下风速、浪高及能见度等级划分详见标准GJB 4000-2000中的表072-2、表072-3以及表072-5。 2.4.2规则库 对于知识库中不同量纲的海洋环境因子,采用Sigmoid型函数进行归一化拟合,将0~9级海况作为海洋环境的输入条件[17]。知识库(Q)中环境因子的影响效用函数πi为 (22) 其中,Nst为海况级别,取值范围为 0~7;A、B为常数,取值见表1[18];则2.4.1节中提到的环境因子影响效用集(Π)可表示为 Π={πwind,πwave,πvisibi,πtemp,πhumi} (23) 表1 海况等级对应的常系数A、B值Tab.1 Values of constant coefficients A、B corresponding to sea state levels 资料显示,当海面波高达到2 m海况且等级为5级左右时,离靠漂(锚)泊舰船的操纵就变得十分困难。海面风速达到8级海况且等级为7级时,舰船就容易发生危险,因此将5级海况定为高风险海况,将7级海况定为极限海况。 (24) 在正态分布Nst~N(μst,σ2)中,均值μst表示舰船执行任务时的平均海况等级,可取0~7级;方差σst决定正态分布曲线的形状,表征随机变量Nst的离散程度,由于每级海况相差1级,故σst取0.5。 2.4.3通信机制 环境智能体(EA)具备多个MessageOut信息接口,用于实现与装备智能体群(MAs)以及维保智能体(MtA)的动态交互,其通信规则用于模拟环境对舰船装备性能以及维修保障效能的影响。 (1)环境因子权重。采用层次分析法确定知识库(Q)各环境因子对装备性能以及维修保障效率的影响权重,即 (25) (26) (2)环境因子对装备性能影响。基于上述分析,环境因子对装备性能的综合影响可表示为 (27) 假设舰船装备中部件故障率服从指数分布,其故障率函数满足 z(t)=f(t)/R(t)=λexp(-λt)/exp(-λt)=λ (28) 在环境因子πP的综合影响下,故障率函数可写成 z*(t)=πPz(t)=πPλ (29) 则受环境的影响,式(11)和(12)将变为 (30) (31) (3)环境因子对维修保障影响。环境因子对舰员维修保障效率的综合影响可表示为 (32) 建立舰船装备健康评估多智能体系统时,需要做以下假设:同类型部件故障产生逻辑相同;描述舰船装备中部件的典型状态;维修保障机制中备品备件均为消耗型资源,且不考虑在任务阶段中补充。 采用多智能体建模方法,对环境影响下的舰船装备健康状态及任务成功性进行仿真评估,其仿真流程如图4所示。步骤如下。 (1)“任务-装备-维保-环境”多智能体系统内部逻辑搭建,其中,环境智能体主要建立海洋环境 图4 多智能系统仿真流程Fig.4 Multi-agent system simulation flow 中海风、海浪、能见度、温度以及湿度等因子的动态影响规则,系统需要输入各影响因子的变化范围以及模拟的海况等级;“任务-装备-维保”建模用于模拟舰船装备执行任务时的各种逻辑:①任务分配逻辑;②装备健康状态变化逻辑;③装备故障变化逻辑;④底层部件的故障产生逻辑,系统需输入任务设定的相关参数以及底层部件的可靠性、维修性、保障性等相关参数。 (2)多智能体系统内部搭建完成后仿真运行,循环模拟舰船装备执行任务的实际过程,其具体过程如下:①系统初始化并设置循环仿真次数;②系统运行,舰船装备出航执行任务过程仿真,模拟海洋环境影响下的舰船装备健康状态变化、维修过程以及故障随机产生逻辑;③系统判断任务时间是否结束,判定依据为是否到达规定任务时间;④若单次任务结束,累加仿真次数;若单次任务未结束,则返回步骤②;⑤系统循环仿真,仿真次数持续累加,判断其是否达到规定仿真次数,若达到规定仿真次数,则仿真结束;若未到达规定仿真次数,则返回步骤②。 (3)系统循环仿真结束后,输出装备健康状态数据以及任务成功性相关数据,进行数据分析,得出相关结论。 以某舰动力系统执行巡航任务为例进行仿真建模,对其在海洋环境影响下的健康状态任务成功性进行评估。 (1)环境影响效用值及影响权重确定。基于海洋环境因子影响效用函数建立方法,建立舰船动力系统健康状态评估的各影响因子效用函数,并确立其在不同海况下效用值,见表2。 采用层次分析法AHP确定舰船动力系统执行巡航任务时海洋环境影响因子对动力系统各部件平均故障间隔时间(MTBF)以及平均维修间隔 表2 不同海况影响因子效用值Tab.2 Utility values of factors influenced by different sea states 时间(MTTR)的影响权重。 (2)舰船装备底层参数输入及任务设定。动力系统中包括柴油机、燃气轮机、监控这边、辅助设备、减速设备、轴系以及螺旋桨等部件,其可靠性框图见图3。动力系统中各部件的可靠性、维修性、保障性等参数取自文献[19],见表3。设规定的巡航任务时间(T0)为160 h,规定巡航里程为3200 n mile,舰船装备规定最大航速为35 kn。 仿真工具采用Anylogic(仿程序略),输入上述相关数据,评估系统仿真运行,设置多次循环仿真次数进行试验,分别输出0级(静水)、5级(高风险海况)以及7级海况(极限海况)下,考虑风速、海浪、能见度环境因子影响的舰船动力系统执行任务时的健康度以及任务成功率。运行结果显示,仿真次数定为500时,输出结果已稳定,如图5所示,继续增加仿真次数,其差异可以忽略不计,可认为仿真结果已收敛。 结果表明,在0级海况下(静水中),舰船动力系统执行巡航任务的任务成功率为98.3%,装备平均健康度为0.946;5级海况下,其任务成功率为96.0%,装备平均健康度为0.907,与静水中动力系统的任务成功率和平均健康度相差不大;系统仿真模拟7级海况下,对舰船动力系统健康状态进行评估,其任务成功率为42.9%,平均健康度为0.655,相比0级海况,任务成功率下降55.4%, 表3 某舰船装备动力系统各部件可靠性、维修性、保障性参数Tab.3 Reliability,maintainability and supportability parameters of each component of the power system of a ship’s equipment (a)动力系统任务成功率 (b)动力系统健康度图5 不同海况等级下舰船动力系统仿真结果Fig.5 Simulation results of ship's power system under different sea state levels 平均健康度下降0.328,量化评估结果与专家定性评估结果趋势一致。 (1)基于多智能体技术建立的“任务-装备-维保-环境”于一体的装备健康状态仿真评估模型,通过各智能体间的通信、合作、管理和控制,合理考虑了装备运行过程中各种复杂的因素影响,客观表达了装备实际运行时多任务、多系统参与的复杂过程。 (2)分别构建多智能体系统中的任务智能体、装备智能体和维保智能体,同时构建环境智能体内部规则以反映环境因子对舰船装备执行任务的动态影响,较为合理地量化评估考虑了环境多因素影响的舰船装备的健康状态。 (3)以某型舰船动力系统为例,对所提方法进行了验证,结果表明,5级海况下舰船动力系统的平均健康度和任务成功率与0级海况下(静水中)相差不大,体现了其动力系统具有较好的环境适应性;在7级海况下,动力系统平均健康度和任务成功率相比0级海况下分别降低32.8%和55.4%,量化评估结果与专家定性评估结果趋势一致。该方法较为合理地量化评估了考虑环境多因素影响的舰船装备的健康状态,为舰船装备的论证与研制工作提供了技术支持。

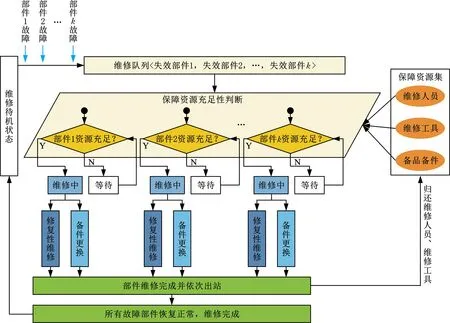
2.3 维保机制
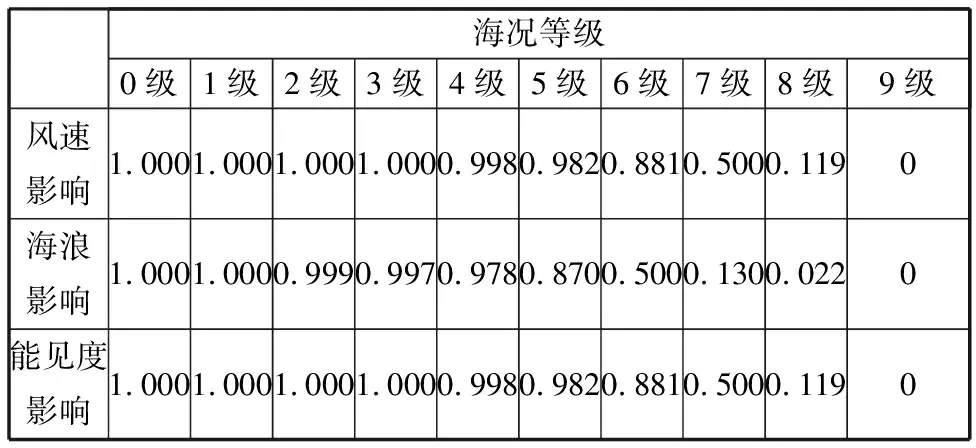
2.4 环境智能体




3 多智能体系统仿真流程
3.1 基本假设
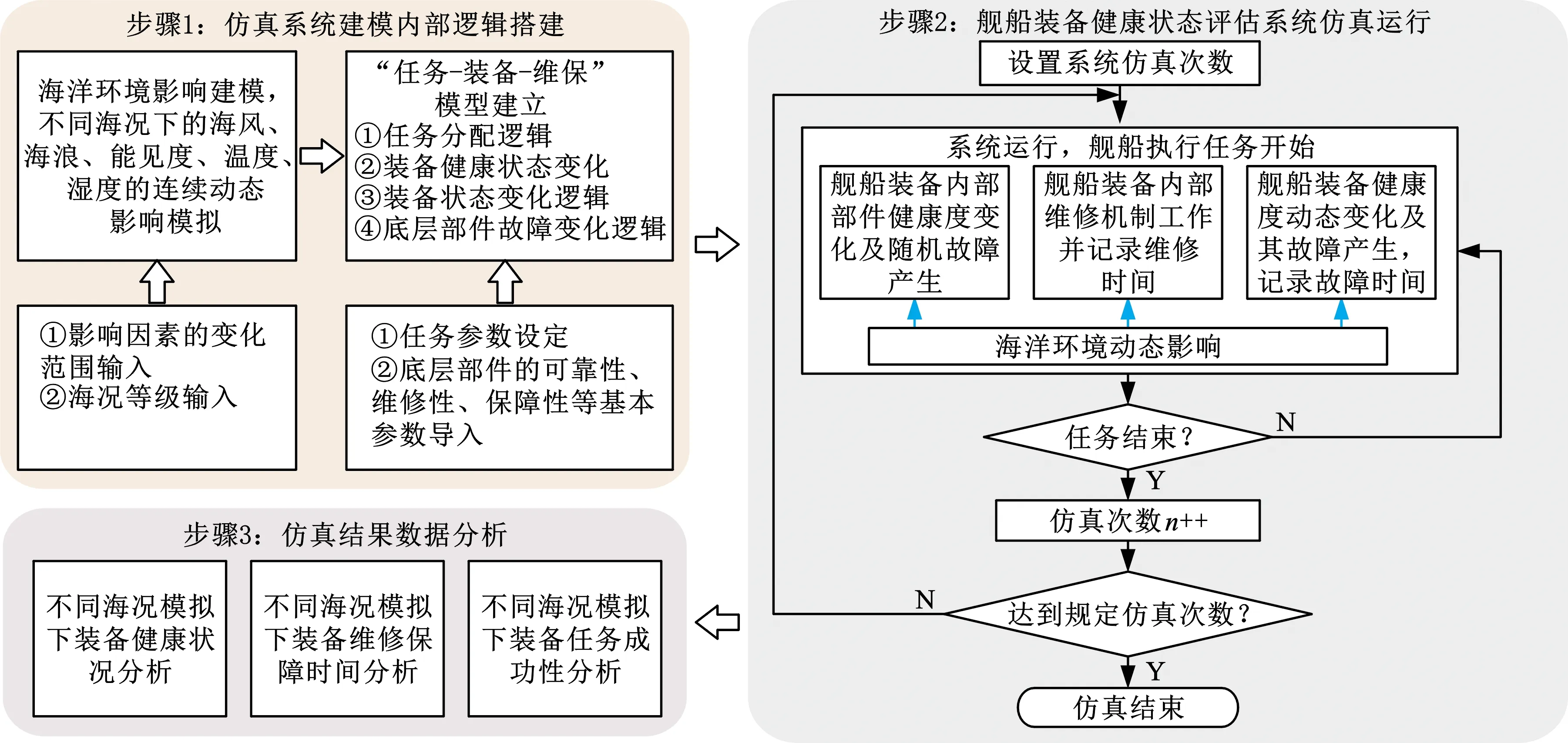
3.2 仿真流程
4 应用示例

5 结论